数据驱动的插电式混合动力客车能量管理策略
2017-07-18胡艳青李中延
周 纬, 杨 林, 胡艳青, 周 维, 李中延
(上海交通大学 机械与动力工程学院,上海 200240)
数据驱动的插电式混合动力客车能量管理策略
周 纬, 杨 林, 胡艳青, 周 维, 李中延
(上海交通大学 机械与动力工程学院,上海 200240)
针对插电式混合动力公交客车的能量管理优化问题,提出了基于庞特里亚金极小值原理的两类工况片段新特征参数,其中非平衡状态特征参数与转速-扭矩分布相关,平衡状态特征参数与最优控制相关,并由此构建了行驶工况数据库.针对影响该类车辆能耗的关键阶段——电能平衡阶段,通过工况间的相似性,提出了含修正的数据驱动的最优等价因子估计方法,构建了数据驱动的能量优化管理策略.结果表明,该策略能使不同实际工况采用的等价因子和电池荷电状态SOC轨迹接近于理论最优,较目前常用的规则策略能显著地提升燃油经济性约5.72%,较同类研究能克服准确预测车辆未来行驶工况的难题.
混合动力公交客车; 能量管理策略; 数据驱动; 庞特里亚金极小值原理; 特征参数
近年来,插电式混合动力公交客车(plug-in hybrid electric bus,PHEB)得到了快速发展.目前,PHEB普遍采用“电能消耗-电能维持”的能量管理策略.由于电池能量的限制,PHEB在其一天约200~300 km的行驶里程中,电能消耗阶段的纯电行驶里程一般仅约50 km.所以,PHEB实际上主要以电能维持的方式运行,优化此阶段的能量管理策略是提高PHEB燃油经济性的关键.
在电能维持阶段,已有研究中常用的优化算法主要包括局部最优的等效燃油消耗最小策略(equivalent consumption minimization strategy,ECMS)[1],以及全局最优的庞特里亚金极小值原理(Pontryagin’s minimum principle,PMP)[2]和动态规划(dynamic programming,DP)等[3].其中,利用PMP和DP虽然能够获得最佳的燃油经济性,但需要预先知道整个行驶工况的信息[4].为此,针对通勤线路行驶工况随机性的问题,Ichikawa等[5]通过k均值聚类的方法对每一路段的车速轨迹进行分类,再利用马尔科夫链预测下一路段的类别.Larsson等[6]根据道路上相近时间的历史数据选择典型工况,利用DP算法预先确定适合典型工况的优化控制策略.Zeng等[7]采用基于道路片段的随机动态规划方法,将油耗和电耗看作随机变量,通过历史数据估计两者的分布.但这些方法只是从统计的角度使用历史数据,没有充分利用各个行驶工况隐含的信息,难以针对实际工况进行自适应的优化控制.
为此,本文将利用公交线路上车辆运行的历史数据构建行驶工况数据库,提出基于极小值原理的两类新的特征参数来表征工况,并利用相似性原理在线识别车辆行驶工况,进而建立数据驱动的方法实现PHEB在电能平衡阶段的能量优化管理.
1 基于PMP的能量管理优化算法
本文以单轴并联式混合动力系统的PHEB为例进行研究,系统结构如图1所示,具有纯电驱动、并联驱动和制动能量回收等功能.表1是系统的主要参数.
由于离合器结合过程中损失的能量远小于整车行驶过程中消耗的能量,因此本文在系统建模中忽略该部分能量损耗.在纯电驱动和并联驱动模式下:

图1 并联式混合动力系统结构示意图Fig.1 System architecture of parallel hybrid electric vehicles表1 动力系统部件的主要参数Tab.1 Power system components parameters

系统部件主要参数发动机最大扭矩782N·m,最大功率162kWISG电机峰值转矩700N·m,额定/峰值功率为50/100kW动力电池钛酸锂电池,标称电压489V,标称容量33AhAMT五档变速箱后桥速比4.875
(1)
式中:nMG,TMG分别为电机转速和转矩;nICE,TICE分别为发动机转速和扭矩;n,T分别为驱动车辆所需要的变速箱输入端的转速和扭矩.

(2)
式中,f1和f2是以实验数据制定的表格为基础的查表函数.
利用电池内阻模型[8]计算电池电流I和功率PBP:
(3)
(4)
式中,UOC,R分别为电池的开路电压和内阻.
对于混合动力系统,在电能平衡阶段可以认为电池开路电压和内阻为定值[8].由极小值原理可以得到Hamilton函数为
(5)
式中:x为状态变量;t为时间;u为控制变量;Hlow为燃料的低热值;λ为拉格朗日乘子.
PHEB燃油消耗取极小值的必要条件为[9]
(6)
(7)
式中:SOC为电池的荷电状态,是混合动力系统的状态变量;PBP为混合动力系统的控制变量.
根据Hamilton函数的形式,可以把拉格朗日乘子看作燃油能量和电能量的等价因子.由式(6)可见,电能平衡阶段能量管理的最优解是一个常量等价因子.但由于难以准确获取未来的行驶工况,该因子无法预先计算,应用PMP时需要进行自适应的调整[10].
2 数据驱动的最优等价因子估计方法
公交车在公交线路上运行时,每天都会产生大量的行驶过程数据,这些数据隐含着行驶工况的特征信息.通过数据驱动的方式,从新的角度合理地分析与利用这些历史数据,可以避免从机理上构建精确车辆行驶工况预测模型的困难.本文以上海市某条公交线路(共有22个站点,约17 km)为例进行研究,通过安装在公交车上的车载信息采集终端获取实时车速等信息.
2.1 基于PMP的行驶工况特征参数及数据库
基于行驶工况的相似性进行混合动力汽车能量管理自适应控制是目前较常用的思想[11],如何表征工况是首先需要解决的问题.在已有的研究中,一般采用车速轨迹统计得到的运动学统计特征参数(如平均车速等)[12],但这些参数与整车能耗并不直接相关.考虑到PMP优化的等价因子取决于整车转速-扭矩的分布,所以,本文提出基于PMP计算的新特征参数.计算时,采用从起点到每个站点的路段构建工况片段,包含从起点开始的所有工况信息.同时,由于车辆运动学特征在先后顺序上的差异并不影响最优等价因子,因此该工况片段构建方法可包容这种差异,从而减小数据库中工况的数量.
定义3个参数序列:
a. 通过固定等价因子序列[λ1,λ2,…,λn]和PMP计算得到的当前站点与起点间电池荷电量的变化量序列,即ΔSOC序列:
序列中:λ1~λn均匀分布在某一区间内,本文通过试算确定为2.08~2.18;tr=i表示当前工况片段所处线路的编号;st=j表示当前站点的编号,对于本文研究线路,j∈[2,3,…,22],j=1代表起点站;序列的个数n在下文中确定.
b. 工况片段所处的线路在电池SOC平衡时的最优等价因子.
λ*|tr=i
c. 工况片段所处的线路根据最优等价因子计算得到的每个站点与起点间的最优ΔSOC序列.
其中,第一组参数序列直接体现了工况片段对于不同等价因子的敏感程度,称为非平衡状态特征参数(第一类特征参数);第二、三组参数体现了工况片段和电能平衡阶段最优控制之间的联系,称为平衡状态特征参数(第二类特征参数).通过这两类新特征参数,可以构建该线路上公交车的行驶工况数据库.
为了检验非平衡状态特征参数的合理性,可以比较按不同特征参数构建出的相似工况的PMP最优等价因子.将数据库中每条线路拆分成21个片段,计算每个片段的11个运动学统计特征参数[13]和非平衡状态特征参数(n=11),对原始线路按欧氏距离最小的原则逐一从库中选择最相似的片段来构建工况.任选7条线路对比(见图2)可见,非平衡状态特征参数构建的相似工况与实际工况的最优等价因子普遍接近(平均偏差0.003 4),说明该参数更适合表征转速-扭矩分布.平衡状态特征参数的合理性将在下文进行分析.

图2 特征参数构建的工况与实际工况的等价因子Fig.2 Equivalence factor between the real and parameter-based driving conditions
2.2 工况相似性的判断
实现基于历史工况信息的数据驱动的PHEB能量优化管理,关键点之一在于如何从工况库中识别出差异较小的工况片段.本文采用非平衡状态特征参数进行工况相似性的判断,定义等价因子为λk时,当前工况(tr=m)与数据库中某条线路(tr=i)对应工况的“距离”为
(8)
则判断工况相似的条件为
(9)
式中:δini为初始阈值,在下文讨论;δadd=0.001k(k=0,1,2,3,…)为附加阈值.由于数据库中并不一定存在满足初始阈值条件的相似工况,k应在保证有4个相似工况的前提下尽量小.
2.3 最优等价因子的估计方法
定义当前工况片段和相似工况片段之间的“能耗状态差”为
(10)
式中:Um为数据库中与当前工况相似的工况集合;ΔSOC|tr=m,st=j为当前处于第j个站点时的真实ΔSOC.
假设:对于公交线路上两个非平衡状态特征参数相似的从起点到当前站点的工况,若能耗状态接近,则它们所在的完整工况的最优等价因子接近.
对当前工况,可在相似工况中选择能耗状态差绝对值最小的工况进行最优等价因子的估计.
(11)

当数据库中的样本较少或者当前工况与数据库样本有一定差异时,只能寻找到极少的相似工况,且能耗状态差并不接近于0.但通过对相似工况集合中能耗状态差与对应最优等价因子间的相关系数进行统计分析(见图3),可以发现:
a.由于相似工况片段的最优等价因子越大,越倾向于耗油,最优ΔSOC*越大,式(10)定义的能耗状态差越低,因此相关系数基本为负值.
b.相关系数绝对值在0.7以上的共占约76%,可以认为两者间存在良好的线性关系.

图3 能耗状态差与最优等价因子间相关系数的分布Fig.3 Distribution of correlation coefficient between the energy consumption status difference and optimal equivalence factor
计算也发现,对于单个工况,不同等价因子与PMP计算的ΔSOC在一定范围内总体呈近似线性的关系.因此,对于相似工况,最优等价因子和最优ΔSOC*之间也存在类似关系,只是由于工况并非完全相同,线性关系有一定减弱.故在当前站点处,将相似工况最优等价因子和能耗状态差近似线性为
(12)
令能耗状态差为0,则估计的最优等价因子为
(13)
为了确定工况相似性判断的两个参数n和δini,利用数据库中的数据进行测试.针对第m条线路数据,每到达一个站点时,利用式(8)和式(9)从数据库剩余线路中选择相似的工况片段.假设从起点到当前站点一直采用最优等价因子,计算得到真实ΔSOC,再根据式(11)或式(12)进行等价因子的估计,则整条线路(22个站点)等价因子估计的误差为
(14)
数据库中所有l条线路等价因子估计的平均误差为
(15)
表2为根据式(11)估计等价因子时不同参数组合的平均误差.可见,当n=4,δini=0.005时,既能减少特征参数的数量,又能保证平均误差处于较低的水平(0.006 5),故这是一组合适的参数.而采用这组参数,根据式(12)估计的等价因子平均误差为ε=0.003 9,减小了约40%.图4是两种方法在每个站点处所有线路估计的绝对误差分布.可见,根据式(12)估计的等价因子绝对误差有显著的减小.这一结果也验证了前述假设的合理性.
2.4 能耗状态差侧偏时的最优等价因子估计修正
在实际的能量管理策略中,由于之前估计存在偏差等原因,可能导致能耗状态差出现侧偏(即恒大于0或恒小于0)的情况.首先针对前者进行讨论.根据上文的分析,若直接利用拟合的式(12)求能耗状态差为0时的等价因子,则
(16)

图4 每个站点等价因子估计的绝对误差箱线图Fig.4 Boxplot of the equivalence factors absolute error at each station
这意味着,当真实ΔSOC大于所有相似工况的最优ΔSOC*时,式(12)的估计方法认为通过更大的等价因子可以实现SOC的平衡.实际上,真实ΔSOC已经偏高,更大的等价因子可能使真实ΔSOC更高,故此时需对式(12)进行修正.
从全局和未来的角度考虑(图5),真实ΔSOC偏高,意味着未来需要消耗的电量更多,即未来实际工况与相似工况的能耗状态差需要更小(绝对值更大).因此,对单个站点进行估计,只需在线性拟合前,对能耗状态差作出修正.定义“修正能耗状态差”为
其中,修正值采用最相似工况的能耗状态差,即

图5 等价因子修正的原理图Fig.5 Equivalence factor correction principle
对于能耗状态差恒小于0的情况,作相似的处理,修正值小于0;对于正常的情况,可以认为修正值等于0.针对连续估计的过程,需对修正值进行累积,即到达第j个站点时,修正能耗状态差为
修正后,与最优等价因子线性拟合的结果为
(20)
取修正能耗状态差为0时的等价因子作为估计值,即
(21)
3 数据驱动的能量管理策略与测试
基于前述研究,本文提出的一种数据驱动的能量优化管理策略及其流程如图6所示(见下页).其中,为提高后续控制中的工况相似性,在车辆到达终点后,根据当前工况与数据库中已有工况的相似程度进行数据库的滚动更新,并利用不同等价因子下的系统最优控制MAP计算工况的两类特征参数.

图6 数据驱动的能量优化管理策略Fig.6 Data-driven optimized energy management strategy
为对能量管理策略进行充分测试,对于采集到的93条线路数据,依次以一条线路作为测试样本,其余92条线路构成行驶工况数据库,总计进行93条线路的测试.这样,在最大化测试次数的同时,保证当前工况不包含在数据库中.
行程开始时需要一个初始的等价因子.为了检验修正后的等价因子估计方法(式(18)~(21))相对于修正前的方法(式(12)~(13))是否更有效,设置SOC初值为0.5,将初始等价因子设为待测工况的最优等价因子(初值最优),比较等价因子估计误差(式(14))、SOC终值和SOC轨迹误差的分布(见图7和图8).其中,SOC轨迹误差为
(22)
式中,SOC*(t)为最优的SOC轨迹.
可见,修正后估计方法的等价因子估计误差小于0.015的比例更多且分布集中,SOC终值更接近于初值0.5,SOC轨迹误差更接近于0.说明相同的初始等价因子条件下,修正后的方法能够获得更好的估计结果.
实际上,最优等价因子不可能提前获得,为明确初始等价因子的影响,将其设为数据库中最优等价因子的均值2.129 4 (定初值),采用修正后的等价因子估计方法,结果如图9所示.

图7 修正前等价因子估计方法的结果(初值最优)Fig.7 None correction method results (optimal initial value)

图8 修正后等价因子估计方法的结果(初值最优)Fig.8 Correction method results (optimal initial value)

图9 修正后等价因子估计方法的结果(定初值)Fig.9 Correction method results (constant initial value)
比较图8与图9可见,定初值修正后估计方法的等价因子估计误差、SOC终值和SOC轨迹误差分布稍逊于初值最优时对应的结果,但总体趋势与之相近.说明,虽然初始等价因子对控制策略的优化存在一定的影响,但本文方法仍能使策略接近于最优,且能应用于PHEB的在线实时控制中.
引入基于门限值和发动机最优工作区间的规则控制策略作为对比,结果如图10所示,SOC终值和SOC轨迹误差的分布与等价因子估计的方法相比存在明显差距.与图9比较,说明本文方法在SOC控制方面明显优于规则控制策略.

图10 规则控制策略的结果Fig.10 Rule-based control strategy results
将定初值修正后估计方法中等价因子估计误差最小和最大的2个行驶工况,与PMP最优控制和规则控制的SOC轨迹相比较,如图11所示.当等价因子估计误差较小时,SOC轨迹与最优轨迹非常接近(εsoc track=0.001 1);当估计误差最大时,则存在一定偏差(εsoc track=0.035 1),这主要是由于该工况的最优等价因子较大,而数据库中相似工况较少.但规则控制策略的SOC轨迹与最优轨迹间的偏差普遍较大(εsoc track分别为0.028 4和0.030 1).
图12是对93条线路3种控制策略能耗结果的比较.可见,规则控制的等效油耗明显偏高,而定初值修正后等价因子估计方法的等效油耗与最优控制的结果非常接近(平均偏差为0.13%),具有良好的节油效果,并能适应不同的行驶工况.经统计,与规则控制策略相比平均节油5.72%,最大节油9.93%.

图11 不同控制策略的SOC轨迹Fig.11 SOC track of different control strategies
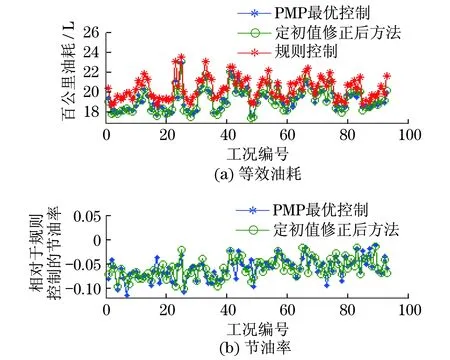
图12 不同控制策略的能耗比较Fig.12 Comparison of energy consumptions between different control strategies
4 结论
针对影响插电式混合动力公交客车能耗的关键阶段——电能平衡阶段,本文提出了数据驱动的能量优化管理策略,通过对等价因子的近似最优估计,得到的实际SOC轨迹和等效油耗与PMP计算的全局最优结果基本接近,且对于不同的工况具有良好的适应能力,较目前常用的规则控制策略具有明显优势,可对不同工况平均降低油耗约5.72%.
a. 采用基于历史数据构建行驶工况数据库的方法,从数据驱动的角度挖掘历史工况所蕴含的信息,摆脱了对车辆未来行驶工况数据的依赖.
b. 比较常用的由车速轨迹统计得到的表征工况片段的运动学统计特征参数,提出的基于PMP原理的非平衡状态特征参数,可更好地反映工况片段与整车能量消耗(转速-扭矩分布)之间的关系;提出的平衡状态特征参数,可更好地反映工况片段与能量管理最优控制之间的关系.在减少特征参数数量的同时,为该类车辆能量优化控制提供了新的、更有效的工况特征表征方法.
c. 建立了以工况片段为基础的数据驱动的插电式混合动力公交客车能量优化管理策略,通过非平衡状态特征参数识别相似工况,通过平衡状态特征参数进行最优等价因子的估计,可对估计过程中的偏差作出在线修正,实现全局近似最优的实时控制.
[1] 杨超,焦晓红,李亮,等.面向公交客车应用的插电式混合动力实时优化策略研究[J].机械工程学报,2015,51(22):111-119.
[2] KIM N,CHA S W,PENG H.Optimal equivalent fuel consumption for hybrid electric vehicles[J].IEEE Transactions on Control Systems Technology,2012,20(3):817-825.
[3] LI L,YANG C,ZHANG Y H,et al.Correctional DP-based energy management strategy of plug-in hybrid electric bus for city-bus route[J].IEEE Transactions on Vehicular Technology,2015,64(7):2792-2803.
[4] 林歆悠,孙冬野,邓涛.基于极小值原理的混联混合动力客车能量管理策略优化[J].汽车工程,2012,34(10):865-870.
[5] ICHIKAWA S,YOKOI Y,DOKI S,et al.Novel energy management system for hybrid electric vehicles utilizing car navigation over a commuting route[C]∥Proceedings of 2004 IEEE of Intelligent Vehicles Symposium.Parma:IEEE,2004:161-166.
[6] LARSSON V,MÅRDH L J,EGARDT B,et al.Commuter route optimized energy management of hybrid electric vehicles[J].IEEE transactions on intelligent transportation systems,2014,15(3):1145-1154.
[7] ZENG X R,WANG J M.A two-level stochastic approach to optimize the energy management strategy for fixed-route hybrid electric vehicles[J].Mechatronics,2016,38:93-102.
[8] KIM N,CHA S,PENG H.Optimal Control of Hybrid Electric Vehicles Based on Pontryagin’s Minimum Principle[J].IEEE Transactions on Control Systems Technology,2011,19(5):1279-1287.
[9] 刘豹,唐万生.现代控制理论[M].北京:机械工业出版社,2000:983.
[10] CHASSE A,SCIARRETTA A,CHAUVIN J.Online optimal control of a parallel hybrid with costate adaptation rule[J].IFAC Proceedings Volumes,2010,43(7):99-104.
[11] HU Y Q,YANG L,YAN B,et al.An online rolling optimal control strategy for commuter hybrid electric vehicles based on driving condition learning and prediction[J].IEEE Transactions on Vehicular Technology,2016,65(6):4312-4327.
[12] 石琴,郑与波,姜平.基于运动学片段的城市道路行驶工况的研究[J].汽车工程,2011,33 (3):256-261.
[13] WANG R,LUKIC S M.Review of driving conditions prediction and driving style recognition based control algorithms for hybrid electric vehicles[C]∥Proceedings of 2011 IEEE Vehicle Power and Propulsion Conference.Chicago,IL:IEEE,2011:1-7.
(编辑:丁红艺)
Data-Driven Optimal Energy Management Strategy for Plug-in Hybrid Electric Buses
ZHOU Wei, YANG Lin, HU Yanqing, ZHOU Wei, LI Zhongyan
(SchoolofMechanicalEngineering,ShanghaiJiaoTongUniversity,Shanghai200240,China)
Two classes of new characteristic parameters based on Pontryagin’s minimum principle were proposed for the energy management optimization of plug-in hybrid electric buses and were used to build a driving condition database,in which non-equilibrium state characteristic parameters were related to the speed-torque distribution and equilibrium state characteristic parameters were related to the optimal control.A data-driven optimal equivalence factor estimation method with correction capability was also proposed and a data-driven energy management strategy was built through the driving condition similarity in the stage of charge sustaining,which is a key stage for the fuel consumption of buses.The results show that the strategy can make the equivalence factor andSOC(state of change) trajectory of different trips be close to the optimal.The new strategy improves the fuel economy by about 5.72% comparing with the rule-based strategy,and it can overcome the difficulty in accurately predicting future driving conditions.
plug-inhybridelectricbus;energymanagementstrategy;data-driven;Pontryagin’sminimumprinciple;characteristicparameters
1007-6735(2017)03-0241-08
10.13255/j.cnki.jusst.2017.03.007
2017-01-09
国家自然科学基金资助项目(51275291)
周纬(1992-),男,硕士研究生.研究方向:新能源汽车控制策略.E-mail:zhouweizw1992@163.com
杨林(1969-),男,教授.研究方向:内燃机电子控制、汽车电子技术等.E-mail:yanglin@sjtu.edu.cn
U 469.7
A
