带渐消因子的容积卡尔曼滤波算法
2017-07-19贺姗,师昕
贺 姗,师 昕
(西安工程大学计算机科学学院,陕西 西安 710048)
带渐消因子的容积卡尔曼滤波算法
贺 姗,师 昕
(西安工程大学计算机科学学院,陕西 西安 710048)
在实际的非线性系统滤波问题中,会出现模型不匹配的情况,而标准容积卡尔曼滤波器对于这种模型不确定性的鲁棒性比较差,其滤波估计后的效果会出现较大的偏差。针对这个问题,结合强跟踪滤波器的思想,提出了一种新的带渐消因子的容积卡尔曼滤波算法。这个算法的主要思想是,在滤波过程中,引入渐消因子修正滤波器的状态协方差矩阵。应用这种方法能够获得比容积卡尔曼滤波更高的滤波精度。
非线性系统;强跟踪滤波;容积卡尔曼滤波;卡尔曼滤波
在状态估计中,如果为非线性系统,通常采用扩展卡尔曼滤波(Extended Kalman Filter,EKF)。这个算法的主要思想是,通过对系统的非线性方程进行泰勒级数展开,截取一阶项或二阶项对非线性函数进行线性化近似,再通过卡尔曼滤波器处理。2009年,Arasaratnam提出了容积卡尔曼滤波(Cubature Kalman Filtering,CKF),它是一种确定点采样滤波算法。然而在实际应用过程中,可能出现系统初始状态建模不准确的问题。
针对这个问题,周东华等人提出了强跟踪滤波器。强跟踪滤波器应对系统产生的状态突变等问题,该方法的滤波精度比较高。随后,在周东华等人提出的强跟踪滤波算法的基础上,又提出了一系列的改进算法,例如扩展卡尔曼滤波强跟踪算法(Strong Tracking Extended Kalman Filter,SEKF)滤波。
该算法通过引入强跟踪滤波因子修正滤波器的状态预测协方差矩阵,具有较强的跟踪性。本文将强跟踪滤波器算法应用到了容积卡尔曼滤波器算法中,提出了带渐消因子的容积卡尔曼滤波算法。
1 带渐消因子的容积卡尔曼滤波
针对滤波过程中出现的模型不确定性问题,基于前人所提出的强跟踪滤波算法,可以得到一种改进的滤波方法,即带渐消因子的容积卡尔曼滤波算法。该算法可以有效克服模型的不确定性。一个滤波器具有强跟踪性能的充分条件是需要满足正交性原理。正交性原理是,一个滤波器要成为强跟踪滤波器的充分条件是,在线选择一个适当的时变增益矩阵,从而得出:

式(1)中:γk为量测估计值与量测真实值间的误差(残差)。
当出现系统模型不匹配的情况时,需要在线调整时变增益矩阵,让残差序列仍然保持正交性,使得滤波器仍能满足正交性原理,能够保持较强的跟踪能力。为了使得滤波器具有强跟踪滤波器的特性,可以引入一个时变的渐消因子λ。具体实现方法是,在强跟踪容积卡尔曼滤波的预测误差协方差阵中引入渐消因子,而量测更新部分与标准容积卡尔曼滤波算法相同,此处不再赘述。
算法1是在线求解渐消因子λ,即:

式(2)中:ρ为遗忘因子,0.95≤ρ≤0.995;lk为弱化因子,lk≥1.
第一步,初始状态协方差因式分解:
第二步,计算积分点:

第三步,计算修正之后的积分点,得到新的积分点Xl,k-1│k-1.
第四步,计算增值积分点:

第五步,计算公式(3),得到估计状态,然后计算公式(4),得到预测误差协方差:

2 仿真实验和结果分析
针对单变量非稳定增长模型(Univariate Nonstationary Growth Model,UNGM),可得:

3 结论
针对非线性系统滤波问题,本文结合相关学者提出的强跟踪滤波算法,提出了带渐消因子的容积卡尔曼滤波算法。针对容积卡尔曼滤波对于模型不确定性的鲁棒性比较差这一问题,利用强跟踪滤波器在线调整增益矩阵,使得系统输出的残差序列仍然保持正交,则可以使得滤波器在实际系统中具有更强的跟踪性能。
实验仿真的结果表明,与标准容积卡尔曼滤波器相比,本文提出的带渐消因子的容积卡尔曼滤波算法,能够获得更高的滤波精度,均方根误差比较小。
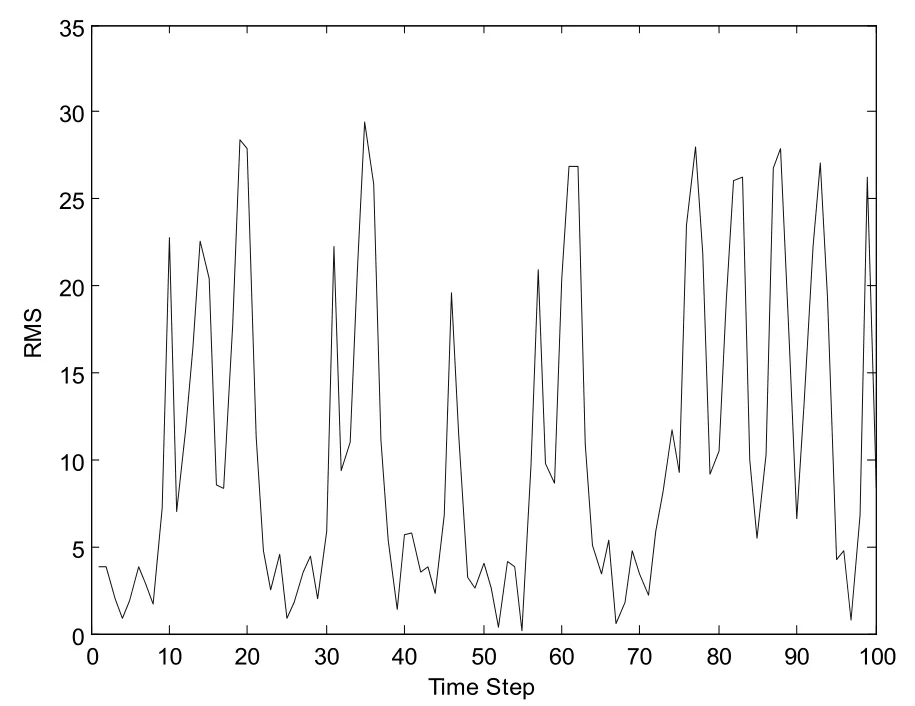
图1 容积卡尔曼滤波算法估计误差

图2 强跟踪容积卡尔曼滤波算法估计误差
[1]PS Maybeck,EJ Balder.Book-Review-Stochastic Models Estimation and Control.Space Science Reviews,1980,26(8):868-869.
[2]Arssaratnam I,Haykin S.Cubature Kalman filters.IEEE Trans onAutomatic Control,2009,54(6):1254-1269.
[3]周东华,席裕庚,张钟俊.非线性系统的带次优渐消因子的扩展卡尔曼滤波[J].控制与决策,1990,5(5):1-6.
[4]周东华,席裕庚,张钟俊.一种带多重次优渐消因子的扩展卡尔曼滤波器[J].自动化学报,1991,17(6):690-695.
[5]付梦印,邓志红,闫丽萍.Kalman滤波理论及其在导航系统中的应用[M].北京:科学出版社,2010:100-103.
[6]范文兵,刘春风,张素贞.一种强跟踪扩展卡尔曼滤波器的改进算法[J].控制和决策,2010,21(1):74-76.本文部分参考文献因著录项目不全被删除。
〔编辑:白洁〕
TN97
A
10.15913/j.cnki.kjycx.2017.13.001
2095-6835(2017)13-0001-02
