基于双GPS载波相位差分的船载目标归心算法研究
2017-07-18杨开伟李娟娟时小飞
杜 辉,杨开伟,李娟娟,时小飞
(1.中国人民解放军92941部队,葫芦岛 125001;2.中国电子科技集团公司第五十四研究所,石家庄 050081;3.卫星导航系统与装备技术国家重点实验室,石家庄 050081)
基于双GPS载波相位差分的船载目标归心算法研究
杜 辉1,杨开伟2,3,李娟娟2,3,时小飞2,3
(1.中国人民解放军92941部队,葫芦岛 125001;2.中国电子科技集团公司第五十四研究所,石家庄 050081;3.卫星导航系统与装备技术国家重点实验室,石家庄 050081)
为完成对船载特定目标测量任务,本文提出一种基于双GPS载波相位差分模式,建立载体瞬时坐标系和船载待测点间相对位置关系,将主GPS天线位置归算到待测点的方法。实际测试结果表明,该方法能得到待测点各时刻三维位置和速度信息,精度优于传统单GPS修正方法,并具有实现简单、数据稳定、易于工程实现的优势。
单双GPS测量;载波相位;归心算法;坐标系
1 引言
舰船关键位置的测量在舰船建造、设备安装与试验过程中发挥着重要作用。由于舰船目标电磁环境复杂、待测点无法安装GPS天线、待测点附近环境复杂且遮挡严重无法实现载波相位差分定位等原因,GPS最佳测量点只能位于舰艏或舰尾,因此,必须通过间接测量方式计算待测点瞬时坐标[1-2]。如果要实现精确的部位修正,传统方式必须得到目标精确的瞬时三维姿态参数,即运动载体的偏航角、横滚角和俯仰角[3]。若利用GPS进行测姿必须在一个运动载体的几个不同位置上分别安装GPS接收天线,利用GPS定位数据求解出运动载体的姿态参数。利用GPS载波相位信号作为观测值,其定位精度很高,可实现载体姿态测量[4]。GPS测姿平台至少需要三点或两个非重叠矢量来确定,最少需要在运动载体上安设三个GPS接收天线,才能形成两条独立的基线,并且为保证精度,应尽可能保证较远的基线长度[5]。由于条件限制,在舰船上实现三天线测姿非常困难。本文在分析舰船结构特点的基础上,提出了一种利用双GPS测量舰船瞬时艏艉线实现部位修正的方法,该方法实现简单且易于实际工程应用,具有较高的艏艉线修正精度。
2 基于双GPS载波相位差分结果目标测量方法
2.1 测量天线与待测点相对位置关系建立
由于舰船中线有很高的装配精度,GPS天线应以舰船中线为基准装于关键点位同测。舰尾安装环境较为宽松,只要满足舰艏GPS天线安装,再安装舰尾GPS天线,使两天线距离中线相等。安装结束后需测量出各天线相位中心点到基座平台及舰中线的距离。由于待测关键点相对于载体位置已知,因此,关键点位置与舰尾GPS天线相位中心平行中线距离已知。由于载体运动时姿态变化较大,且测量环境复杂,应在舰船离港前进行不少于0.5h的测量,以获得两GPS天线之间的平行中线距离。各点位位置关系如图1所示。
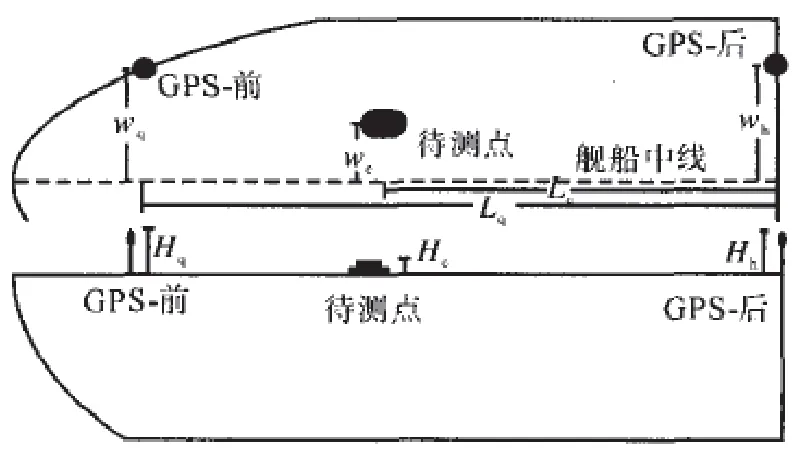
图1 位置关系图
2.2 载体瞬时坐标系建立
由于舰尾装备较少,干扰和遮挡较小,且便于载体坐标系建立,选择舰尾GPS天线相位中心为载体瞬时坐标系原点。OX轴:过坐标原点的切平面内,指向舰艏GPS天线相位中心在切平面的投影点;OY轴:过坐标原点的切平面的法线,指向向上;OZ轴:过坐标原点的切平面内,与OX、OY轴构成右手直角坐标系。依定义有WGS-84到载体瞬时坐标系转换公式如下:
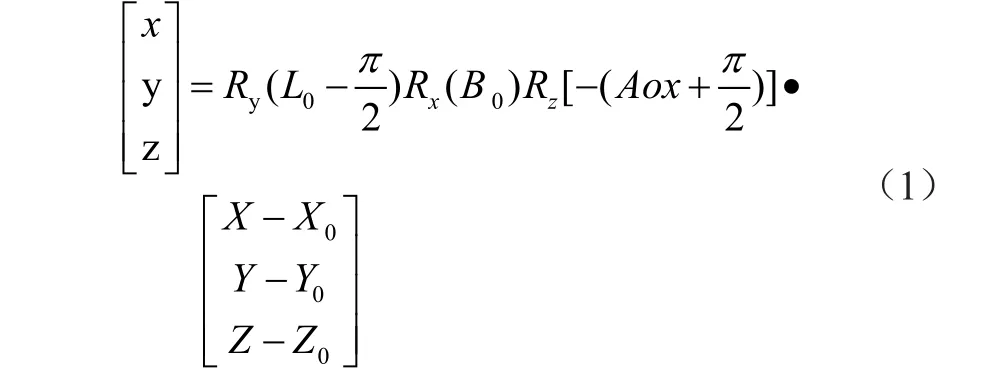
式中,Rx(A),Rx(A),Rx(A)为旋转矩阵。

Aox是舰尾GPS天线相位中心与舰首GPS天线相位中心连线形成的大地线的大地方位角。设舰尾GPS天线相位中心瞬时位置坐标为舰首GPS天线相位中心瞬时位置坐标为,将Aox置零,带入式(1)有:

(Xqj,Yqj,Zqj)为舰首GPS天线相位中心在瞬时平台坐标系下的坐标,其中,i=1,2,…,n,n为舰尾GPS记录点数;j=1,2,…,m,m为舰首GPS记录点数。Aox计算公式为:

计算时应注意Aox的象限判断。
2.3 部位修正
舰船上各装备位置关系如图1所示,由于所关心的是关键点位之间的关系,在假定舰船为刚体目标时,各关键点之间的关系与舰船形状无关,各点在载体瞬时坐标系关系如图2所示。
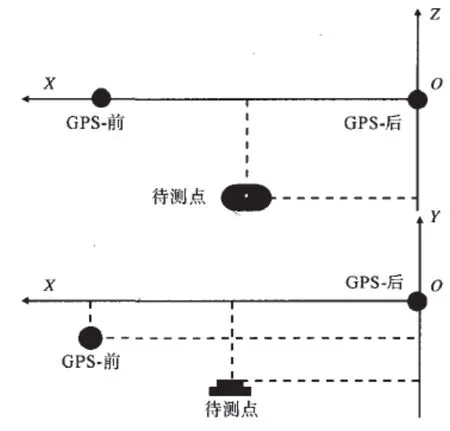
图2 载体瞬时坐标系关系图
已知信息包括:一是舰前GPS天线相位中心水平投影距中线距离Wq,舰尾GPS天线相位中心水平投影距中线距离Wh,待测点水平投影距中线距离Wc,且有Wq=Wh。二是舰前GPS天线相位中心与舰尾GPS天线相位中心水平投影与舰船中线平行距离Lq,待测点与舰尾GPS天线相位中心水平投影与舰船中线平行距离Lc。三是舰前GPS天线相位中心距待测点基座水平面距离Hq,舰尾GPS天线相位中心距待测点基座水平面距离Hh,待测点距其基座水平面距离Hc,并设Hh>Hq>Hc。
设t时刻舰前与舰尾GPS测量的大地高度为hq,hh,此时待测点基座水平面与载体瞬时坐标系平面夹角Psz计算公式为

设t时刻待测点在载体坐标系下的坐标为(xt,yt,zt),则有:

设t时刻舰尾地心坐标为[Xωt,Yωt,Zωt],则待测点地心坐标(xt,yt,zt)为:

3 测试分析
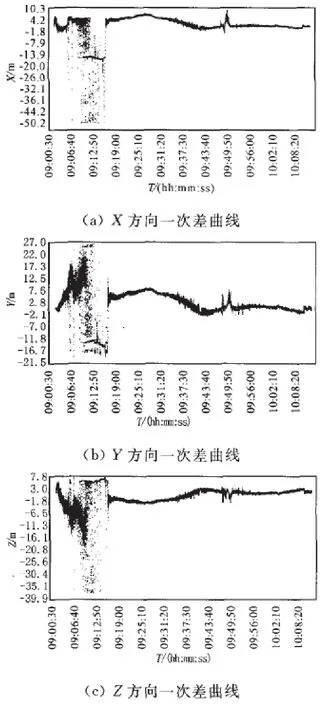
图3 X,Y,Z方向一次差曲线
以某次实测数据为例,待测点位于舰艏艉线右侧,水平投影距中线距离3.24m,与舰尾GPS天线相位中心沿舰艏艉线方向距离27.53m,高于基面5.78m。GPS接收机为JAVAD双频接收机,记录频率20Hz,两GPS天线水平投影距舰中线距离相等,舰前GPS天线相位中心高于基面1.12m,舰尾GPS天线相位中心高于基面0.71m。双GPS部位修正与单GPS计算航向部位修正结果在相同时刻三维地心坐标一次差值曲线如图3所示。以双GPS部位修正结果为基准,对单GPS计算航向部位修正结果进行分析,其趋势性偏差和随机性偏差统计结果如表1所示。

表1 偏差统计
分析两种测姿计算结果可知:由于受风浪等因素的影响,舰船运行方向与艏艉线指向不同,使用计算航向代替大地方位角存在指向偏差,且无法计算角Psz,当目标速度小于一定数值或舰船转弯时,舰船速度变化剧烈,计算航向突变散乱现象严重,单GPS计算航向部位修正失效。基于以上分析得出,双GPS部位修正精度和数据稳定性都优于单GPS计算航向部位修正结果。
4 结束语
利用GPS载波相位差分数据测量舰船瞬时艏艉线实现部位修正具有高精度、投入小、不受天气限制等优点,并且可根据试验的实际环境灵活安装天线,具有其他测量手段所没有的优势。部位修正结果数据稳定说明该方法对目标姿态变化具有较强的适应性,舰前后GPS基线距离较远,因此载体瞬时坐标系OX轴方向有很高的修正精度,但由于只有二维信息,坐标Y、Z对舰船横滚角变化较为敏感,修正精度较差,是本方法的不足之处。
[1] 袁建平,罗建军,岳晓奎等.卫星导航原理与应用[M].北京:中国宇航出版社,2003:112-114
[2] 刘基余.GPS卫星导航定位原理与方法[M].北京:科学出版社,2006:180-186
[3] 谭颖.粒子滤波在船舶姿态测量技术中的应用[D].重庆邮电大学,2007:13-14
[4] 崔铭.基于GPS的姿态测量算法研究[D].哈尔滨工程大学,2008:29-33
[5] HAYWARD R,MARCHICK A,POWELL J D.Single baseline GPS based attitude heading referencesy stem (AHRS) for aircraft applications[c]//A-merican Control Conference,Proceedings of the 1999,1999,5(6):3655-3659.
[6]LOH R,WULLSCHIEGE V. The U.S.wide-area-augmentationsystem(WAAS)[J].Journal of The Institute of Navigation, 1998, 42(3):435—466.
[7] 张成军,许其凤,常志巧等.GPS定向中大地方位角解算问题研究EJ-I.测绘通报,2008(12):1-3
[8] 韦峰.GPS测量的应用研究[D].西安科技大学,2007:6-7
LINEAR ACOUSTIC发布支持MPEG-H 3D音频内容的制作工具
近日,Telos Alliance电视解决方案集团旗下品牌Linear Acoustic发布全新AMS™监听制作系统。AMS能够提供实时监听、渲染并制作个性化、沉浸式音频节目的综合解决方案并支持ATSC 3.0数字电视系统以及ATSC 3.0官方标准中的MPEG-H电视音频系统。
广播电视专业人员和消费者能够通过MPEG-H独特的技术特点享受沉浸式音频效果以及自然的聆听体验。另外,用户可以通过设备上的控制界面调整个性化的声音效果,该性能包括:选择不同的体育赛事评论员,通过对音量的调整增强语音的可懂度等。与此同时,凭借MPEG-H技术,能够为不同设备和收听环境定制最佳还放效果并实现通用传输,例如:智能手机和家庭影院。
Linear Acoustic AMS为实时广播而定制,能够支持沉浸式音频的实时编写、渲染和监听工作。其网站界面能够让编辑师便捷的实现前面提到的MPEG-H互动性功能,并且定义各种收听预设(MPEG-H电视音频系统的另一项技术特征)。实现音频预设的方式为:单个音频元素,例如声道分配、声音对象和场景能与用户指定的静态和动态元数据相结合,从而创造出沉浸式和个性化的音频体验。
在2017年NAB会议期间(2017年4月24日-27日),Linear Acoustic AMS荣获TV Technology杂志颁发的“2017最佳展示奖”。了解更多关于Linear Acoustic AMS的信息,欢迎访问:https://www.telosalliance.com/Linear/Linear-Acoustic-AMS-Authoring-Monitoring
Research on Shipborne Target Centering Algorithm Based on Dual GPS Carrier Phase Difference
Du Hui1, Yang Kaiwei2,3, Li Juanjuan2,3, Shi Xiaofei2,3
(1.92941Unit, the People’s Liberation Army, Huludao, 125001; 2.The 54th Research Institute of CETC, Shijiazhuang, 050081; 3.State Key Laboratory of Satellite Navigation System and Equipment Technology,Shijiazhuang,050081)
Because of the particularity of the ship structure, the single GPS traditional measurement method can not meet the measurement requirements of the ship-borne special target. In order to accomplish the task of the ship-specific target measurement, this paper proposes a method based on the dual GPS carrier phase difference model to establish the relative position relationship between the carrier instantaneous coordinate system and the ship-to-be measured point, the main GPS antenna position to the measured point method. The experimental results show that the proposed method can obtain the 3D position and velocity information at each time point to be measured, and the accuracy is superior to the traditional single GPS correction method, and has the advantages of simple realization, data stabilization and easy engineering realization.
Dual GPS measurement; carrier phase; Centering algorithm; coordinate system
10.3969/J.ISSN.1672-7274.2017.06.002
TN96文献标示码:A
1672-7274(2017)06-0005-04
杜 辉,男,1979年生,硕士,工程师,主要研究方向为导航与定位。
