植保无人机药箱液量监测装置的设计与试验
2017-07-18周志艳兰玉彬罗锡文
姜 锐,周志艳,3,徐 岩,兰玉彬,罗锡文
植保无人机药箱液量监测装置的设计与试验
姜 锐1,2,周志艳1,2,3※,徐 岩1,兰玉彬1,2,罗锡文1,2
(1. 华南农业大学工程学院/广东省农业航空应用工程技术研究中心,广州 510642; 2. 国家精准农业航空施药技术国际联合研究中心,广州 510642;3. 南方粮油作物协同创新中心,长沙 410128)
药箱的液量是植保无人机精准作业中需要监测的重要信息之一。为了实现对植保无人机药箱液量的实时监测,针对植保无人机作业过程中存在的液面波动剧烈、药液的理化特性各异、药箱空间小、防腐蚀要求高等特点,该文提出一种双气压式液量监测装置的设计方案,包括双气压式液位监测、药箱液面震荡干扰滤波、机身倾斜干扰校正以及液位-液量换算模型等。为了验证方案的可行性,制作了液量监测装置的样机,并设计了相关的验证试验进行性能测试。试验结果表明:采用同时监测环境气压和密闭气室内气压的双气压式差值法,液位高度与气压差值之间呈线性负相关关系,决定系数为0.998 9,可有效消除环境气压变化对测量精度和稳定性带来的影响;融合了中位值平均滤波法与滑动平均滤波法优势的混合数字滤波算法,使药箱液位数据的变异系数由滤波处理前的28.45%降低到12.27%,对液面震荡干扰具有较好的滤波效果;基于微机械陀螺仪的校正算法,在机身倾斜30°时,气压差值误差从校正前的-1.09 hPa,降低至校正后的0.05 hPa,可较好地消除植保无人机飞行中机身倾斜带来的药箱倾斜干扰误差;在植保无人机机载动态测试试验中,设计了前进、后退、田间掉头移行等3种常见的飞行工况中进行测试,在2、4、6 L的载药量时,液量监测器输出的液量数据均值分别为1.985、3.942、5.984 L,经过校正处理后液量相对误差分别为0.75%、1.45%、0.77%,均方根误差分别为0.182、0.199、0.180 L,表明液量监测器在不同实际作业工况中的数据输出较稳定可靠。
无人机;设计;试验;农业航空;药箱;液量监测;无线监测
0 引 言
药箱是植保无人机的关键部件,在植保作业过程中,药箱内药液处于质量变化状态,其中的药量随着作业推进逐渐减少,是一个动态变化的过程。因此,飞控手要进行施药的精准控制,必须时刻关注药箱的药量信息,以便根据药箱的药量及时调整植保无人机的飞行操控策略,例如药箱药量与电池电量或油料的优化搭配、断点续喷等。通过实时掌握药箱药量信息,可最大限度避免发生频繁起降、电池损耗大、作业效率低下和漏喷等不利现象[1-2]。
液位信息的获取是实现液量监测的技术手段之一,药箱的液位监测面临液面波动剧烈、药液的理化特性各异、药箱空间小、防腐蚀要求高等问题。传统液位监测方法受到诸多局限[3-4],较难满足植保无人机药箱液位监
测的需要。例如:差压式液位测量[5]的系统构造复杂,且较长的连接管路不适合安装在体积较小的植保无人机药箱内;浮体式液位测量[6-9]、光电式液位测量[10-12]和机器视觉法测量[13-15]液位的装置体积、质量较大,安装于结构非常紧凑的植保无人机药箱面临诸多困难;电容式液位测量[16-18]、电极式液位测量[19-21]适用于导电特性稳定、且黏性较小的液体,且两者的标定工作较为复杂;超声波液位测量[22]、激光液位测量[23-24]存在盲区,需要距离液面一定高度才能正常使用,这类装置的安装条件会减少本就有限的载药量。此外,超声波及激光测距传感器设备的抗腐蚀抗污染能力较差,挥发性的液体可能在传感器探头表面凝结,药液晃动时易沾到传感器会使其受到侵蚀极易造成传感器数据异常甚至失灵[25]。李加念等[26]用压力变送器测量了蓄水池的液位信息,由于水位较高,池低液压不会因环境气压变化出现较大偏差,取得了不错的效果。但植保无人机药箱体积小,总液位较低,环境大气压影响不可忽略,且压力变送器质量较大,因此,需要针对植保无人机药箱的特点,研发适用于植保无人机药箱液位、液量监测的方法和装置。
此外,现有常见的植保无人机药箱液量监测技术有流量计法和流量估算法。流量计法是根据满箱时固定液量或设定的液量减去流过流量计的液量进行剩余液量估计,需要在每次作业之前进行手动输入载药量。流量估算法是根据经过地面测试的喷嘴液体流速和作业时间推算消耗的液量,同样需要明确初始总液量。若因故障暂停而中途加药使得起飞前初始总液量发生变化时就会造成测量误差。
本文拟结合植保无人机作业的特点及其药箱的特殊性,设计一种适合植保无人机的质量轻、功耗小、精度高、耐腐蚀的药箱液量监测装置,并制作样机进行实际应用测试试验,为实现植保无人机精准施药提供参考。
1 植保无人机药箱液量监测装置的设计
1.1 总体设计方案
现有研究对植保无人机药箱液位监测装置中需要应对的问题进行了较全面的阐述[2],包括液面波动剧烈、机身倾斜工况多、药液的理化特性各异、药箱空间小、防腐蚀要求高、功耗要求小等问题。针对植保无人机药箱液量监测装置设计中需要克服的难题,结合植保无人机作业时的实际情况,本文提出一种双气压式液量无线监测装置的设计方案。该装置包括液量监测器1、液量信息转发器3、空心管4、地面监控器5以及用于标定的流量传感器6等,如图1a所示。
1. 液量监测器2. 供电与通信电缆3. 液量信息转发器4. 空心管5. 地面监控器 6. 流量传感器7. 流量标定线缆8. K1校正按键9. K2校正按键10. 植保无人机 11. 药箱
1. Liquid quantity monitor 2. Power supply and communication cable 3. Liquid quantity information transponder 4. Hollow tube 5. Ground monitor 6. Flow sensor 7. Flow calibration cable 8. K1 correction button 9. K2 correction button 10. Spraying UAV 11. Pesticide tank
a.双气压式液量无线监测装置设计方案示意图
a. Design schematic diagram of dual-pressure liquid quantity wireless monitoring device
1. 环境气压通气孔 2.铝制顶盖 3.存储器 4,11.气压传感器5. 电路基板 6. 供电通信接口7. 处理器 8. 密闭气室 9. 铝制底壳 10. 空心管接口 12. 流量标定数据接口 13. 陀螺仪 14. 电源指示灯
1. Vent of atmosphere pressure 2. Aluminum cap 3. Storage 4, 11. Air pressure sensor 5. Circuit board 6. Power supply and communication interface 7. Processor 8. Closed chamber 9. Aluminum base 10. Hollow tube interface 12. Flow calibration data interface 13. Gyroscope 14. Power indicator light
b. 双气压式液量监测器结构图
b. Structure diagram of dual-pressure liquid quantity monitor
图1 双气压式液量无线监测装置
Fig.1 Dual-pressure liquid quantity wireless monitoring device
在药箱的合适位置安装液量监测器,空心管的一端与液量监测器连接,该连接端不低于被监测容器的满箱位置水平线;空心管的另一自由端与被监测药箱的空箱位置水平线齐平,并避免堵塞。液量信息转发器为液量监测器提供电能同时通过无线通信链路转发液量信息至地面监控器。地面监控器可实时显示剩余液量信息。
流量传感器与液量监测器的流量标定数据接口连接,仅在标定阶段使用,用于液位-液量的换算标定,以解决药箱形状、大小各异的问题,使该监测装置最大程度适用于各类不同药箱的安装和使用。
1.2 双气压式液量监测器
监测器由环境气压通气孔1、铝制顶盖2、存储器3、气压传感器4,11、电路基板5、供电通信接口6、处理器7、空心管接口10、流量标定数据接口12、陀螺仪13、电源指示灯14等组成,如图1b所示。
将存储器AT24C08(CATALYST公司生产的8192位的串行电可擦写可编程只读存储器)、MS5611气压传感器(MEAS推出的SPI和I²C总线接口的气压传感器)、STM32F103处理器(意法半导体生产的32位处理器)、供电通信接口、流量标定数据接口、微机械陀螺仪(MPU6050系列)、电源指示灯焊接在电路基板上,其中MS5611选用内置处理器的采集器模块,其采样输出频率为10 Hz。气压传感器一位于电路基板顶面,与铝制顶盖的环境气压通气孔相通,保证了气压传感器与外部空气联通,用于监测环境大气压。空心管接口为外径4 mm的全金属直通外螺纹接头,嵌入到铝制底壳侧壁,用于外接内径4 mm的空心管,空心管连通密闭气室,与空心管内液面形成密闭空间。气压传感器二位于电路基板底面,检测电路基板与底壳无缝黏合形成的密闭气室内气压。
1.3 液量信息转发器
液量监测器安装于植保无人机上,为了方便查看药箱液量信息和进行断点续喷等二次开发利用,设计了既可以单独为液量监测器供电又可将液量信息发送到地面站或输出至飞控的液量信息转发器。转发器包括电池、电量监测模块、2.4 G无线数传模块和充电电路。电池选用3.7 V (1 000 mAh)锂电池,在40 mA的额定工作电流下,可支持液量监测器工作25 h。数传模块选择成都泽耀科技有限公司研发的AS14-TTL型号(核心芯片为NRF24L01)的大功率无线串口,支持定频定点模式传输。
1.4 地面监控器
地面监控器主要用于显示药箱液量信息,包括液量显示模块、无线数传接收器模块和电池等部分。接收器与转发器的无线数传模块配对连通。为了可视化显示药箱中的液量信息,设计了10级液量指示灯:0,10%,20%……100%。与转发器类似,同样内置大容量锂电池,配有标准充电保护和电量监测电路。为了方便地面计算机采集数据,提供了液量信息输出接口,如图2所示。
1.5 液量信息的校准与标定
1.5.1 环境大气压变化的校准
由于液量监测器中气压传感器二监测的密闭气室气压是相对于环境气压测得的,在不同环境气压下,气压传感器二测得的气压值与真值存在差距,故需要获得环境大气压对其进行实时校准,校准方法如下:气压传感器一监测环境大气压P,气压传感器二监测药箱液面与空心管围闭形成的密闭气室的气压P,该气压值受液位高度和环境大气压影响。
为了消除环境大气压的影响,采用差值法间接建立液位高度与密闭气室中气压的相关关系。该气压差值为:
P=P- P(1)
式中P为环境大气压值,P密闭气室的气压值,hPa。
采用上述双气压传感器方法的好处在于:用气压差值来反演液位高度信息,可减小环境气压变化引起的测量结果不稳定;空心管的伸入式监测方法不会占用原本紧凑的药箱内部空间,解决了药箱空间小对监测装置体积约束的问题;由于传感器不需要直接与被测液体接触,可较好地解决农药或助剂对传感器的腐蚀和污染问题。
1.5.2 液面震荡及机身倾斜干扰的校正
植保无人机作业过程中,药箱液位不仅是动态变化的,还会受到多种干扰:一是阵风干扰、地头转弯调头等特殊工况下,液面易出现较剧烈的波动,对液位测量的结果造成干扰;二是植保无人机在前进、后退、左移、右移等飞行姿态中通常机身呈倾斜状态,需要对机身倾斜角引起的液位测量误差进行校正。
针对液面震荡干扰,拟采用低滞后的混合数字滤波算法进行滤除处理;针对机身倾斜干扰,拟采用基于微机械陀螺仪的液位校正算法进行校正处理。
1)混合数字滤波算法
数字滤波算法是滤除噪声干扰,提高测量精度的有效方法之一[27-28]。目前常见的数字滤波算法主要有限幅滤波法、中位值滤波法、算术平均滤波法[29]、递推平均滤波法[30]、中位值平均滤波法、限幅平均滤波法[31]、一阶滞后滤波法、加权递推平均滤波法、消抖滤波法、限幅消抖滤波法[32]等,但每种算法都有其自身的优缺点,通常要在其适用的条件下才能发挥较好的作用,否则仍然会有较大的误差出现[33]。杨运经等[34]采用了中位值平均滤波法滤除液面晃动干扰,但会存在数据滞后问题。
结合植保无人机药箱液位监测的特点,本文将中位值平均滤波法与滑动平均滤波法融合,提出一种混合数字滤波算法,该算法流程如下:连续采样个数据,去掉一个最大值和一个最小值,然后计算(-2)个数据的算术平均值;在这个数组末位加入新采集的2个数据,再进行一次去最大值最小值,然后求得平均值作为新的计算结果,计算结果滞后性较小;依次类推。值的选取范围为3~14,本文取=10。
2)基于微机械陀螺仪的机身倾斜校正算法
基于微机械陀螺仪的机身倾斜校正算法的原理如下:如式(1)所示,以密闭气室的气压P和实时环境气压P为主变量,陀螺仪硬件实测的机身(药箱)角度作为校正参量,先根据式(1)计算出P与P的差值,然后再经过微机械陀螺仪角度校正后得到新的气压差值,用校正后气压差值参与数字滤波计算。
如图3a所示,液量监测器安装时,确保其水平面与机身悬停时的平面平行,液量监测器内陀螺仪轴与飞行器偏航角平行,轴与飞行器俯仰角平行,轴与飞行器翻滚角平行,陀螺仪用于测量机身倾斜角。
1. 双气压式液量监测器 2. 药箱 3. 空心管 4. 液量监测器内部陀螺仪
1. Dual-pressure liquid quantity monitor 2. Pesticide tank 3. Hollow pipe 4. Internal gyroscope of liquid quantity monitor
注:轴与无人机翻滚角平行;轴与无人机俯仰角平行;轴与无人机偏航角平行;1表示实际液面;2表示药箱倾斜液面;1表示实际液位;2表示药箱倾斜实测液位;1表示实际液位与实测液位夹角,(º);2表示机身倾角,机身倾角等于药箱倾角,(º)。
Note:axis is paralleled with rolling angle of aircraft;axis is paralleled with pitch angle of aircraft;axis is paralleled with yaw angle of aircraft;1 represents actual liquid surface;2 represents liquid surface when pesticide tank is tilted;1represents actual liquid level;2represents measured liquid level of tilted pesticide tank;1represents angle of actual liquid surface and liquid surface when pesticide tank tilted, (º);2represents inclination of fuselage, equaled to inclination of pesticide tank, (º).
图3 液量监测器安装方式和药箱水平及倾斜时药箱液位动态监测示意图
Fig.3 Installation mode of liquid quantity monitor and schematic diagram of dynamic monitoring liquid level when pesticide tank is horizontal and tilted
图3b为植保无人机水平或倾斜时的药箱液位监测图,1为实际液位高度;2为机身发生倾斜时液量监测器实测的液位高度。从图3b中可知,机身(药箱)倾角2与实际液位和实测液位的夹角1相等,实测液位高度2与实际液位高度1的关系为

液量监测器的实测密闭气室气压P为
(3)
式中为液体密度(具体药液密度),kg/m³;为重力加速度,m/s2;2为药箱倾斜实测液位,mm;1为实际液位,mm;为空心管横截面积,mm2。
1.5.3 液位-液量的换算标定
目前,用于植保无人机的药箱形状主要有方形、矩形、碟形、圆锥形以及其他为了适应机身构架的不规则药箱形状,不同类型的植保无人机的药箱大小不一、形状规格不同,使得药箱的液位与液量之间的关系也存在不确定性。为了使液位监测装置最大程度适用于各类不同药箱的液量监测,设计了液位-液量换算标定的方法,如图4a所示。
关闭药箱出口,在药箱中加入药液至满箱,并水平放置药箱;将流量传感器连接至液量监测器的流量标定数据接口,打开药液出口阀门,液量监测器开始测量液位百分比;药液流过流量传感器时,会发送脉冲至液量监测器,监测器检测到脉冲触发信号后自动进入流量检测计数中断服务程序,根据满箱状态下总流量减去每个液位百分比对应的已流流量,得到剩余液量与液位百分比的数据对照表,将其固化保存到存储器中;在后续作业中进行液量监测时,直接查询该对照表,即可实现液位-液量的换算。
本文所用流量传感器为基于磁信号的YF-S401霍尔式流量传感器(佛山市顺德区中江节能电子有限公司生产,单脉冲精度0.17 mL),主要由塑料阀体、转子组件和霍尔传感器组成。其性能参数如表1所示。
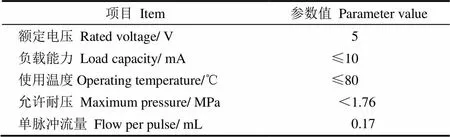
表1 流量传感器参数
1.6 植保无人机作业中液量信息监测方法
液量监测器安装时,保证其位资与植保无人机机身悬停时水平面平行。
当药箱内没有药液时,空心管的液位高度=0,按下地面监控器空箱校正按键,通过无线通讯方式将校正指令由转发器发送至液量监测器,液量监测器的气压传感器同时获取当前环境大气压值P和当前密闭气室气压P1,此时,密闭气室与环境大气连通,故有
P1=P (5)
空箱时的气压差值记为10。当药箱装满药液时,其液位高度为,由于液柱的压缩作用,密闭气室内气压大于环境大气压强,满箱时密闭气室内气压记为P2,根据式(1)计算出气压差值2,按下地面监控器满箱校正按键,通过无线通讯方式将校正指令由转发器发送至液量监测器,液量监测端存储当前气压差值2。
在喷洒作业过程中,动态变化的药箱液位高度为2,同样方法得出动态气压差值3。
(7)
测得动态气压差值3后,经过前述的液面震荡及机身倾斜干扰的校正处理后,得到经过校正的31,并计算得出药箱的液位百分比
根据液位百分比,查询该药箱的剩余液量与液位百分比的数据对照表,换算出目前的液量信息。
2 测试试验与结果分析
根据前述设计方案制作了药箱液量监测器样机,图5为整体样机实物图。液量监测器样机性能指标如下:额定工作电压为5 V,质量为40 g,功耗为0.2 W。
为了验证前述的双气压式液位监测、药箱液面震荡干扰滤波、机身倾斜干扰校正以及液位-液量换算模型等方法,设计了相关的验证试验进行性能测试。
2.1 药箱液位高度的实验室静态测试试验
该测试试验步骤如下:采用50 mL容量的量筒(静态满液位高度为125 mm),量筒静置于水平桌面上。将液量监测器样机水平安置于量筒顶部,空心管伸入量筒,使其末端与量筒底部基本水平。使用1 mL规格的滴管摄取量筒内液体使其液位高度每次减少2.5 mm(单次摄取1 mL),记录液量监测器采集到的动态气压差值。
如图6所示,液量监测器采集到的气压差值随着液位降低而较小,当液位高度为125 mm时,气压差值为10.2 hPa;当液位高度为0 mm时,气压差值为0 hPa,拟合曲线为=0.080 6+0.431 5,2=0.998 9,液量监测器采集到的气压差值与液位高度呈显著的线性负相关关系,表明可以利用气压差值来反演液位信息。

图6 动态的气压差值与实际液位的关系
2.2 药箱液面震荡干扰的滤波测试试验
该测试试验步骤如下:在10 L的药箱中装满水,施加不规则大小的外力,模拟植保无人机飞行中所产生的液面震荡,液量监测器的测得双气压的气压差值,采样频率为10 Hz,测量时间30 s。滤波前后气压差值的对比如图7所示。
图7 药箱液面震荡的气压差值滤波测试结果
上述测试中,液面静止时,液量监测器测得双气压的气压差值为9.82 hPa(真实值),滤波处理前后的平均值分别为10.15和9.79 hPa。对图8中的数据统计分析后得出,滤波前气压差值的变异系数为28.45%,滤波后气压差值的变异系数为12.27%,小于15%,且滤波后平均值更接近真实值,说明前述混合数字滤波算法表现良好。
该算法的优点是融合了中位值平均滤波法和滑动平均滤波法2种方法的优点,既能抑制随机干扰,又能滤除明显的脉冲干扰,具有较高的平滑度。植保无人机在田间掉头等工况下易出现液面震荡波动的情况,这种液面震荡波动既有随机性,又有脉冲波动特性,比较适合采用混合数字滤波算法进行处理。
2.3 静态机身倾斜干扰的校正测试试验
该测试试验步骤如下:在容量为8 L的方形药箱中装5 L水,将液量监测器样机水平安装于药箱顶部,空心管伸入药箱,使其末端与药箱空箱位置基本水平。模拟10°、15°、20°、30°共4种不同角度倾斜药箱,记录液量监测器测得各传感器的值如表2所示。
表2 药箱倾斜干扰校正前后数据对比
由表2可知,P环境大气压值稳定在1 001.09 hPa左右,药箱未受倾斜干扰时(倾斜角为0º)双气压差值测量值为8.43 hPa,而受到药箱倾斜干扰后气压差值测量值逐渐减小。根据陀螺仪角度校正后,气压差值最大误差从校正前的-1.09 hPa降低至校正后的0.05 hPa。可见,本文算法可以较好地消除植保无人机飞行中机身倾斜带来的药箱倾斜干扰误差。
2.4 圆锥形药箱液位-液量换算的标定试验
该测试试验步骤如下:
1)安装固定好支撑架,将药箱水平放置于固定架上,药箱底部外接出水管和阀门,阀门接霍尔流量传感器,阀门打开后,水可以通过流量传感器流入水桶。将液量监测器样机水平安装于药箱顶部,空心管伸入药箱,其末端与药箱空箱位置基本水平,使标有刻度的滴管最低点与药箱空箱位置持平,且底部出口与药箱出口连通,记录药箱满箱时滴管内液面所对应的刻度值。
2)对液位监测器进行空箱、满箱标定,标定完成后,使液量监测器进入实时监测模式,打开阀门,液体流过流量传感器,流量传感器发送脉冲到液量监测器,根据上文提出的液位-液量换算标定方法及流程得到100组液位百分比和剩余液量数据对照表。
3)在同一药箱内再次装满水,读取滴管中液面对应刻度所指示的高度,设定液量监测器根据所建数据表在液位每下降百分之一输出一次剩余液量,同时刻度滴管中总高度每下降百分之一记录流量计的已流出流量,再求与药箱总体积的差值,记为滴管测试剩余液量,将其作为真值,与液量监测器输出的液量进行比较,以分析判断液位-液量换算标定的准确性。
图8是圆锥型药箱液位-液量换算标定测试验结果,统计分析结果可知,滴管测试剩余液量曲线和液量监测器输出液量在前段接近直线,之后呈弧线,原因是锥形药箱上半部分(柱型)的液位与药箱内药液体积呈线性相关,从而液位与液量之间存在线性关系,而在下半部分(锥型)液位与药箱内药液体积呈非线性关系。2组数据相关系数为0.967。液量监测器输出剩余液量值相对于滴管测试剩余液量的最大误差为0.359 L,平均误差0.099 L,均方根误差为0.027 L,误差较小,利用液量监测器的液位-液量标定方法效果较好。
图8 圆锥型药箱液位和液量换算标定试验结果
2.5 植保无人机机载动态测试试验
试验机型为谷上飞3WDM4-10植保无人机(珠海羽人飞行器有限公司生产),其性能指标参数如表3所示。将液量监测器样机和转发器水平安装于药箱顶部,空心管伸入到药箱底部,使其末端与药箱空箱位置基本水平。为方便存储和处理数据,将地面计算机与地面监控器的输出接口连接,把液量监测器发回的原始数据和校正处理后数据存储于地面计算机,用于后续统计分析。
表3 3WDM4-10植保无人机参数
为了验证液量监测装置在植保无人飞机作业中不同工况条件下测量的准确性,设计了2、4、6 L共3种液量状态,分别在前进、后退、田间掉头移行等3种常见的飞行工况中进行测试,飞行速度为3 m/s。
图9为谷上飞3WDM4-10植保无人机安装效果,图10是谷上飞3WDM4-10植保无人机在2、4、6 L的载药量时,液量监测器输出的数据对比。经过校正处理后液量均值分别为1.985、3.942、5.984 L,经过校正处理后液量相对误差分别为0.75%、1.45%、0.77%,均方根误差分别为0.182、0.199、0.180 L。表4是在不同载药量时液量监测器监测到液量数据在校正前后的变异系数对比,从表4中可知,校正后变异系数明显小于校正前的变异系数,表明液量监测器可以有效滤除不同工况带来的干扰,液量监测装置的数据输出稳定可靠。
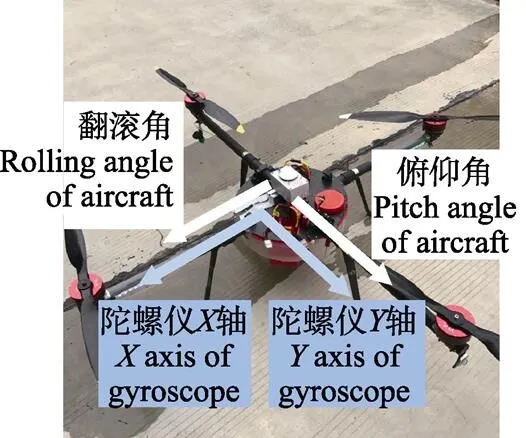
图9 液量监测器在3WDM4-10植保无人机上的安装方式
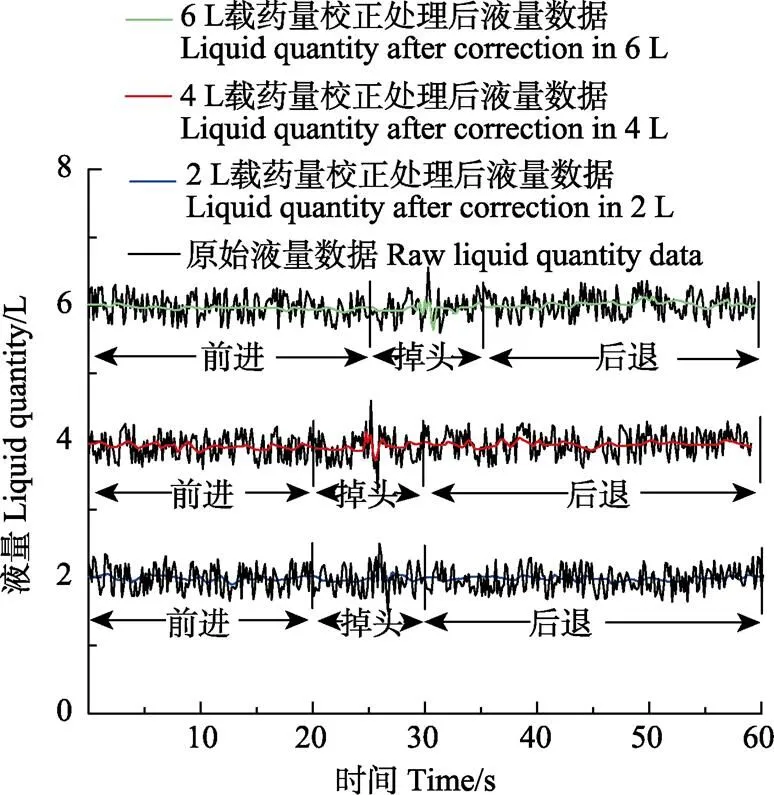
图10 3WDM4-10植保无人机液量监测试验结果

表4 3WDM4-10植保无人机液量监测数据校正前后变异系数
3 结论与讨论
根据植保无人机药箱的特点,为适应植保无人机作业的实际需要,提出了双气压式液量监测装置的设计方案,并进行了测试试验,结果表明:
1)采用同时监测环境气压和密闭气室内气压的双气压式差值法,建立液位高度与气压差值之间的相关关系,决定系数2为0.998 9,可有效消除环境气压变化对测量精度和稳定性带来的影响。
2)针对液面震荡干扰,设计了混合数字滤波算法,同时融合了中位值平均滤波法与滑动平均滤波法的优势,使药箱液位数据的变异系数由滤波处理前的28.45%降低到12.27%,对液面震荡干扰具有较好的滤波效果;针对机身倾斜干扰,设计了基于微机械陀螺仪的校正算法,在机身倾斜30°时,误差从校正前的-1.09 hPa,降低至校正后的0.05 hPa,可较好地消除植保无人机飞行中机身倾斜带来的药箱倾斜干扰误差。
3)在植保无人机机载动态测试试验中,设计了前进、后退、田间掉头移行等3种常见的飞行工况中进行测试,在2、4、6 L的载药量时,液量监测器输出的液量数据均值分别为1.985、3.942、5.984 L,经过校正处理后液量相对误差分别为0.75%、1.45%、0.77%,均方根误差分别为0.182、0.199、0.180 L,表明液量监测器在不同实际作业工况中的数据输出较稳定可靠。
本文所述方法较好地解决了现有液位监测装置由于机械结构复杂、装置庞大、安装不便、成本过高、通用性能差等特点而难以在植保无人机液位监测中应用的问题,并实现了液位-液量的精确换算,但测量精度还有较大的提高空间,因此还需对此进行更深一步的研究。
[1] 周志艳,姜锐,罗锡文,等. 一种液位监测装置及方法[P]:CN105716685A. 2016-06-29.
[2] 周志艳,姜锐,罗锡文,等. 液位监测方法综述及其在植保无人机中的应用[J]. 农业机械学报,2017,48(4):1-9. Zhou Zhiyan, Jiang Rui, Luo Xiwen, et al. Application analysis of liquid-level monitoring technology to plant protection UAV[J]. Transactions of the Chinese Society of Agricultural Machinery, 2017, 48(4): 1-9. (in Chinese with English abstract)
[3] 童鑫,韩成成,卢翌. 汽车油箱液位测量技术研究[J]. 电子科技,2012,25(8):144-146. Tong Xin, Han Chengcheng, Lu Yi. Technology for automobile fuel tank level measurement[J]. Electronic Science and Technology, 2012, 25(8): 144-146. (in Chinese with English abstract)
[4] 张建杭. 简析汽车油箱液位测量技术[J]. 电子世界,2014(9):26-27. Zhang Jianhang. Analysis of automobile fuel tank liquid level measurement technology[J]. Electronic World, 2014(9): 26-27. (in Chinese with English abstract)
[5] 任开春,涂亚庆. 20余种液位测量方法分析[J]. 工业仪表与自动化装置,2003(5):12-16. Ren Kaichun, Tu Yaqing. Analyzing more than 20 methods relating to liquid level measurement[J].Industrial Instrumentation & Automation, 2003(5): 12-16. (in Chinese with English abstract)
[6] 李丽宏,谢克明. 液位自动检测的现状与发展[J]. 太原理工大学学报,2001,32(4):417-420. Li Lihong, Xie Keming. Status and development of automatic liquid level detection[J]. Journal of Taiyuan University of Technology, 2001, 32(4): 417-420. (in Chinese with English abstract)
[7] 姚宇翔. 浮子式液位测量系统的研制[D]. 哈尔滨:哈尔滨工业大学,2007. Yao Yuxiang. Development of Float Type Liquid Level Measuring System[D].Harbin: Harbin Institute of Technology, 2007. (in Chinese with English abstract)
[8] 王英亮. 分段式液位测量变送器的研究[D]. 哈尔滨:哈尔滨工业大学,2006. Wang Yingliang. Research on Segmented Liquid Level Measuring Transmitter Based on Segmented Liquid Level Transmitter[D]. Harbin: Harbin Institute of Technology, 2006. (in Chinese with English abstract)
[9] 葛君山. 液位检测技术的现状与发展趋势[J]. 船电技术,2013,33(2):43-45. Ge Junshan. Present situation and development trend of liquid level detection technology[J].Ship Electric Technology, 2013, 33(2): 43-45. (in Chinese with English abstract)
[10] 熊先才,章鹏,苻欲梅,等. 光电液位传感器及其在桥梁挠度自动测量中的应用[J]. 地震工程与工程振动,2006,26(4):260-264. Xiong Xiancai, Zhang Peng, Fu Yumei, et al. Photoelectric liquid level sensor and its application in automatic measurement of bridge deflection[J]. Earthquake Engineering and Engineering Vibration, 2006, 26(4): 260-264. (in Chinese with English abstract)
[11] 范准峰,莫健华,高永强,等. 基于光电位置传感器的激光液位检测系统研究[J]. 仪表技术与传感器,2006(12):44-45. Fan Zhunfeng, Mo Jianhua, Gao Yongqiang, et al. Research of laser liquid level detection system based on photoelectric position sensor[J]. Instrument Technique and Sensor, 2006(12): 44-45. (in Chinese with English abstract)
[12] Paulo A, Dias Jo O, Paix O Tiago, et al. Liquid level gauge based in plastic optical fiber[J]. Measurement, 2015, 66: 238-243.
[13] 孟磊,邹志云,郭宇晴,等. 机器视觉在化工过程液位检测中的应用研究[J]. 石油化工自动化,2015,51(4):39-43. Meng Lei, Zou Zhiyun, Guo Yuqing, et al. Design and research of liquid level measurement device based on linear array CCD[J]. Automation in Petro-Chemical Industry, 2015, 51(4): 39-43. (in Chinese with English abstract)
[14] 刘薇娜,谢国红. 基于CCD的激光三角位移法测液位的性能研究[J]. 自动化仪表,2010,31(7):19-21. Liu Weina, Xie Guohong. Study on measurement of liquid level based on laser triangulation displacement method based on CCD[J]. Automatic instrument, 2010, 31(7): 19-21. (in Chinese with English abstract)
[15] Lorenz M G, Mengibar-Pozo L, Izquierdo-Gil M A. High resolution simultaneous dual liquid level measurement system with CMOS camera and FPGA hardware processor[J]. Sensors and Actuators A: Physical, 2013, 201: 468-476.
[16] 唐正茂,王惠玲,刘志远,等. 一种电容阵列式液位传感器的设计与实现[J]. 传感器与微系统,2010,29(3):89-91. Tang Zhengmao, Wang Huiling, Liu Zhiyuan, et al. Design and implementation of a capacitance array liquid level sensor[J]. Sensors and Microsystems, 2010, 29(3): 89-91. (in Chinese with English abstract)
[17] 张曹龙. 电容式液位计信号变换电路研究与设计[D]. 成都:电子科技大学,2013. Zhang Caolong. Research and Design of Signal Conversion Circuit for Capacitive Level Meter[D]. Chengdu: University of Electronic Science and technology of China, 2013. (in Chinese with English abstract)
[18] Daniel P, Grzegorz T, Marzęcki M, et al. The capacitive sensor for liquid level measurement made with ink-jet printing technology[J]. Procedia Engineering, 2015, 120: 731-735.
[19] 胡振国. 电极式液位计的制造[J]. 电镀与环保,1993(1):30-31. Hu Zhenguo. The manufacture of electrode type liquid level meter[J]. Electroplating and Environmental Protection, 1993(1): 30-31. (in Chinese with English abstract)
[20] Ramon C, Oscar C, Ramon P-A. Continuous liquid level measurement using a linear electrode array[J]. Measurement Science and Technology, 2007, 18(7): 1859-1866.
[21] Gong C S A, Chiu H K, Huang Liren, et al. Low-cost comb-electrode capacitive sensing device for liquid-level measurement[J]. IEEE Sensors Journal, 2016, 16(9): 2896-2897.
[22] 李扬. 基于超声波测距的船舶液位检测系统[D]. 重庆:重庆大学,2012. Li Yang. Ship Level Detection System Based on Ultrasonic Ranging[D]. Chongqing: Chongqing University, 2012. (in Chinese with English abstract)
[23] 张艳,程春梅. 激光液位传感器在炸药装药中的检测应用[J]. 测试技术学报,2008,22(2):184-188. Zhang Yan, Cheng Chunmei. Application of laser liquid level sensor in explosive charge[J]. Journal of Test Technology, 2008, 22(2): 184-188. (in Chinese with English abstract)
[24] 何勇,莫健华,范准峰. 光固化快速成形中激光液位检测系统的设计[J]. 激光杂志,2007,28(4):79-80. He Yong, Mo Jianhua, Fan Zhunfeng. Design of laser liquid level detection system in stereolithography[J]. Journal of Lasers, 2007, 28(4): 79-80. (in Chinese with English abstract)
[25] 薛晓红,韩春霞. 不稳定液位的检测[J]. 重庆电子工程职业学院学报,2011,20(2):163-165. Xue Xiaohong, Han Chunxia. Detection of unstable liquid level[J]. Journal of Chongqing Electronic Engineering Career Academy, 2011, 20(2): 163-165. (in Chinese with English abstract)
[26] 李加念,洪添胜,倪慧娜. 基于太阳能的微灌系统恒压供水自动控制装置研制[J]. 农业工程学报,2013,29(12):86-93. Li Jianian, Hong Tiansheng, Ni Huina. Constant pressure water supply automatic device designed for micro-irrigation system based on solar energy[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(12): 86-93. (in Chinese with English abstract)
[27] 王宗锐,黄向东,何小红,等. 数字滤波在油井液面测试中的应用[C]//仪表,自动化及先进集成技术大会,2007. Wang Zongrui, Huang Xiangdong, He Xiaohong, et al. Applications of digital filter in measuring oil wells[C]// Instrumentation, Automation and Advanced Integration Technology Conference, 2007. (in Chinese with English abstract)
[28] 彭先洪,姚云茂,何共建,等. 数字滤波技术在精密测量仪表中的应用研究[J]. 国外电子测量技术,2009,28(11):60-62. Peng Xianhong, Yao Yunmao, He Gongjian, et al. Research on the application of digital filtering technology to accurate measuring instrement[J]. Foreign Electronic Measurement Technology, 2009, 28(11): 60-62. (in Chinese with English abstract)
[29] 李芹,王伟,彭道刚. 过程控制测量信号数字滤波方法优化[J]. 实验室研究与探索,2016,35(4):26-29. Li Qin, Wang Wei, Peng Daogang. Optimization of the filtering methods for process control measuring signals[J]. Research and Exploration in Laboratory, 2016, 35(4): 26-29. (in Chinese with English abstract)
[30] 杨明,狄卫国,段淑凤. 数字滤波技术及其在电池检测系统中的应用[J]. 现代电子技术,2003(5):98-99. Yang Ming, Di Weiguo, Duan Shufeng. Digital filter algorithms used in detected system for battery[J]. Modern Electronic Technology, 2003(5): 98-99. (in Chinese with English abstract)
[31] 文常保,高丽红,方吉善,等. 基于改进型限幅平均滤波法的高精度称重系统研究[J]. 传感技术学报,2014,27(5):649-653. Wen Changbao, Gao Lihong, Fang Jishan, et al. The high-precision weighing system based on the improved amplitude-limiting and average filtering algorithm[J]. Chinese Journal of Sensor and Actuators, 2014, 27(5): 649-653. (in Chinese with English abstract)
[32] 郑涛,石秀华,许晖. 数字滤波新方法尝试与验证[J]. 测控技术,2004,23(4):19-20. Zheng Tao, Shi Xiuhua, Xu Hui. New method and its feasibility analysis to digital filtering[J]. Measurement & Control Technology, 2004, 23(4): 19-20. (in Chinese with English abstract)
[33] 杨剑,刘光斌. 单片机系统中应用的几种数字滤波方式[J]. 微计算机应用,2006,27(1):114-116. Yang Jian, Liu Guangbing. Several ways of digital filtering application in MCU system[J]. Microcomputer Applications, 2006, 27(1): 114-116. (in Chinese with English abstract)
[34] 杨运经,张社奇,时新玲. 智能水位测控仪在节水灌溉系统中的开发与应用[J]. 农业工程学报,2009,25(11): 178-182. Yang Yunjing, Zhang Sheqi, Shi Xinling. Development and application of the intellectual water level monitor in the water-saving irrigation system[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2009, 25(11): 178-182. (in Chinese with English abstract)
Design and experiment of liquid quantity monitor for pesticide tank in spraying UAV
Jiang Rui1,2, Zhou Zhiyan1,2,3※, Xu Yan1, Lan Yubin1,2, Luo Xiwen1,2
(1.510642,; 2.510642; 3.410128)
The liquid quantity data is one of the most important information to spraying UAV(unmanned aerial vehicle). During the aerial spraying, the liquid quantity in the pesticide tank is dynamic, the operators have always to paid attention to the liquid quantity so that they can make suitable decisions for the flight controlling. Therefore, the liquid quantity monitoring method for pesticide tank is the most important in UAV spraying operation. However, other special characteristics need to be evaluated in order to achieve real-time monitoring the amount of pesticide liquid of spraying UAV, including unstable liquid surface, variation of physical and chemical properties of different pesticides, shapes of different tanks, the anti-corrosion requirements, tank sizes, etc. In this paper, we aimed to explore the feasible method for liquid quantity monitoring of pesticide tank in spraying UAV. Based on the above characteristics, we developed a solution called dual-pressure liquid quantity monitoring system, which consisted of double pressure sensors for liquid-level monitor, wave filter for liquid level turbulence (i.e.va combination of the median filter and the moving average filter), liquid level correction for aircraft on a tilt (based on a gyroscope), and conversion model for liquid level and liquid quantity. In order to verify the feasibility of the proposed method, a prototype of liquid monitoring device was developed, and the relevant verification test was conducted to test its performance. The experimental results showed that there was a significant (< 0.05) linear negative correlation between the liquid level and pressure difference (between ambient atmospheric pressure and sealed air chamber pressure caused by liquid level), and the correlation coefficient2was 0.9989. It showed that the dual-pressure method can effectively eliminate the influence of ambient atmospheric pressure changes on the measurement accuracy and stability. By using the proposed wave filter, the C.V. (coefficient of variation) of liquid level data decreased from 28.45% to 12.27%, indicating that the proposed wave filter can filter off the liquid level turbulence effectively. By using liquid-level correction for aircraft on a tilt, the error was reduced to 0.05 from -1.09 hPa when the aircraft tilt up to 30°. Therefore, the proposed tilt correction method can effectively eliminate the error caused by aircraft body tilt. In order to test the performance of prototype of liquid quantity monitor in the actual spraying operation, the test based on a spraying UAV, 3WDM4-10, was conducted. The test included three different flying attitudes, forward, backward and turn around at the edge of field. When the payload of the pesticide tank was 2, 4 and 6 L, the mean liquid quantity data out by the liquid quantity monitor were 1.985, 3.942, and 5.984 L, the relative errors of the liquid quantity monitor were 0.75 %、1.45%、0.77%, the RMS error was 0.182, 0.199 and 0.180 L, respectively. The results demonstrated that the output of the proposed liquid quantity monitor is stable and reliable in different flying attitude.
unmanned aerial vehicles; design; experiments; agricultural aviation; pesticide tank; liquid quantity monitoring; wireless monitoring
10.11975/j.issn.1002-6819.2017.12.014
S252+.3
B
1002-6819(2017)-12-0107-09
2017-02-10
2017-05-10
广东省科技计划项目(2014B090904073,2014A020208103,2015B020206003);国家重点研发计划(2016YFD0200700)
姜 锐,男,山西晋中人,主要从事农业航空应用技术研究。广州 华南农业大学工程学院,510642。Email:469289264@qq.com.
周志艳,男(汉族),湖南永州人,教授,主要从事农业航空应用技术研究。广州 华南农业大学工程学院,510642。 Email:zyzhou@scau.edu.cn。中国农业工程学会会员:周志艳(E042100021M)
姜 锐,周志艳,徐 岩,兰玉彬,罗锡文. 植保无人机药箱液量监测装置的设计与试验[J]. 农业工程学报,2017,33(12):107-115. doi:10.11975/j.issn.1002-6819.2017.12.014 http://www.tcsae.org
Jiang Rui, Zhou Zhiyan, Xu Yan, Lan Yubin, Luo Xiwen. Design and experiment of liquid quantity monitor for pesticide tank in spraying UAV[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(12): 107-115. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.12.014 http://www.tcsae.org
