基于北斗/GPS组合差分技术的城市公交优先系统设计
2017-07-18唐述强黄伦文
唐述强,黄伦文
(安徽四创电子股份有限公司,合肥 230031)
基于北斗/GPS组合差分技术的城市公交优先系统设计
唐述强,黄伦文
(安徽四创电子股份有限公司,合肥 230031)
1 引言
我国很多城市交通压力大,交通拥堵、能源消耗严重,引导市民更多的选择公交出行,对于缓解交通压力具有重要意义。公交优先控制系统成为体现“公交系统的优越性和优先权,大力发展公交优先基础设施”的一大亮点。公交优先控制主要是通过对公交车辆的实时定位,优化交通信号灯触发事件,保证公交车辆优先通行。目前,公交车辆主要是通过安装车载导航型GPS终端来进行定位,但是这些终端基本采用单点定位方式,定位精度不高,一般只能达到10米,无法区分行车道,更无法辨别车辆的上下行,不能实现车道监控和公交车辆的精准位置监控,无法适合公交优先控制的定位。为了实现公交车辆精确定位,同时解决一些城市遮挡地区定位困难,本文采用北斗/GPS双模组合差分定位技术来进行公交优先系统的车载实时精确定位。
2 北斗/GPS组合差分定位原理
差分定位技术是利用卫星(北斗、GPS等卫星)载波差分定位原理,在基准站接收机和公交差分终端同步观测相同卫星的情况下,卫星的轨道误差、卫星钟差、接收机钟差以及电离层和对流层的折射误差等对观测量的影响具有一定的相关性。利用载波相位等观测量的不同组合进行求差实现相对定位,有效地消除或削弱相关误差的影响,提高相对定位的精度,实现公交车辆亚米级甚至厘米级定位精度[1]。北斗/GPS双模组合差分定位精度应用于公交优先系统能够很好解决在卫星信号无遮挡区的公交精确定位,通过北斗和GPS双系统的卫星信号进行融合差分处理,能够使得公交在部分城市遮挡地区增加可用解算卫星颗数,弥补单卫星系统在信号遮挡严重区域定位困难的不足,保证公交定位终端定位测速可靠性和精度[2]。北斗/GPS组合差分定位原理如图1所示。

图1 组合差分定位
3 北斗差分定位的快速公交优先系统设计
3.1 系统架构及工作流程
3.1.1 系统架构
基于北斗/GPS组合差分定位的公交优先系统主要由基准站、数据服务中心、数据通信系统和公交北斗/GPS差分终端组成。系统架构示意图如图2所示。
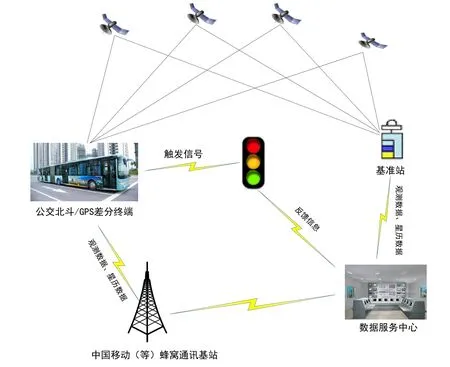
图2 系架构示意图
3.1.2 工作流程
整个系统工作流程:基准站进行卫星信号的捕获、跟踪、数据采集,并通过线缆、移动网络向数据服务中心播发该基站的观测量信息;数据服务中心通过移动网络进行数据处理、存储、分流并向公交北斗/GPS差分终端播发获取的基准站观测数据、坐标等数据;公交北斗/GPS差分终端获取数据服务中心发送的数据,并实时接收卫星数据,进行差分解算,实现快速公交的实时高精度位置解算,并根据坐标信息与红绿灯坐标进行距离解算,并将距离信息反馈,从而由红绿灯控制系统进行绿灯延迟或红灯早断。
3.2 系统实现
3.2.1 基准站建设
基准站实时进行BDS、GPS信号的捕获、跟踪及数据采集与传输,并通过数据服务中心将观测数据实时发送给各监测的城市公交终端,以进行差分解算。基准站由观测墩、北斗/GPS兼容型基准接收机、基准站接收天线、气象观测设备及其他通信、供电附属设备等组成。基准站选址应具备以下原则:
⊙ 应根据公交路线合理进行基准站选址,选址处基准站应有10°以上的地平高度角卫星通视条件。
⊙ 具有稳定、安全可靠的交流电电源,同时交
通应便利,便于人员往来和车辆运输。
⊙ 基准站远离电磁干扰区和雷击区,其距离不小于200m;远离周边的高大建筑、树、水体、和易积水地带,其距离不小于200m。
⊙ 应避开地质构造不稳定区域,避开铁路、公
路等易产生振动的地点。
3.2.2 数据服务中心建设
数据服务中心由计算机、网络设备、专业软件系统、供电系统以及机房等构成,中心具备数据管理、数据监控、数据处理分析及产品服务等功能,用于汇集、存储、处理、分析和分发基准站数据,为公交北斗差分终端进行高精度定位提供数据输入。
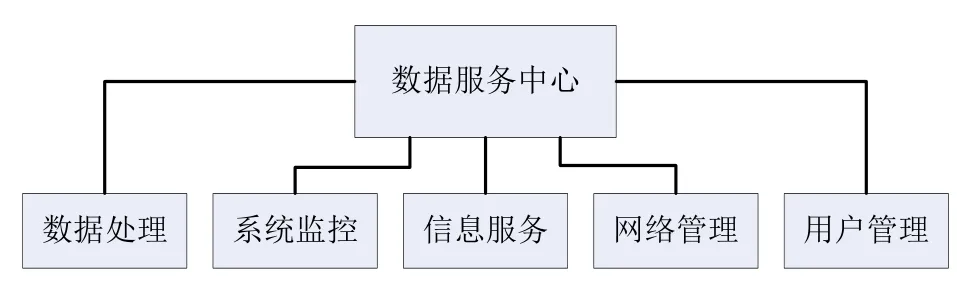
图3 数据服务中心功能
数据服务中心软件部署如表1所示。

表1 控制中心系统软件组成
3.2.3 数据通信系统
由于移动通信公共网络带宽高,速率快,能提供快速的双向通信链路,本文拟采用移动通信网络方式通信为主,其他通信方式为辅来实现系统的通信。移动通信网络播发模式将通过移动通信链路向各个公交北斗差分终端实时播发高精度差分数据[6]。通信链路能够保证如下功能:
⊙ 数据服务中心为各城市公交北斗差分终端实时播发差分增强数据,包括RTCM、CMR差分修正信息及系统完备性监测信息。
⊙ 各城市公交北斗差分终端可以实时向数据服务中心发送处理请求。
⊙ 网络系统采用开放式、标准化的结构,具有良好的功能扩展和升级能力。
⊙ 具备一定的通信网络安全机制。
3.2.4 公交/GPS北斗差分终端设计
北斗/GPS公交差分终端设计小型化、便携、适用于接入现有城市公交系统,主机主要由北斗/GPS差分模块、微控制板和数据链组成,主机几个部分之间采用串口通信[5]。天线采用北斗/GPS兼容型高精度测量型天线,天线在公交车上固定方式采用吸盘方式。差分终端对外通过GPRS输出车辆实时位置数据。终端设计如图4所示。

图4 终端设计
3.2.5 基于北斗/GPS差分位置的优先控制策略
公交差分终端实时(间隔1s)将公交当前位置、速度等数据发送至下一路口红绿灯控制器系统,红绿灯控制器系统计算将到达的公交车辆距离路口的距离及到达时间。并与到达时红绿灯状态进行对比分析,若公交在车次路口时间无延时,则按照原来的配时方案进行,不调整红绿灯时间;若到达路口时间有延时,启动公交优先信号调整方案,根据实际情况,延长红绿灯时间或者早断红灯时间[3],[4]。公交优先信号控制方案如图5所示。
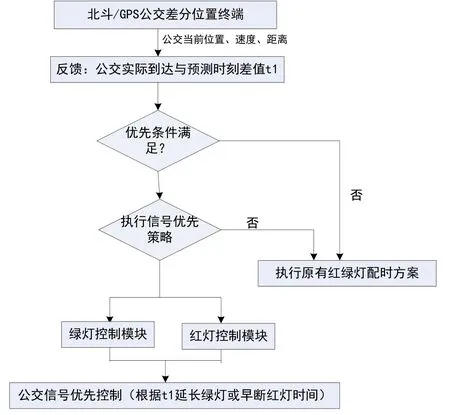
图5 公交优先信号控制流程
4 结束语
城市公交优先系统在一定程度上能够缓解城市交通压力,减少交通拥堵、能源消耗。本文采用北斗/GPS组合的载波差分定位技术来实现城市公交实时定位和测速,并分析了系统的架构、工作流程和各个部分的具体实现。系统能够实现各城市公交车辆的实时精确定位和测速,并将数据实时反馈至红绿灯控制系统和数据服务中心,为便捷城市公交优先通过即将到达的红绿灯路口,判断是否需要进行交通信号干预。
[1] 党亚民等.全球导航卫星系统原理与应用[M].北京:测绘出版社,2007
[2] 王霞迎.BDS/GPS基线解算算法研究[D],中国测绘科学研究院,2014
[3] 柳祖鹏.交叉口公交优先信号控制系统研究[J].武汉科技大学学报,2005(1)
[4] 曹世华,赵方.快速公交信号优先系统的设计与实现[J].工程应用技术与实现,2009,35(8)
[5] 梁本仁,斯庭勇,王世臣.基于北斗的车辆精确定位监测系统设计与实现[J].电子世界,2016(1)
[6] 文宗周,陈改霞.基于GPS/GPRS的远程车辆管理系统的设计[J].电子测量技术,2013(15)
Design of Urban Public Transport Priority System Based on Beidou/GPS Combined Differential Technology
Tang Shuqiang, Huang Lunwen
(AnHui SunCreate Electronics Co., Ltd., HeFei, 230031)
10.3969/J.ISSN.1672-7274.2017.06.009
TN96,U675.75文献标示码:A
1672-7274(2017)06-0029-03
唐述强,男,现任安徽四创电子股份有限公司总经理助理,高级工程师。
黄伦文,男,现任安徽四创电子股份有限公司高级工程师。
