锥形轮体结构的覆土镇压器设计与试验
2017-07-18贾洪雷郑铁志
郭 慧,陈 志,贾洪雷,郑铁志,王 刚,王 奇
锥形轮体结构的覆土镇压器设计与试验
郭 慧1,2,陈 志2,3,贾洪雷1,2※,郑铁志4,王 刚1,2,王 奇1,2
(1. 吉林大学工程仿生教育部重点实验室,长春 130025; 2. 吉林大学生物与农业工程学院,长春130025;3. 中国机械工业集团有限公司,北京 100080; 4. 吉林省农业机械化管理中心,长春 130062)
为简化机具结构,同时解决传统播种作业过程中覆土及镇压作业稳定性不佳的问题,该文设计了一种兼具覆土和镇压功能的覆土镇压器,该装置由左右2个具有锥形结构的覆土镇压轮组成。通过对覆土镇压作业过程种沟土壤受力情况和运动过程的分析,明确了该装置的覆土和镇压作用机理,及覆土镇压器主要结构参数和作业参数(外径、覆土镇压器宽度、内倾角和载荷)的取值范围,同时确定了影响覆土和镇压性能的3个主要影响因素(外载荷、左右覆土镇压轮间距和内倾角)。通过三因素三水平Box-Benhnken试验,以作业后的覆土厚度和种沟上方距离地表5 cm处土壤紧实度为试验指标,得到了影响土壤紧实度的各因素的主次顺序为:载荷、左右覆土镇压轮间距、内倾角,影响覆土厚度的各因素的主次顺序为:内倾角、载荷、左右覆土镇压轮间距。通过Design-Expert软件获得了覆土镇压器最佳参数组合为:载荷900 N,左右覆土镇压轮间距为13 mm,内倾角为16°。最佳参数组合的验证试验得出,作业后种沟上方距离地表5 cm处土壤紧实度均值为(43.8±1.9) kPa,变异系数为4.3%;覆土厚度均值为(32.9±2.3) mm,变异系数为6.9%。满足既定的设计目标,且具有较好的作业稳定性,该研究可为播种机覆土镇压器的设计提供参考。
农业机械;设计;运动学;覆土;镇压;装置;试验
0 引 言
中国东北旱作农业区由于耕地垦殖时间长、耕作方式使土壤扰动频繁,使得耕地退化、土壤失墒严重、水土流失加剧,进而影响了播种作业质量。因此,通过对播种作业机具关键部件的研究和改进设计,可为机具性能的提高,及机具在作业过程中蓄水保墒能力的提高提供辅助性装备支撑[1-2]。
覆土和镇压是播种作业过程中的关键环节,作为东北垄作区播种作业的一项传统农艺技术措施,覆土作业应满足将种沟内的种子覆盖严密,并达到覆土量适宜和覆土均匀的目的[3-4]。镇压作业的作用是通过提高土壤紧实度,以使苗带土壤吸收水分能力增加,同时使种子与周围湿土密接,起到提墒、保墒和供墒作用。覆土和镇压作业的质量直接影响种子生长环境,进而影响作物的生长和产量[5-7]。
现有的覆土器主要有八字形板式、双圆盘式和挤压式3种,其中八字形板式覆土器,因其可根据垄型大小及覆土厚度不同而进行调节,广泛应用于东北垄作播种机[8];双圆盘式覆土器,因其具有覆土量大、覆盖严密和作业阻力小的特点,多用于玉米、大豆等行距较大的中耕作物播种机上。挤压式覆土器,集覆土与镇压功能于一体,由左右2个与地面成一定倾角的轮子构成,在国外免耕播种机上应用较多。用于播种机上的镇压器主要包括平面、凹面、凸面和锥面4种形式。此外,国内学者对覆土和镇压装置也展开了广泛的研究,刘选伟等[9]研究的双层圆盘式覆土器可减少覆土过程对种子的位移;董向辉等[10]研究的刮板式输送覆土器具有覆土量充足且均匀的性能;苟文等研究的套作模式下链环式覆土器覆土质量稳定优异[11];Ren等[12-13]研究的仿生镇压器可解决作业过程中的土壤粘附问题;罗红旗等[14]研究的组合镇压器可实现对垄沿及播种带的同时镇压;贾洪雷等[15-16]研究的仿形弹性镇压辊可解决镇压作业纵向和横向仿形问题。
目前对覆土镇压装置的研究多集中在覆土器和镇压器单个部件结构和作业性能上,或覆土镇压作业对作物生长和土壤墒情的研究上,而对覆土镇压一体机构,即覆土镇压器的研究相对较少[17-19]。常见的覆土镇压一体机构,即挤压式覆土镇压器,该覆土镇压器多为浅覆土作业,且因其采取2个挤土轮挤压土壤作业的方式,使得其在作业过程中因挤土轮与土壤接触面积较小而导致覆土和镇压作业稳定性不佳,不能满足传统播种作业对覆土和镇压作业的要求,因此常应用于免耕播种机上[8]。覆土镇压器因其集覆土和镇压功能于一体,在实现简化机具结构,提高机具作业稳定性的同时,还可实现覆土后及时镇压,从而有利于减少传统覆土和镇压作业过程中的水分蒸发,提高土壤墒情、保持土壤水分。为此,本文设计了一种具有锥形轮体结构的覆土镇压器,在解决传统播种作业过程中覆土及镇压问题的同时,具有较好的覆土和镇压作业稳定性。本文研究了载荷、左右覆土镇压轮间距、内倾角对作业后土壤紧实度和覆土厚度的影响,并寻找了各因素的最优组合。
1 覆土镇压器整体结构及其工作原理
锥形轮体结构的覆土镇压器,主要由轮架、轮轴、高度调节装置和2个对称布置的锥形覆土镇压轮组成,如图1所示。覆土镇压器的轮架通过螺栓与播种机具的机架板刚性连接,并可通过更换轮轴以实现左右覆土镇压轮间距的调整。覆土镇压器对种沟土壤的作用力如图2所示,坐标轴为水平地表方向,轴为与地表垂直方向,在作业过程中依靠左右2个具有锥形结构的覆土镇压轮所组合形成的倒“V”型倾斜面结构,以在作业过程中对种沟土壤产生挤压力F,进而实现覆土和镇压作业的同时进行,可以看出力F的大小主要与覆土镇压器的外径、载荷、覆土镇压器宽度和倾斜面结构相关[11]。
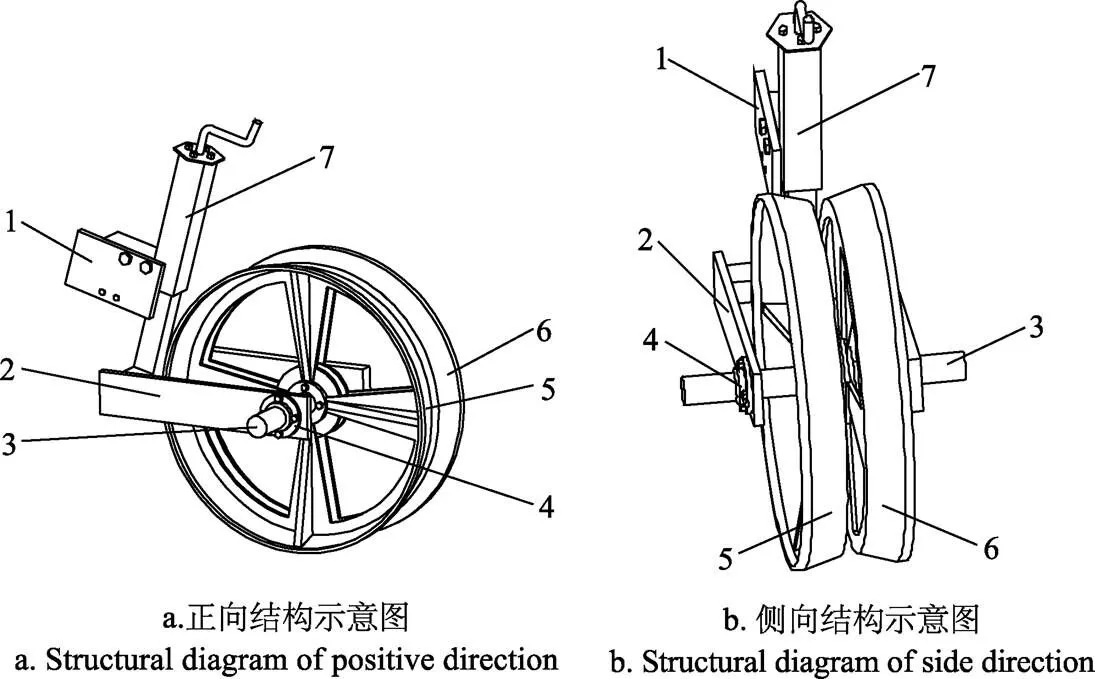
1. 机架板 2. 轮架 3. 轮轴 4. 轴承 5. 左覆土镇压轮 6. 右覆土镇压轮 7. 高度调节装置
覆土镇压器的结构参数和作业参数会对其作业质量产生显著的影响,因此需要合理设计并选择其结构和作业参数。本文覆土镇压器的设计,需要确定轮体的外径、宽度相关参数(包括单侧覆土镇压轮水平面宽度、单侧覆土镇压轮倾斜面宽度、左右覆土镇压轮间距)、内倾角、载荷等。
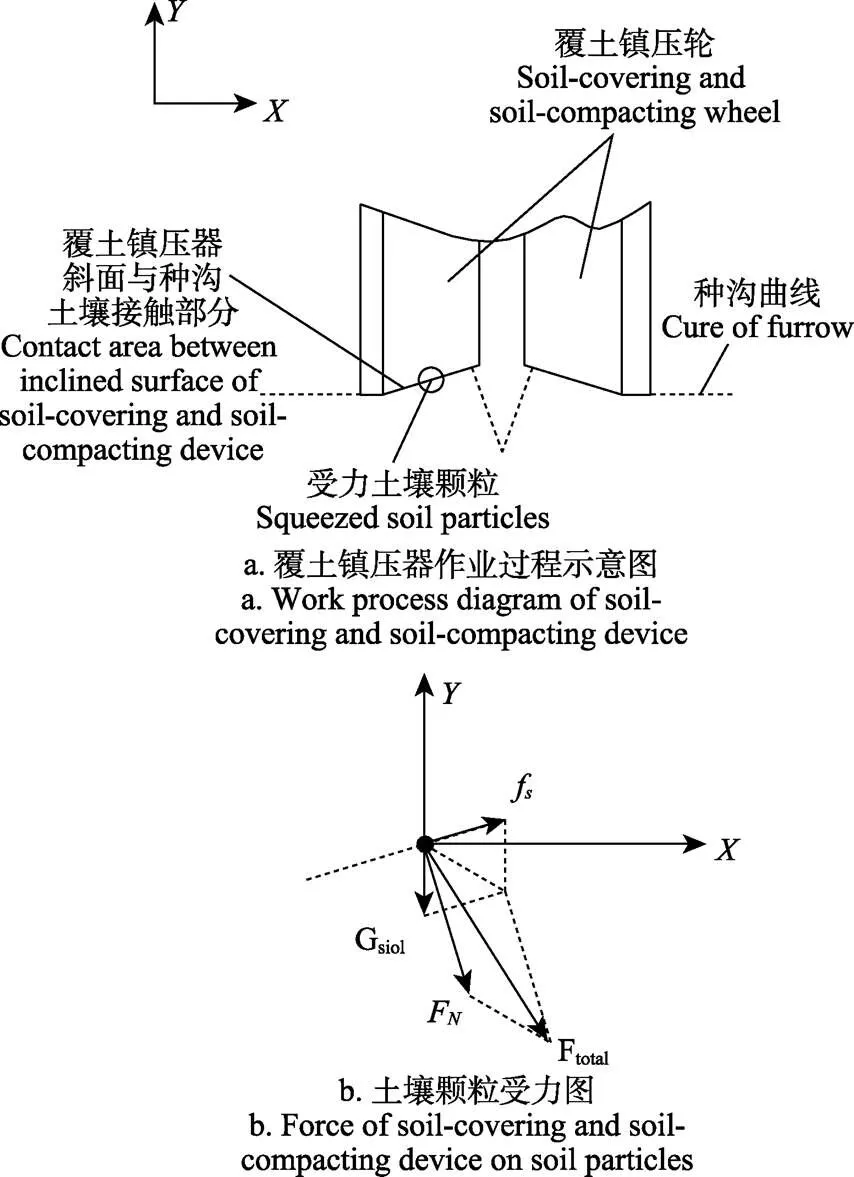
注:X、Y分别代表水平和垂直方向;fs为覆土镇压器对土壤颗粒沿其倾斜面的摩擦力,N;Gsoil为土壤颗粒自身重力,N;FN为覆土镇压器倾斜面对土壤颗粒的支持力,N;Ftotal为土壤颗粒在覆土镇压作业过程所受的合力,N。
2 覆土镇压器结构设计
2.1 覆土镇压器外径
覆土镇压器的直径直接影响镇压效果及滑移率,其直径越小,作业中的滑移率越大,同时易出现拖土和壅土现象,进而直接影响镇压和覆土效果。相反,其直径越大,越易传动,同时可减小作业过程中的滑移率,但过大的直径会增加作业过程中的滚动阻力。本文所设计的覆土镇压器,应用在播种机上,在满足排肥和排种传动轮正常传动的情况下[20-21],覆土镇压轮的外径1应满足:
式中w为带动排种、排肥部件所消耗的传动力矩,N×m;w为轴套中的摩擦力矩,N×m;为作用在覆土镇压器上的总载荷,N;为土壤对覆土镇压轮的摩擦系数,无量纲常数。
因此,由式(1),结合实际作业情况与经验[14],覆土镇压器的直径一般取300~600 mm为宜。在满足传动要求的情况下,为了尽可能减小作业过程中的滚动阻力,故本文覆土镇压器的外径选取为稍大于取值范围最小值即可,最终确定外径1为350 mm。
2.2 覆土镇压器宽度
本文所设计的覆土镇压器由左右2个具有锥形结构的覆土镇压轮对称布置而成,因此覆土镇压器的宽度与2个覆土镇压轮的结构参数直接相关。覆土镇压器宽度是由开沟宽度和播种垄距决定的,一般对于镇压器宽度而言,宽度过小易造成苗带下沉,在地表形成沟状;宽度过大,相同作业载荷下,会因镇压器与土壤接触面积增大而使其对土壤产生的压强减小,从而不能满足播种农艺对镇压力的需求[21-22]。由于本文设计的覆土镇压器通过左右2个对称布置的锥形轮体实现覆土和镇压功能,因此在同一内倾角(见图3)条件下,宽度越大,左右覆土镇压轮在作业过程中其倾斜面结构与种沟土壤接触面积越小。同时为了保证覆土镇压器的作业通过性,使其在作业过程中不因地表秸秆或土壤拥堵在左右覆土镇压轮相交处,故设置了左右覆土镇压轮间距3,如图3。结合上述2方面,为了保证覆土镇压器与种沟土壤的紧密接触,本文设计的覆土镇压器,可通过更换轮轴以调整左右2个覆土镇压轮在轮轴上的位置(即改变左右覆土镇压轮间距3的大小),以在一定范围内改变其实际作业宽度。其实际作业宽度为:
式中1为单侧覆土镇压轮水平面宽度,mm;2为单侧覆土镇压轮倾斜面宽度,mm;3为左右覆土镇压轮间距,mm。
覆土镇压器宽度的确定与开沟器开沟形状紧密相关,本文所采用的开沟器为双圆盘开沟器,其直径为380 mm,工作夹角为12°,圆盘聚点与水平直径的夹角为20°,开沟器入土深度为50 mm。通过开沟器的室内土槽开沟试验,对种沟形状进行测量,如图3,得到相关种床参数。
垄宽1为:

幅宽2为:
mm (4)
垄高2为:
开沟作业后的沟深1为:
(6)
式中xx、x分别为种沟土壤曲线上点、、对应的横坐标,mm;y为种沟土壤曲线上点对应的纵坐标,mm。
通常单侧覆土镇压轮倾斜面宽度2应满足稍大于苗幅宽度的一半,因此取2为70 mm。单侧覆土镇压轮水平宽度1的设置是为了保证轮体与水平地表有足够的接触面积,以保证其传动稳定性,故取1为20 mm。为了保证左右覆土镇压轮的倾斜面结构与种沟土壤的接触,左右覆土镇压轮间距3应满足:,即取3≤29 mm。
2.3 覆土原理与覆土镇压器内倾角
由农业土壤力学[23]可知,从动刚性镇压轮在松软的土壤上稳定运动时,可视为只有土壤发生形变,除受土壤机械特性影响外,还与轮体本身的结构和受力情况有关。为了实现覆土功能,需要使覆土镇压器在作业过程中与种沟土壤有足够的接触面积,且能使种沟两侧土壤有向种沟沟底运动的趋势,即覆土镇压器对种沟两侧土壤的作用力有指向种沟沟底的趋势。
基于以上分析,本文设计了一种具有锥形轮体结构的覆土镇压器,使覆土镇压器在作业过程中,左右2个具有锥形结构的覆土镇压轮与种沟土壤接触面成倾斜结构,利用其倾斜面结构与种沟土壤的相互作用,对种沟土壤产生有指向种沟沟底运动的趋势,以将种沟两侧土壤(1)挤压到种沟内部(3、4),最终实现覆土功能,如图3所示。为了保证一定的覆土厚度,在假设覆土作业过程中不考虑回土和壅土的情况下,由于作业过程中土壤压实现象的存在,会使图3中所示3和4区域内的土壤密度大于作业前位于种沟两侧1区域的土壤密度。因此,可推导出该装置满足覆土功能需有:
式中1为覆土作业前单侧种沟的堆土面积,其面积可用种沟曲线与覆土镇压轮外缘¢围成的面积表示,mm2;3为覆土作业后种沟内水平地表以上的堆土面积,其面积可用水平面以上种沟曲线、¢¢与水平面轴及镇压轮外缘曲线、¢围成的面积表示,mm2;4为覆土作业后,种沟内水平地表以下的堆土面积,其面积可用水平面以下种沟曲线、¢与水平面轴围成的面积表示,mm2。
本文采用的开沟器为双圆盘开沟器,其沟型特点如图3所示,以种沟土壤边缘曲线点为坐标原点,地面水平方向为轴,与地面垂直方向向上为轴。由图3左右覆土镇压轮结构参数与种沟曲线间的关系,可推导出:
(9)
(10)
式中为种沟土壤曲线上对应点的横坐标,mm;2为覆土镇压轮外缘、种沟曲线与水平面轴围成的面积,mm2;l'为覆土镇压轮外缘¢¢与种沟土壤接触点¢之间的距离,且cc¢=22+b,mm;为覆土镇压轮内倾角,即单侧覆土镇压轮倾斜面与水平方向的夹角,(°);f()、f()分为种沟土壤曲线段、段在图示坐标内的拟合方程,mm;x为种沟土壤曲线上点对应的横坐标,mm;l¢为轴上的开沟宽度,即种沟土壤曲线上点和点¢之间的距离,mm;1为开沟器作业后的深度,mm。
结合式(7)~(10),可知本文所设计的覆土镇压器内倾角、左右覆土镇压轮宽度和种沟形状直接影响其覆土性能,并可推导出使覆土镇压器满足覆土作业性能需有:

通过对种沟曲线段、段进行分段拟合,得拟合方程分别为:
(12)

结合公式(11)~(13),可确定本文所设计的覆土镇压器的内倾角约为≤18.67°。
2.4 镇压原理与覆土镇压器载荷
在播种单体铰接点的支持力和镇压轮轴承滚动阻力忽略不计的情况下,播种单体在作业时受的垂直作用力包括自身重力和弹簧压力、拖拉机通过机架作用于单体的拉力、开沟器工作阻力,土壤对覆土镇压器的反作用力¢[24],其中土壤对覆土镇压器的反作用力在垂直方向的分力Q与覆土镇压器对土壤的垂直载荷(即覆土镇压器载荷)互为作用力与反作用力,二者大小相等,方向相反,如图4所示。
注:G为播种单体在作业时受的垂直作用力,N;H为拖拉机通过机架作用于单体的拉力,N;R为开沟器工作阻力,N;Rx为开沟器工作阻力R沿水平方向的分力,N;Ry为开沟器工作阻力R沿垂直方向的分力,N;Q¢为土壤对覆土镇压器的反作用力,N;Qx为土壤对覆土镇压器的反作用力沿水平方向的分力,N;Qy为土壤对覆土镇压器的反作用力沿垂直方向的分力,N;φ为拖拉机通过机架作用于单体的拉力与水平方向的夹角,(°)。
对于刚性轮在非刚性路面上行走时,其接地面积可视为矩形,面积可由刚性轮宽度与径向接触弧长之积表示[4]。本文所设计的覆土镇压器因其结构的对称性和左右覆土镇压轮的锥形结构特征,结合图3对单侧覆土镇压轮进行分析,其接地面积由覆土镇压轮水平宽度1部分所在水平面的接触区和其倾斜面宽度2部分与种沟形成的接触区两部分组成,其接地面积约为:
式中¢为覆土镇压轮外缘与种沟土壤实际接触区的宽度,mm;0为土壤下陷量,mm;1为覆土镇压轮外径,mm;2为覆土镇压轮近种沟侧与土壤接触处直径,且,mm;为倾斜面宽度2部分与种沟形成的接触区接地面积计算直径,mm。
由此得出,覆土镇压器在作业过程中对种子上方土壤产生的压强为:

一般对于玉米种植过程中要求镇压作业对土壤产生的压强在30~50 kPa范围内为宜[20],因此结合式(14)和(15),对于本文设计的覆土镇压器满足镇压作业性能要求需有:
(16)
对于开沟作业后的黏壤土,以镇压强度为40 kPa时进行计算,满足镇压强度的土壤下陷量取0=8 mm;外径1=350 mm;宽度参数1=20 mm,2=70 mm,3=(0~30) mm;覆土镇压轮内倾角=(10~20)°。结合双圆盘开沟器作业后的种沟沟型特征,代入式(16)经计算得到,作用在覆土镇压器上的载荷的取值范围约为570~790 N。
3 试 验
3.1 试验方法
试验于2016年4月在吉林省农业机械研究院试验田进行。试验地土壤为典型东北区黑钙土。试验前,0~10 cm处土壤容积密度为1.18 g/cm3,10~20 cm处土壤容积密度为1.32 g/cm3,0~5 cm处土壤含水率为12.8%,5~10 cm处土壤含水率为15.1%,10~15 cm处土壤含水率为17.1%,15~20 cm处土壤含水率为19.6%,试验中机具作业速度为2.1 m/s,试验现场如图5所示。
试验用的主要仪器有约翰迪尔906型拖拉机、SC-900型土壤紧实度仪、MS-350型水分测定仪、环刀组件(容积100 cm3)、电子天平、电子秤、钢板尺等。

图5 田间试验
3.2 载荷设置方法
轮子在非刚性路面承受载荷时,其下陷量0的计算可简化为[4]:
式中为土壤特性参数,且=(1+0.27);为与土壤性质有关的参数;为镇压轮宽度,mm;为镇压轮直径,mm。
由式(17)可知土壤下陷量0与土壤特性、镇压轮结构特性和载荷有关,因此在土壤条件和镇压轮结构既定的条件下,载荷与土壤下陷量正相关。
将镇压轮单独取出进行下陷量标定试验,通过电子秤和刻度尺记录实测载荷与土壤下陷量,对载荷与土壤下陷量之间的关系进行标定。标定时通过电子秤测量载荷(该载荷为重力载荷,可由质量与重力加速度之积表示),通过给镇压轮增加配重以实现改变载荷。为了使下陷量标定数据拟合曲线能更准确,在标定过程中,应使标定载荷包含上文计算的值范围(570~790 N),因此标定载荷选取475~925 N(同时包含后续试验选取的载荷水平),且每间隔50 N测一次土壤下陷量,测量5次取平均值。土壤下陷量测量方法如图6所示,载荷标定数据见表1。
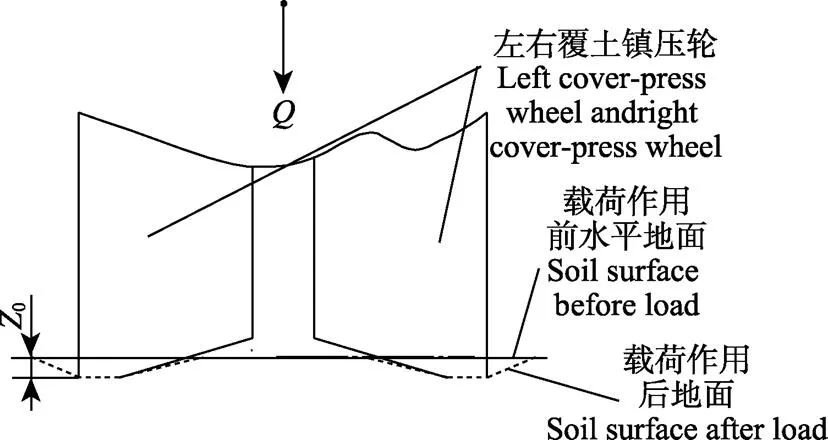
注:Z0为土壤下陷量,mm。
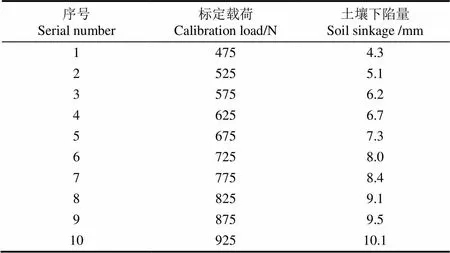
表1 土壤下陷量标定数据
通过Origin软件中的Polynomial Fit拟合工具得到土壤下陷量¢与载荷¢的拟合图,如图7。由于土壤下陷量与载荷为正相关,建立的二次函数拟合度较好,因此得到土壤下陷量¢与载荷¢之间的函数关系式为:

式中y¢为土壤下陷量,mm;x¢为土壤下陷量所对应的载荷,N。
基于式(18)中土壤下陷量和载荷的关系,得到该覆土镇压器田间试验中载荷在500、700和900 N时对应的下陷量值为4.8、7.6和9.8 mm。因此,如图1所示,可通过覆土镇压装置中高度调节装置上所配置的丝杠组件,以实现镇压轮下陷量的调整,即完成载荷的设置。
3.3 试验因素与因素水平的选择
田间试验为基于Box-Behnken(BBD)试验设计的响应曲面法的3因素3水平试验,每组试验重复3次,取平均值作为试验结果。田间试验的目的是寻找覆土镇压器最佳的结构和作业参数,并探寻各个因素对该装置覆土和镇压性能的影响规律[25]。
由式(11)和式(16)可知,在外径1=350 mm、单侧覆土镇压轮水平面宽度1=20 mm和倾斜面宽度2= 70 mm已经确定的情况下,本文选取外载荷、左右覆土镇压轮间距3、内倾角为试验因素,每个因素取3个水平。根据式(16)所得出的覆土镇压器载荷的取值范围为570~790 N,实际试验载荷应包含计算的值,因此本文取载荷3水平分别为500、700和900 N;左右覆土镇压轮的间距3过大会影响覆土质量,为了保证覆土质量,3的取值范围应小于种沟曲线上点和点¢之间的水平间距(如图3所示),因此本文取左右覆土镇压轮间距3水平分别为0、15和30 mm;根据式(11)~(13)所确定的内倾角范围为≤18.67°,由于内倾角的分析是在假设覆土作业过程中土壤不考虑回土和壅土的情况下,且当过小会因轮体沿前进方向产生的壅土现象而影响覆土质量,结合实际加工情况,因此本文取内倾角3水平分别为10°、15°和20°,具体因素水平见表2。
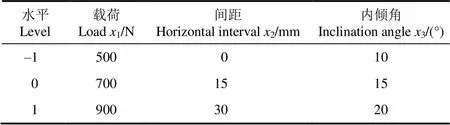
表2 试验因素水平表
根据Design-Expert软件中的响应曲面法进行试验方案设计[26-27]。以作业后种子上方的覆土厚度和种沟上方距离地表5 cm处土壤紧实度作为试验指标,试验总次数为17次,其中的12组作为析因点,5组作为零点,零点试验重复多次,以估计试验误差。试验方案和结果如表3所示,表中1、2、3分别为载荷、左右覆土镇压轮间距和内倾角的因素编码值。
3.4 试验结果方差分析
数据经软件处理后,得出覆土镇压器作业后种沟上方距离地表5 cm处土壤紧实度的方差分析结果如表4所示。对表2中的数据进行二次多元回归拟合,得到覆土镇压器作业后土壤紧实度对编码自变量的二次多元回归方程为:

由表4方差分析结果可知,影响因子1、22、32对土壤紧实度影响极显著,影响因子2、3在=0.05时影响显著,其他影响因子不显著。且各因子对土壤紧实度的显著性由大到小依次为载荷、左右覆土镇压轮间距、内倾角。
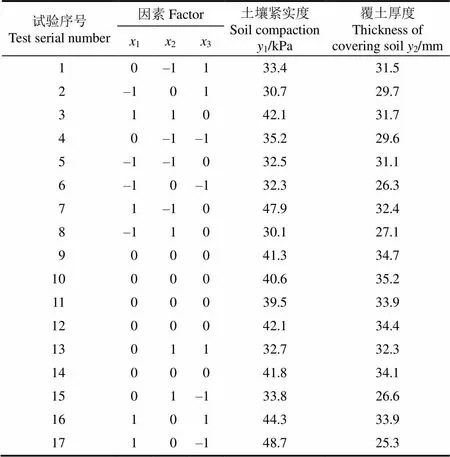
表3 试验方案与结果
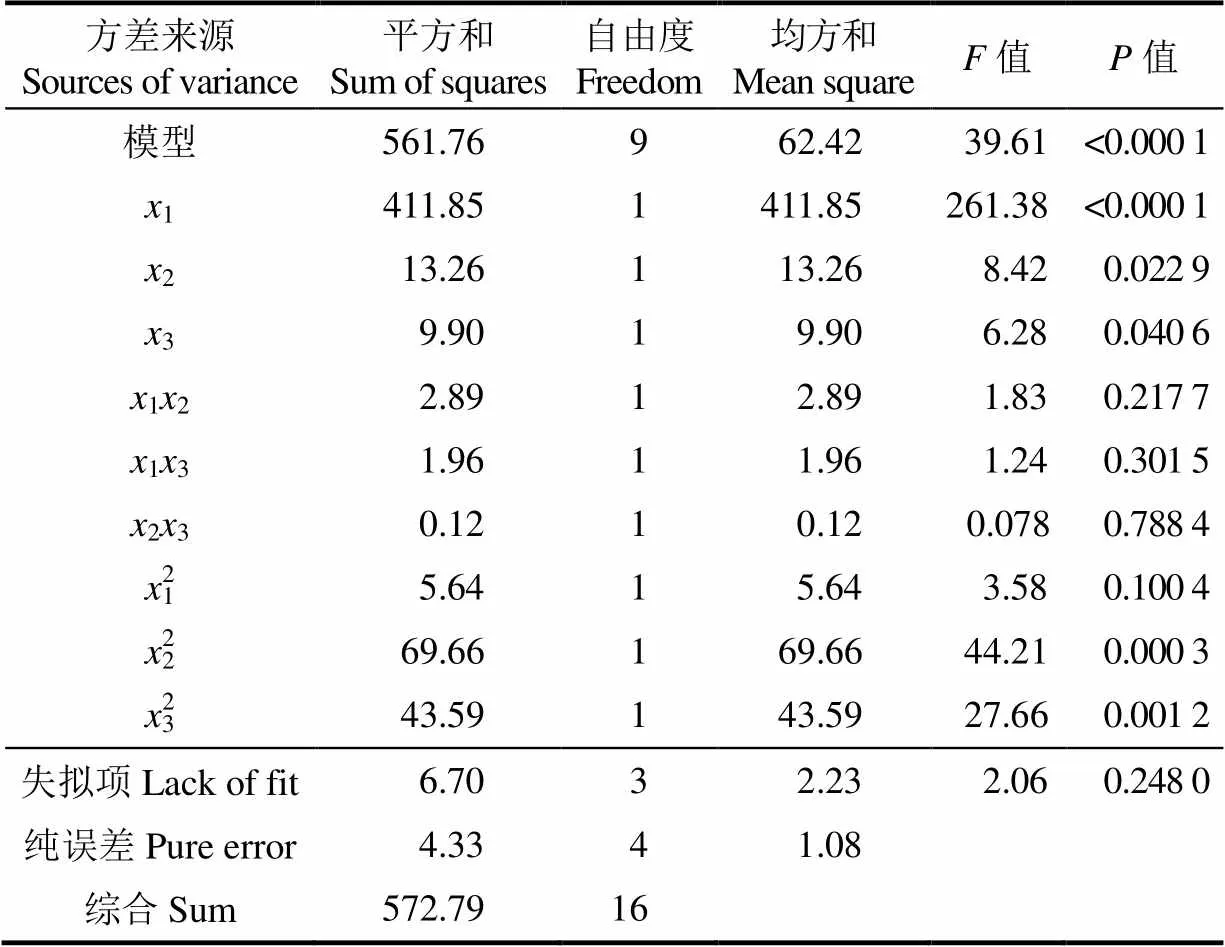
表4 土壤紧实度方差分析
数据经软件处理后,得出覆土镇压器作业后覆土厚度的方差分析结果如表5所示。对表2中的数据进行二次多元回归拟合,得到覆土镇压器作业后覆土厚度对编码自变量的二次多元回归方程为:

由表5方差分析结果可知,影响因子1、3、12、32对覆土厚度影响极显著,影响因子2、13、22在=0.05时显著,其他影响因子不显著。且各因子对覆土厚度的显著性由大到小依次为内倾角、载荷、左右覆土镇压轮间距。
由方差分析我们可以看出,载荷对覆土和镇压性能均有较大影响,这是由于载荷的大小直接关系覆土力和镇压力的大小,这与贾洪雷等人对仿形弹性镇压轮对土壤紧实度的影响因素研究相一致[15];内倾角对覆土性能的影响仅次于载荷,这是由于内倾角直接关系到覆土力在指向种沟底部的分力的大小,王景立对八字形、双圆盘式和挤压式覆土器的研究中同样发现,覆土器与土壤的作业角度是影响覆土厚度的主要因素[8]。
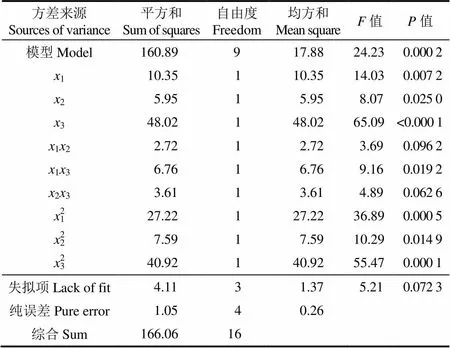
表5 覆土厚度方差分析
3.5 试验结果响应曲面法分析
应用响应曲面法分析各因素对作业后种沟的土壤紧实度和覆土厚度的影响。具体操作方法为固定3个因素中1个因素为0水平,考察其他2个因素对土壤紧实度和覆土厚度的影响。
1)固定内倾角为15°,得到载荷和左右覆土镇压轮间距对土壤紧实度和覆土厚度的关系分别为:

(22)
由图8、式(21)和式(22)可知,在该试验水平下,载荷对土壤紧实度的影响比左右覆土镇压轮间距显著,土壤紧实度随着载荷的增加而上升,其上升趋势基本稳定,这是由于载荷的大小直接影响镇压力的大小,进而影响土壤紧实度;土壤紧实度随左右覆土镇压轮间距的增加呈现先增加后减少的趋势,这可能是由于在间距较大时,覆土镇压器的锥形结构不足以有足够的接触面积使种沟土壤进行覆土作业,而当间距逐渐趋于0时,会因发生了种沟土壤沿机具前进方向的壅土现象而导致了覆土厚度的下降。在该试验水平下,载荷对覆土厚度的影响比左右覆土镇压轮间距显著,这是由于载荷直接影响覆土力的大小,而左右覆土镇压轮间距通过影响覆土力的受力面积而影响覆土厚度,因此其影响程度要小于载荷;覆土厚度随载荷和左右覆土镇压轮间距的增大均呈现先增加后减小的趋势,这可能是由于在载荷过大或间距过小时覆土镇压器沿机具前进方向出现了壅土现象,而当载荷过小或间距过大时,又不能提供足够的覆土力和作用面积。
2)固定左右覆土镇压轮间距为10 mm,得到载荷和内倾角对土壤紧实度和覆土厚度的关系分别为:

(24)
注:固定内倾角为15°。
Note: Inclination angle is fixed at 15°.
图8 载荷和间距对土壤紧实度和覆土厚度影响的响应曲面
Fig.8 Response surface showing effects of load and horizontal interval on soil compaction and thickness of covering soil
由图9、式(23)和式(24)可知,在该试验水平下,载荷对土壤紧实度的影响比内倾角显著,土壤紧实度随着载荷的增加而上升,其上升趋势基本稳定,这中现象可由式(15)得出,在接触面积不变时,载荷对镇压力的影响要大于内倾角;土壤紧实度随内倾角的增加而缓慢增加,且呈现先增加后减少的趋势,这可能是由于当内倾角过小时会引起种沟土壤沿左右覆土镇压轮间距沿镇压反方向流动,产生了一个镇压阻力,而当内倾角过大时会使载荷沿覆土镇压轮与种沟土壤接触面沿垂直方向的分力减小,进而使土壤紧实度减少。在该试验水平下,内倾角对覆土厚度的影响比载荷显著,覆土厚度随着内倾角的增加而上升,且上升趋势逐渐减缓,这是由于内倾角直接关系覆土力在指向种沟底部分力的大小;覆土厚度随载荷的增加而上升,且呈现先增加后减少的趋势,这可能是由于当载荷过小或内倾角过大时,提供的覆土力相对较小,而当载荷过大或内倾角过小时,因覆土力相对较大会使种沟土壤沿机具前进方向和左右覆土镇压轮间距产生壅土现象,进而影响覆土厚度。
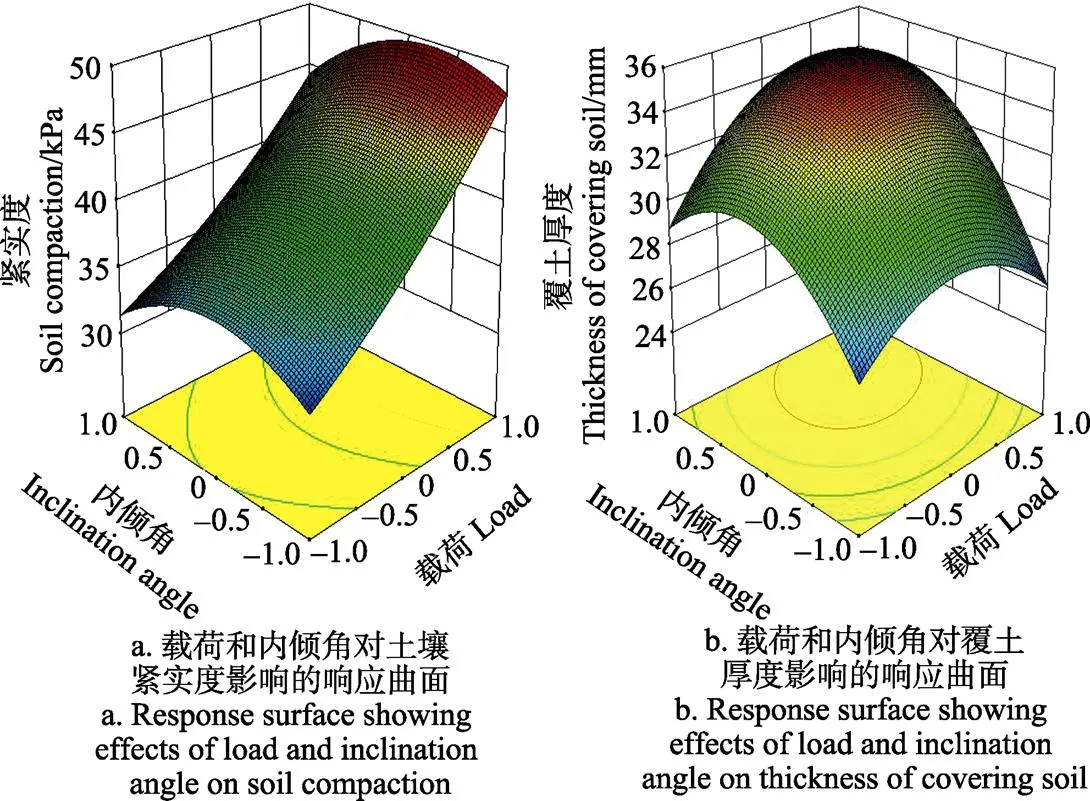
注:固定左右覆土镇压轮间距为10 mm。
5)固定载荷为700 N,得到左右覆土镇压轮间距和内倾角对土壤紧实度的关系为:

(26)
由图10、式(25)和式(26)和可知,在该试验水平下,左右覆土镇压轮间距对土壤紧实度的影响略比内倾角显著,这是由于左右覆土镇压轮间距对覆土镇压器与种沟土壤接触面积影响较大导致的;土壤紧实度随左右覆土镇压轮间距和内倾角的增大均缓慢增大,且呈现先增加后减小的趋势,这可能是由于在间距过大或内倾角过大时,覆土镇压器与种沟土壤的接触面积和覆土镇压器倾斜面与土壤作用处沿指向种沟沟底处的覆土力的分力较小,而当间距过小或内倾角过小时,会因使土壤产生反方向的流动和壅土现象而产生覆土和镇压阻力所致。在该试验水平下,内倾角对覆土厚度的影响比左右覆土镇压轮间距显著,覆土厚度随着内倾角的增加而上升,且上升趋势逐渐减缓,这是由于内倾角直接关系到覆土力在指向种沟底分力的大小;覆土厚度随左右覆土镇压轮间距的增加而缓慢上升,且呈现先增加后减少的趋势,这是由于间距过大时,覆土镇压器倾斜结构与种沟土壤接触不足,而当间距过小时,会使种沟土壤产生沿机具前进方向的壅土现象所致。
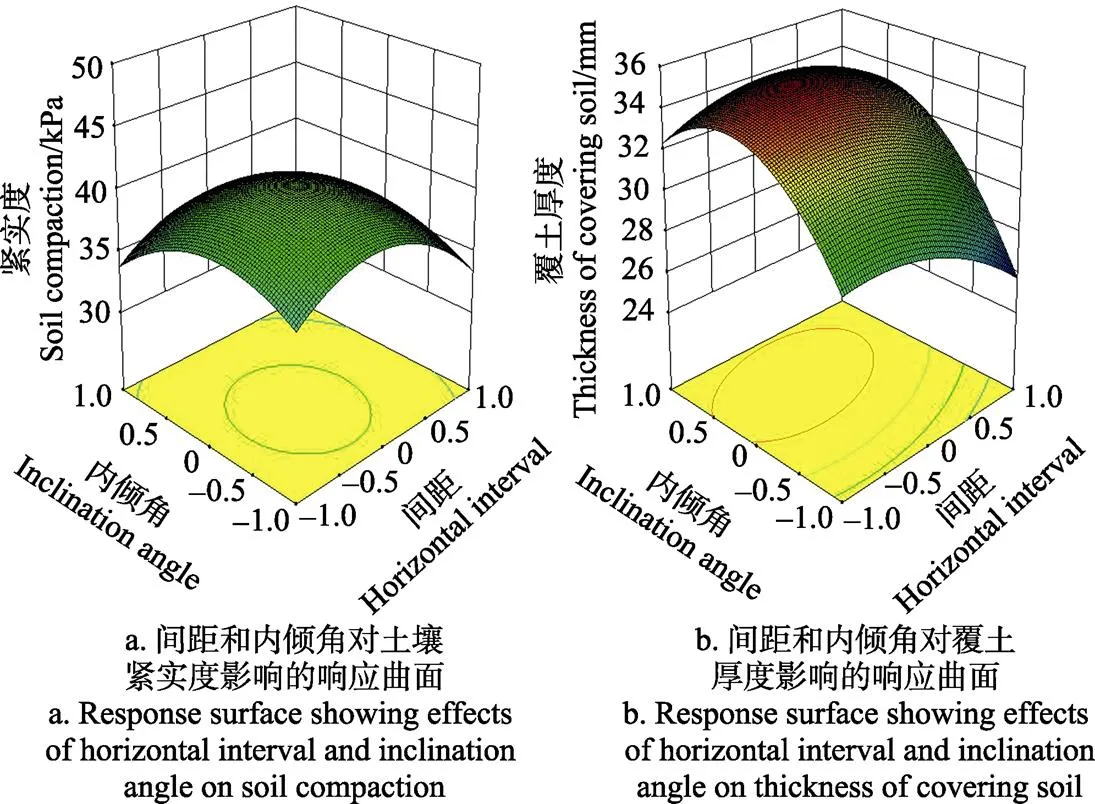
注:固定载荷为700 N。
4 验证试验
根据《NY/T1628-2008玉米免耕播种机作业质量》指标要求,一般覆土深度为镇压后种子至地表的距离为30~50 mm[28-30],从农艺的角度看,覆土深度越一致越好;而对土壤紧实度的要求一般在30~50 kPa,其中免耕播种作业要求深开沟、浅播种和重镇压操作[4,28]。因此,结合上述试验结果,本文以作业后种沟处土壤紧实度和覆土厚度尽量大为目标,通过Design-Expert软件获得了最佳参数组合为载荷900 N,左右覆土镇压轮间距约为13 mm,内倾角约为16°。实际最佳载荷900 N超出了式(16)计算出的载荷范围609~790 N,这是由于对载荷的计算是由力、接触面积和压强之间的关系得出的,其中接触面积的计算是依据刚性轮在非刚性路面上行走时,其接地面积视为矩形,因此实际接触面积与所计算接触面积有一定差异,而导致了最佳组合中载荷的取值超出了前文计算的范围。另由于试验过程中载荷为900 N与其他因素水平的组合中,发现部分组合出现了覆土厚度减小的情况,这是由于载荷过大会使作业过程中沿机具前进方向产生壅土现象导致的,因此当载荷大于900 N时,该种现象会更为显著,且由于优化目标是取土壤紧实度和覆土厚度最大值时的参数组合,当载荷大于900 N时会导致土壤紧实度值超出农艺要求范围,故最佳参数组合中载荷虽为其3水平中的最大值900 N,后续也无需对更大载荷进行考量。
验证试验由2BH-3行间播种机于吉林省农业机械研究院进行试验。为了消除随机误差,进行10次重复试验。
试验结果中土壤紧实度最大值为45.2 kPa,最小值为38.6 kPa,均值为(43.8±1.9)kPa,变异系数为4.3%。贾洪雷[31]2015年对传统镇压轮的试验得出土壤紧实度均值为(26.5±4.06)kPa,变异系数为15.32%,可以看出,本文设计的覆土镇压器的镇压质量较传统镇压器较好,且镇压作业稳定性更佳。
试验结果中覆土厚度最大值为35.5 mm,最小值为29.1 mm,均值为(32.9±2.3)mm,变异系数为6.9%。高富强等[30]2015年对挤压式覆土镇压器的试验得出覆土厚度均值为(38.32±4.57) mm,变异系数为11.6%,二者均满足作业后对覆土厚度的农艺要求[29-30],但本文设计覆土镇压器的覆土厚度标准差和变异系数均小于后者,可以看出本文设计的覆土镇压器的覆土作业稳定性更佳。
通过以上试验验证,得出选取的最佳参数组合满足既定的设计要求,且镇压质量、镇压作业稳定性和覆土作业稳定性要优于传统装置。
5 结 论
1)设计了一种具有锥形轮体结构的覆土镇压器。通过双圆盘开沟器的开沟试验和覆土、镇压理论分析确定了覆土镇压器主要结构参数和作业参数:外径d=350 mm,单侧覆土镇压轮水平宽度b=20 mm,单侧覆土镇压轮倾斜面宽度b=70 mm,内倾角取值范围为10°~20°,左右覆土镇压轮间距3≤29 mm,外载荷取值范围约为609~790 N。
2)通过三因素三水平的BBD试验,得出各因素对种沟上方距离地表5 cm处土壤紧实度的影响显著性顺序依次为:载荷、左右覆土镇压轮间距、内倾角;各因素对覆土厚度的影响显著性顺序依次为内倾角、载荷、左右覆土镇压轮间距。
3)通过Design-Expert软件得出覆土镇压器的最佳参数组合为载荷900 N,左右覆土镇压轮间距为13 mm,内倾角为16°。最佳参数组合的验证试验得出,作业后种沟上方距离地表5 cm处土壤紧实度为(43.8±1.9)kPa,变异系数为4.3%,覆土厚度均值为(32.9±2.3)mm,变异系数为6.9%,验证试验表明该覆土镇压器可实现覆土和镇压作业,且作业稳定性较好,满足既定设计要求。
[1] 王福兰. 行间播种机多功能行走轮设计与试验[D]. 长春:吉林大学,2012. Wang Fulan. Design and Experiment of Muti-functional Walking Wheel for Inter-row Seeding-machine[D]. Changchun: Jilin University, 2012. (in Chinese with English abstract)
[2] 贾洪雷,王刚,姜铁军,等.1GH-3型行间耕整机设计与试验[J].农业机械学报,2012,43(6):35-41. Jia Honglei, Wang Gang, Jiang Tiejun, et al. Design and experiment of 1GH-3 inter-row tillage machine[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(6): 35-41. (in Chinese with English abstract)
[3] 贾洪雷,陈忠亮,马成林,等. 北方旱作农业区耕作体系关键技术的研究[J]. 农业机械学报,2008,39(11):59-63. Jia Honglei, Chen Zhongliang, Ma Chenglin, et al. Key technologies for the tillage system in area of dry farming of northern China[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39(11): 59-63. (in Chinese with English abstract)
[4] 李宝筏. 农业机械学[M]. 北京:中国农业出版社,2003.
[5] 赵晓霞. 土壤镇压简述[J]. 农业工程学报,2013,29(1):21-22. Zhao Xiaoxia. Resume about soil compaction[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(1): 21-22. (in Chinese with English abstract)
[6] Altikat S, Celik A. The effects of tillage and intra-row compaction on seedbed properties and red lentil emergence under dry land conditions[J]. Soil and Tillage Research, 2011, 114(1): 1-8.
[7] Taser O F, Kara O. Silage maize (L.) seedlings emergence as influenced by soil compaction treatments and contact pressures[J]. Plant, Soil and Environment, 2005, 51(7): 289-295.
[8] 王景立. 精密播种机覆土与镇压过程对种子触土后位置控制的研究[D]. 长春:吉林大学,2012. Wang Jingli. The Research of Position Control after Seed Contacting Soil in the Process of Soil Covering and Rolling with Precision Seeder. [D]. Changchun: Jilin University, 2012. (in Chinese with English abstract)
[9] 刘选伟,金亮,赵亚祥,等.基于均匀设计的双层圆盘式覆土器的试验研究[J]. 中国农机化学报,2016,37(2):26-28. Liu Xuanwei, Jin Liang, Zhao Yaxiang, et al. Experimental research of double-deck disk coverer based on uniform design[J]. Journal of Chinese Agricultural Mechanization, 2016, 37(2): 26-28. (in Chinese with English abstract)
[10] 董向辉,李海龙,高占文. 刮板式输送覆土器的设计[J]. 农业科技与装备,2012,(12):19-20. Dong Xianghui, Li Hailong, Gao Zhanwen. Design of scraper blade delivery covering device[J]. Agricultural Scinence & Technology and Equipment, 2012, (12): 19-20. (in Chinese with English abstract)
[11] 苟文,马荣朝,樊高琼,等. 套作模式下链环式覆土器的参数优化[J]. 农业工程学报,2011,27(12):33-37. Gou Wen, Ma Rongchao, Fan Gaoqiong, et al. Parameter optimization of interlink covering device in relay-cropping system[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(12): 33-37. (in Chinese with English abstract)
[12] Ren Luquan, Li Jianqiao, Chen Bingcong. Unsmoothed surface on reducing resistance by bionics. Chinese Science Bulletin, 1995, 40(13): 1077-1080
[13] 张智泓,佟金,陈东辉,等. 不同材质仿生凸齿镇压器滚动件的模态分析[J]. 农业工程学报,2012,28(13):8-15. Zhang Zhihong, Tong Jin, Chen Donghui, et al. Modal analysis of bionic convex teeth rolling component composed of different materials[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(13): 8-15. (in Chinese with English abstract)
[14] 罗红旗,高焕文. 免耕播种机组合镇压器设计研究[J]. 北京工商大学学报,2008,26(3):21-24. Luo Hongqi, Gao Huanwen. Study on combined press for permanent raised beds planter[J]. Journal of Beijing Technology and Business University, 2008, 26(3): 21-24. (in Chinese with English abstract)
[15] 贾洪雷,王文君,庄健,等. 仿形弹性镇压辊设计与试验[J]. 农业机械学报,2015,46(6):28-34. Jia Honglei, Wang Wenjun, Zhuang Jian, et al. Design and experiment of profiling elastic press roller[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(6): 28-34. (in Chinese with English abstract)
[16] Jia Honglei, Wang Wenjun, Luo Xiaofeng, et al. Effects of profiling elastic press roller on seedbed properties and soybean emergence under double row ridge cultivation[J]. Soil Tillage Research, 2016, 162: 34-40.
[17] da Silva R P, Cora J E, Carvalho A, et al. Effect of sowing depth and press wheels submitted to vertical loads on soil temperature and moisture contents during corn seed germination[J]. Ciencia Eagrotecnologia, 2008, 32(3): 929-937.
[18] Taser O F, Kara O. Silage maize (L.) seedlings emergence as influenced by soil compaction treatments and contact pressures[J]. Plant, Soil and Environment, 2005, 51(7): 289-295.
[19] Ichiro I, Hiroshi M, Takeshi S, et al. Study on improving the emergence of direct sowing sugar beets (part1) improving emergence rate by press roller attached to seeder[J]. Journal of the Japanese Society of Agricultural Machinery, 2006, 68(6): 75-82.
[20] 郭慧. 行间播种机弹性镇压装置研究与试验[D]. 长春:吉林大学,2014. Guo Hui. Research and Experiment of Elastic Press Device for Inter-Row Till-Planter[D]. Changchun: Jilin University, 2014. (in Chinese with English abstract)
[21] 中国农业机械化科学研究院.农业机械设计手册(上册)[M].北京: 中国农业科学技术出版社,2007.
[22] 北京农业工程大学. 农业机械学(下册)[M]. 北京:农业出版社,1996.
[23] 孙一厚,高行方,余登苑.农业土壤力学[M]. 北京:农业出版社,1985.
[24] 贾铭钰. 免耕播种机镇压装置的试验研究及计算机辅助设计[D]. 北京:中国农业大学,2000. Jia Mingyu. Study on Press-Device of No-tillage Seeder and CAD[D]. Beijing: China Agricultural University, 2000. (in Chinese with English abstract)
[25] 任露泉.试验优化设计与分析[M].长春:吉林科学技术出版社,2001.
[26] 葛宜元. 试验设计方法与Design-Expert软件应用[M]. 哈尔滨:哈尔滨工业大学出版社,2014.
[27] 贾洪雷,赵佳乐,姜鑫铭,等. 行间免耕播种机防堵装置设计与试验[J]. 农业工程学报,2013,29(18):16-25. Jia Honglei, Zhao Jiale, Jiang Xinming, et al. Design and experiment of anti-blocking mechanism for inter-row no-tillage seeder[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(18): 16-25. (in Chinese with English abstract)
[28] 吉林省农机局. 保护性耕作技术的作业质量要求[J]. 中国农机化导报,2015,(8):1-3.
[29] 张艳,梁凯荣,顾长茹. 玉米大垅双行地膜覆盖栽培技术[J]. 农民致富之友,2011,(9):6.
[30] 高富强,陶仁,齐鹏. 2BQMJ-2型玉米免耕播种机播种性能试验[J]. 农业科技与装备,2015(7):5-8. Gao Fuqiang, Tao Ren, Qi Peng. Performance experiment of type 2BQMJ-2 maize no-tillage seeder[J]. Agricultural Science & Technology and Equipment, 2015(7): 5-8.
[31] 贾洪雷,郭慧,郭明卓,等. 行间耕播机弹性可覆土镇压 轮性能有限元仿真分析及试验[J]. 农业工程学报,2015,31(21):9-16. Jia Honglei, Guo Hui, Guo Mingzhuo, et al. Finite element analysis of performance on elastic press wheel of row sowing plow machine for covering with soil and its experiment[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(21): 9-16. (in Chinese with English abstract)
Design and experiment of soil-covering and soil-compacting device with cone-shaped structure of wheel
Guo Hui1,2, Chen Zhi2,3, Jia Honglei1,2※, Zheng Tiezhi4, Wang Gang1,2, Wang Qi1,2
(1.130025,;2.130025,;3.100080130062)
The soil-covering and press wheel are the main parts of the corn planter, and their performances are directly related to the growth and the output of the corn. The device with the functions of soil covering and soil compaction can improve the soil moisture content after planting and simplify the structure of machine. The squeeze-type coverer is a typical device with the functions of soil covering and soil compaction. But due to that the contact area is too small to bring the poor stability of soil-covering and soil-compacting during work process, the squeeze-type coverer is often used on no-till planter. A new type of soil-covering and soil-compacting device for corn planter was designed in this paper. The device was composed of 2 soil-covering-pressing wheels with cone-shaped structure, and realized the functions of soil-covering and soil-compacting depending on the extrusion force of soil produced by soil-covering-pressing wheel during planting. The main structure parameters of the soil-covering and soil-compacting device were determined through theoretical analysis and experiment of double-disk opener, which were mean diameter of 350 mm, width of the horizontal part of single soil-covering-pressing wheel of 20 mm, width of the inclined surface of single cover-press wheel of 70 mm, and the value range of horizontal interval of left and right soil-covering-pressing wheel of less than 29 mm. The leaning angle of soil-covering-pressing wheel was determined through theoretical analysis of soil-covering process based on the shape of soil furrows, which meant the leaning angle was about less than 20°. Based on the agronomic requirement of soil-compacting, the range of external load was about 609-790 N. Through analyzing, it was found that the external load, the horizontal interval between left and right soil-covering-pressing wheel and the leaning anglewere the main influencing factors on the functions of soil-covering and soil-compacting of the device. Taking the 3 indices as the experimental factors using Design-Expert software, the Box-Benhnken experiments of 3 factors and 3 levels were conducted, and the results showed that the order of the influence of the factors on the soil compactness in the top 5 cm soil layer of the seed furrow from high to low was the external load, the horizontal interval between left and right soil-covering-pressing wheel and the leaning angle. The order of the influence of the factors on thickness of covering soil was the leaning angle, the load and the horizontal interval between left and right soil-covering-pressing wheel. The optimal parameter combination of the device was the external load of 900 N, the horizontal interval between left and right soil-covering-pressing wheel of 13 mm and the leaning angle of 16°. Verification testing indicated that the soil compactness in the top 5 cm soil layer of the seed furrow was (43.8±1.9) kPa, the coefficient of variation was 4.3%, and the thickness of covering soil was (32.9±2.3) mm with the coefficient of variation of 6.9%. The soil-covering and soil-compacting device designed in this paper has good performance of soil-covering, soil-compacting and working stability. This study can provide a reference for the design of planters.
agricultural machinery; design; kinematics; soil-covering; soil-compacting; device; experiment
10.11975/j.issn.1002-6819.2017.12.008
S222.23
A
1002-6819(2017)-12-0056-10
2016-11-16
2017-06-05
国家重点研发计划课题(2017YFD0700904,LFGC14322);吉林省科技发展计划项目(20150441008SC,20160312020ZX,20150204007NY,20140441006SC)
郭 慧,博士生,主要从事保护性耕作配套机具关键部件研究。长春 吉林大学工程仿生教育部重点实验室,130025。Email:guohuipp0322@163.com
贾洪雷,教授,博士生导师,主要从事保护性耕作技术及仿生智能作业机械研究。长春 吉林大学工程仿生教育部重点实验室,130025。 Email:jiahl@vip.163.com
郭 慧,陈 志,贾洪雷,郑铁志,王 刚,王 奇. 锥形轮体结构的覆土镇压器设计与试验[J]. 农业工程学报,2017,33(12):56-65. doi:10.11975/j.issn.1002-6819.2017.12.008 http://www.tcsae.org
Guo Hui, Chen Zhi, Jia Honglei, Zheng Tiezhi, Wang Gang, Wang Qi. Design and experiment of soil-covering and soil-compacting device with cone-shaped structure of wheel[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(12): 56-65. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.12.008 http://www.tcsae.org
