用于番茄果秧分离的多组非圆行星轮系振动发生器设计
2017-07-18王丽红李成松朱兴亮
王丽红,张 娜,坎 杂,李成松,朱兴亮
用于番茄果秧分离的多组非圆行星轮系振动发生器设计
王丽红1,张 娜1,坎 杂1※,李成松1,朱兴亮2
(1. 石河子大学机械电气工程学院,石河子 832000;2. 新疆农业大学机械交通学院,乌鲁木齐 830052)
针对现有用于番茄果秧分离的双偏心块振动发生器运动参数易受载荷影响、分离滚筒易堵塞以及前期研究的单组非圆行星轮系振动发生器传动部件载荷不均衡等问题,设计了一种三组非圆行星轮系振动发生器。对双偏心块式振动发生器驱动下分离滚筒的运动进行了分析,获取了分离滚筒拟合角位移、角速度曲线,并将其作为三组非圆行星轮系振动发生器的输出目标曲线。通过建立非圆齿轮传动比方程以及节曲线方程,确定了三组非圆行星轮系振动发生器非圆齿轮的基本参数。搭建了分离滚筒运动测试试验台,利用高速摄像系统在振动发生器输入转速为111 r/min,高速摄像系统帧率为800 帧/s的参数条件下获得实测角位移、角速度,通过MATLAB软件获取了分离滚筒在三组非圆行星轮系振动发生器驱动下的角位移和角速度拟合曲线,并分别与对应的仿真曲线和目标曲线进行对比分析,结果表明:试验角位移和角速度曲线与仿真及目标曲线基本吻合。验证了非圆行星轮系振动发生器设计的合理性。通过ADAMS获取了三组和单组非圆行星轮系振动发生器的齿面接触力,通过对比分析,发现单组非圆行星轮系振动发生器的齿面接触力变化范围为0~200 000 N,三组非圆行星轮系振动发生器齿面接触力为0~125 N,验证了三组相对于单组非圆行星轮系振动发生器更加均衡的特性。该研究为多组非圆行星轮系番茄果秧分离振动发生器的开发提供参考。
振动;分离;齿轮;收获机;非圆齿轮;行星轮系;齿轮节曲线
0 引 言
新疆独特的水土和光热条件适宜优质番茄的生长,已成为世界第二大加工番茄种植区[1-3]。近年来,新疆番茄机械化采收技术大面积推广,果秧分离振动发生器作为番茄果秧收获机中的重要部件之一,其传动效果直接影响收获机的工作性能[4]。
目前,果秧分离振动发生器主要分为连杆式、凸轮盘式、链带式和偏心块式4种[5-6],国内外广泛采用双偏心块式振动发生器[7-13],通过两个对称偏心块旋转产生变向力偶,从而驱动分离滚筒进行变速变向回转运动,实现果秧分离。
双偏心块式振动发生器具有果实分离效率高、消耗功率低等优点,技术相对比较成熟,但当收获机喂入量不均匀时,依据惯性原理实现运动需求的双偏心块式振动发生器输出的运动会由于负载的变化而变化,致使果秧分离效果受到影响,甚至产生堵塞[14]。
非圆齿轮传动具有传动平稳、结构紧凑、受载荷影响小的特点,能够实现变速变向的复杂运动[15]。国内外非圆齿轮传动技术广泛应用在造纸、液压马达、插秧机、果品收获和纺织机械等领域[16-22]。项目组[23]前期提出将非圆齿轮行星轮系应用到番茄果秧振动发生器的结构设计当中,通过全凸无内凹的节曲线获得的单组非圆齿轮行星轮系振动发生器能够实现变速变向回转运动,但轮系中传动部件载荷不均衡[24]。文献表明在非圆轮系传动过程中,多组行星轮系相对单组而言传动部件受力更均衡,行星齿轮负荷更小[24-25]。鉴于此,本文提出采用W-W型三组非圆行星轮系的番茄果秧分离振动发生器,驱动分离滚筒实现变速变向回转运动。
本文把通过双偏心块式振动发生器获得的分离滚筒运动曲线作为目标曲线,通过具有凹性和全凸无内凹的2种节曲线获取非圆齿轮齿廓,结合SolidWorks三维建模并利用ADAMS对三组非圆行星轮系振动发生器进行仿真分析,试制三组非圆行星轮系番茄果秧分离振动发生器物理样机,替换双偏心块式振动发生器进行试验,通过CPL-MS70K型高速摄像系统拍摄分离滚筒的运动过程并进行数据分析,得到分离滚筒的运动实测散点图,将其拟合后与仿真曲线、目标曲线进行对比,以验证机构设计的合理性。
1 三组非圆行星轮系振动发生器的结构及工作原理
三组非圆行星轮系番茄果秧分离振动发生器主要由输入轴总成1、系杆总成2、壳体3和输出轴总成4组成(如图1a),通过两端的轴承座与机架连接,壳体通过螺栓与机架固定。
如图1所示,系杆总成包括输入系杆、系杆轴和输出系杆3部分,两系杆结构对称。输入轴与输入系杆通过键固结,输出轴通过轴承分别与输入轴及输出系杆连接。系杆轴通过轴承与系杆总成连接。输入系杆左侧的定非圆齿轮与机架固接,三个均匀分布的行星非圆齿轮与定非圆齿轮外啮合,并通过键与系杆轴固结。输出系杆右侧的输出轴齿轮通过键与输出轴连接,与之啮合的三个行星圆齿轮通过键与系杆轴固结。当动力通过输入轴带动系杆转动时,三个行星非圆齿轮和行星圆齿轮分别绕定非圆齿轮和输出轴齿轮啮合公转,同时绕系杆轴自转,由输出轴输出需要的传动比。
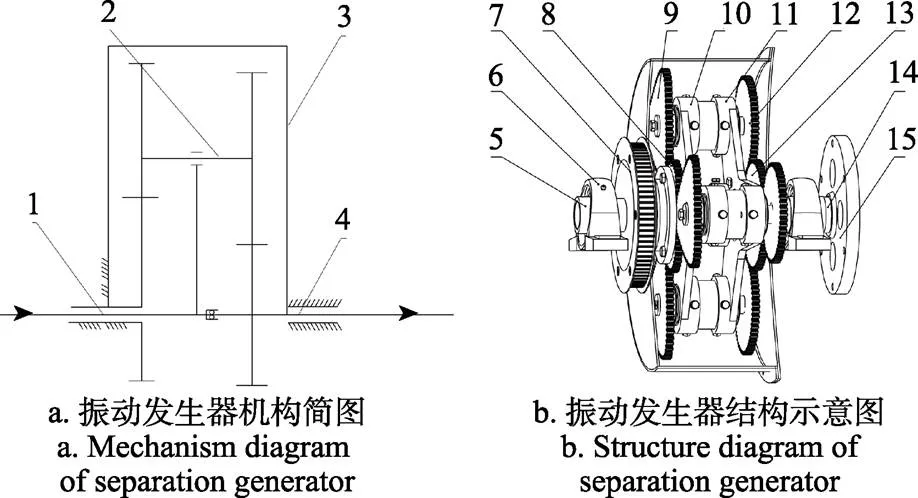
1. 输入轴总成 2. 系杆总成 3. 壳体 4. 输出轴总成 5. 输入轴 6. 轴承座 7. 同步带轮 8. 定非圆齿轮 9. 行星非圆齿轮 10. 输入系杆 11. 输出系杆 12. 行星圆齿轮 13. 输出轴齿轮 14. 输出轴 15. 法兰
工作时动力由同步带轮输入,经输入轴带动输入系杆和输出系杆同步转动,系杆轴上的行星非圆齿轮与定非圆齿轮啮合转动,输出轴齿轮与系杆轴上行星圆齿轮啮合转动。通过轮系及非圆齿轮啮合的瞬时传动比变化,使输出轴获得变速变向回转运动,从而使得与输出轴固结的法兰带动分离滚筒做变速变向回转运动。
2 三组非圆行星轮系振动发生器运动模型的建立
非圆齿轮作为非圆行星轮系振动发生器的重要零部件,直接影响轮系输出运动。为确定非圆轮系的传动要求,本文利用现有的双偏心块式振动发生器进行运动需求获取,在输入、输出角位移分段函数的基础上,结合非圆齿轮角位移处处连续、可导的特性,拟合修正后获取三组非圆齿轮传动比方程及节曲线方程。
2.1 振动发生器输出目标曲线
项目组[26]通过高速摄像系统对采用双偏心块式振动发生器时分离滚筒的运动进行分析,获得了分离滚筒角位移和角速度散点图。利用MATLAB对分离滚筒的角位移、角速度散点图进行拟合,获取图2所示的拟合角位移、角速度曲线,角位移拟合曲线的拟合度2为0.923(≥0.85),角速度拟合曲线的拟合度2为0.879(≥0.85),将角位移和角速度拟合曲线作为三组非圆行星轮系振动发生器的输出目标曲线。
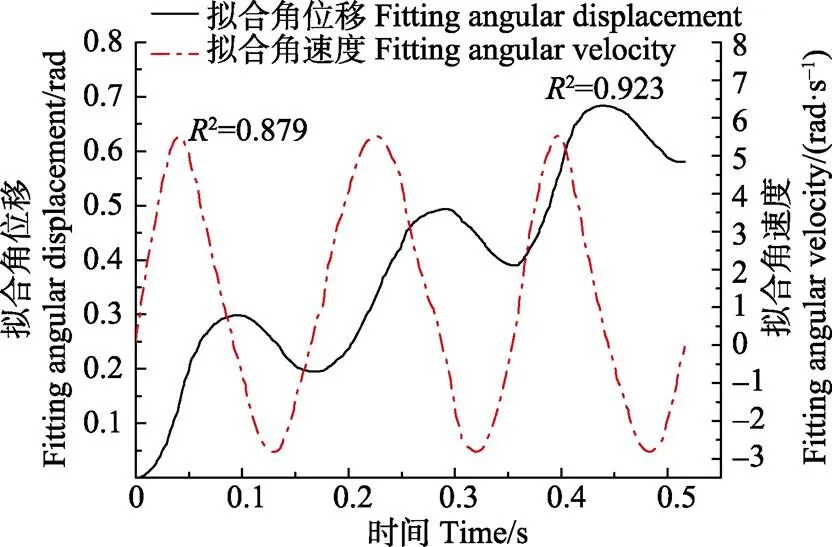
图2 双偏心块振动发生器驱动下分离滚筒的拟合角速度、角位移曲线(目标曲线)
2.2 非圆齿轮传动比方程
当偏心块式振动发生器正常工作时,利用高速摄像系统拍摄分离滚筒上的运动情况,获得其角位移散点图,结合MATLAB软件对分离滚筒的角位移散点图进行分析,获得分离滚筒(即振动发生器输出轴)角位移拟合函数如式(1)。
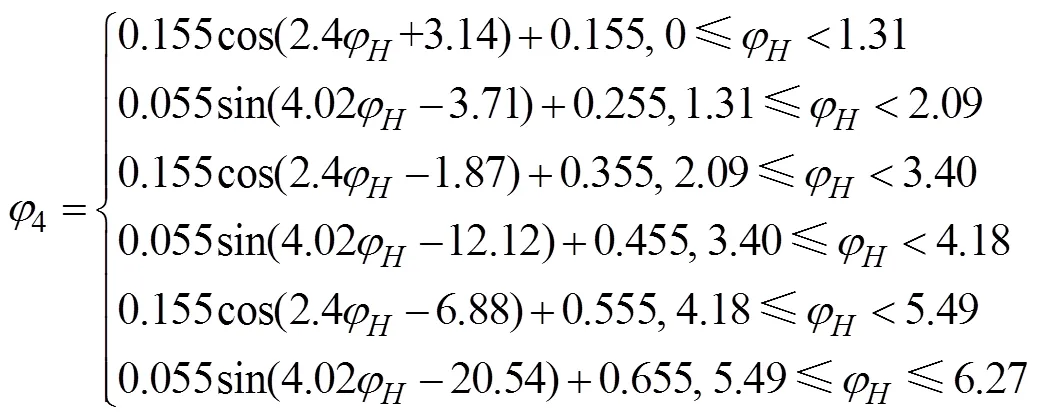
(2)
2.3 非圆齿轮节曲线方程
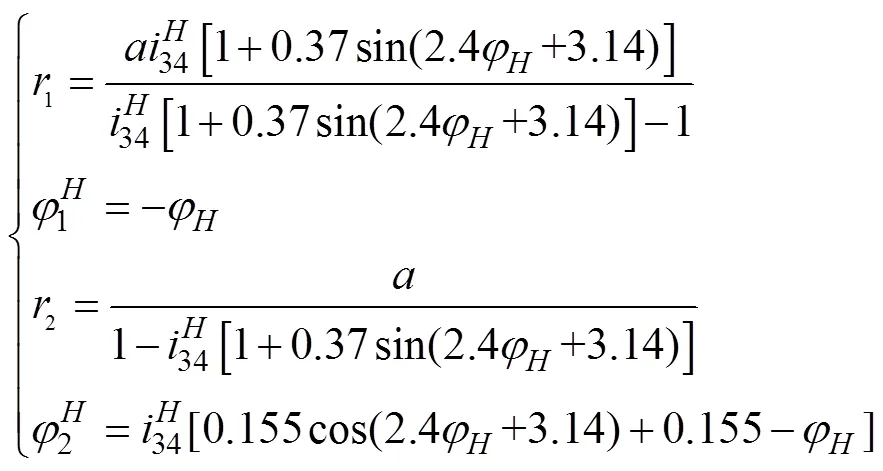
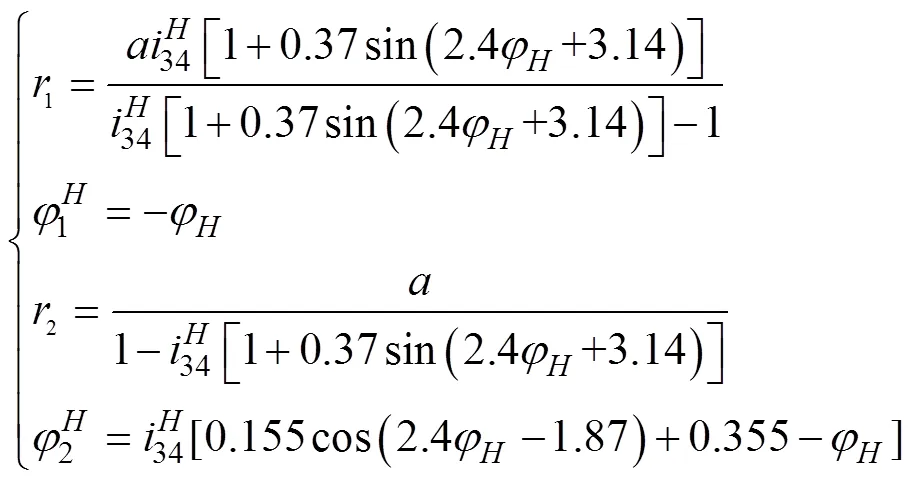
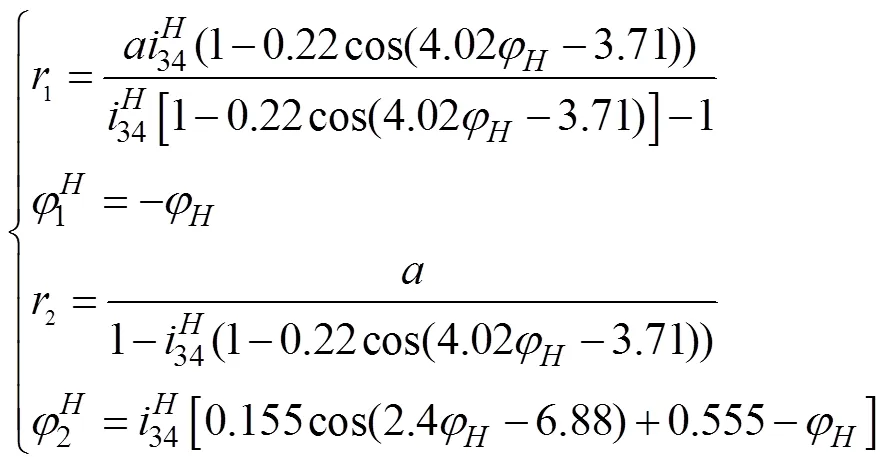
结合三组非圆行星轮系结构设计,输入输出轴的传动比4H可转化为图3a中定非圆齿轮1和输出轴齿轮4之间的瞬时相对运动传动比,表达式为:
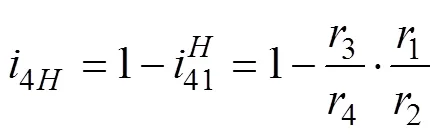
式中1、2、3、4分别为定非圆齿轮、行星非圆齿轮、行星圆齿轮、输出轴齿轮的极径,1、2分别对应如图3a中1、2的距离并随着图3a两非圆齿轮的转动而变化;3、4分别对应如图3b中3、4的距离,由于行星圆齿轮、输出轴齿轮均为圆齿轮传动,所以3、4距离保持不变。行星非圆齿轮与定非圆齿轮啮合节曲线如图3a所示,行星圆齿轮与输出轴齿轮啮合节曲线如图3b所示。
注:为两齿轮的中心距,mm;点是齿轮传动的节点;1、2、3、4分别为定非圆齿轮、行星非圆齿轮、行星圆齿轮、输出轴齿轮的极径,mm
Note:is the center distance between the two gear, mm;is the pitch point of gear transmission;1,2,3and4are the polar radius of fixed non-circular gear, planetary non-circular gear, planetary gear and output shaft gear, respectively, mm.
图3 齿轮啮合节曲线示意图
Fig.3 Diagram of gears meshing pitch curve
又有

(5)
将式(2)、(4)分别带入(5)可得出定非圆齿轮与行星非圆齿轮的节曲线方程表示为:
(7)
(9)
(11)
按照振动发生器空间结构要求,初定非圆齿轮m= 2.5 mm,定非圆齿轮齿数1=60,行星非圆齿轮齿数2=60,进而根据弧长公式=π,求得非圆齿轮中心距=143 mm,绘制三组非圆齿轮的齿廓如图4所示。此时,圆齿轮模数=2.39 mm,行星圆齿轮齿数3=57,输出轴齿轮4=63。
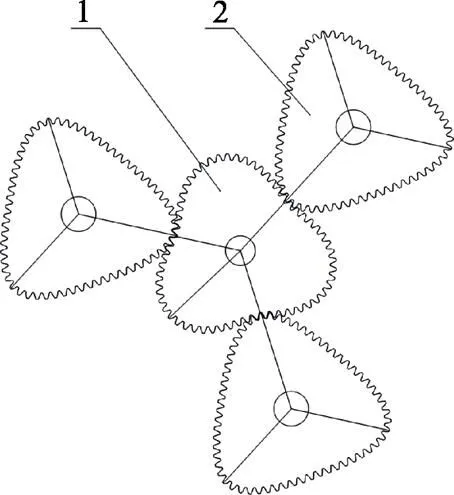
1. 定非圆齿轮 2. 行星非圆齿轮
3 仿真分析与试验验证
3.1 试验设计
本文从2个角度对三组非圆行星轮系番茄果秧分离振动发生器设计的合理性进行验证:1)将采用三组非圆行星轮系振动发生器分离滚筒的角位移曲线(仿真所得及试验所得)与采用双偏心块式振动发生器时分离滚筒的角位移曲线进行拟合比较;2)用仿真分析方法将三组和单组非圆行星轮系振动发生器时输出轴齿轮上任意一个齿面在一个周期内的受力情况进行比较。
3.1.1 运动学试验
将振动发生器模型导入ADAMS中进行仿真分析,设定模型输入转速参数为111 r/min,获取三组非圆行星轮系番茄果秧分离振动发生器输出轴角速度、角位移曲线。
试制三组非圆行星轮系振动发生器并替换FS-35振动分离试验台[27-28]上双偏心块式振动发生器进行试验,利用CPL-MS70K型高速摄像系统拍摄分离滚筒的运动情况[29-30],将试验的转速设定为111 r/min,高速摄像系统帧率设定为800帧/s。试验时调整高速摄像系统与机架的距离,以确保标记的分离滚筒拨杆处于摄录区域内。
高速摄像系统拍摄分离滚筒的运动测试试验台如图5所示。
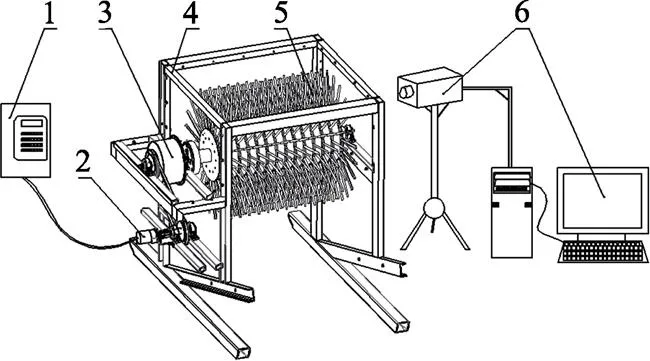
1. 变频器 2. 电动机 3. 非圆轮系振动发生器 4. 试验台 5. 标记的分离滚筒拨杆 6. 高速摄像系统
3.1.2 齿面接触力试验
为验证三组非圆行星轮系振动发生器传动部件载荷较为均衡,将三组非圆行星轮系振动发生器与单组非圆行星轮系振动发生器输出轴齿轮齿面的受力情况进行比较。在ADAMS软件中设定振动发生器输入转速为111 r/min,分别获得三组和单组非圆行星轮系振动发生器行星齿轮与输出轴齿轮啮合的接触力大小,导出数据并绘制三组和单组非圆行星轮系振动发生器齿面接触力随时间变化的曲线。
3.2 试验结果与分析
3.2.1 运动学试验结果分析
利用高速摄像分析软件Blaster Mas对摄录视频进行分割、标记并进行逐帧追踪,得到分离滚筒实测角位移散点图,并求解出角速度散点图。利用MATLAB和Origin9.0将散点拟合后得到实测拟合角位移、角速度曲线,拟合度2分别为0.861和0.981(均≥0.85)。为验证装置的准确性,将得到的实测拟合角位移、角速度曲线与目标曲线和仿真曲线进行对比,如图6所示。
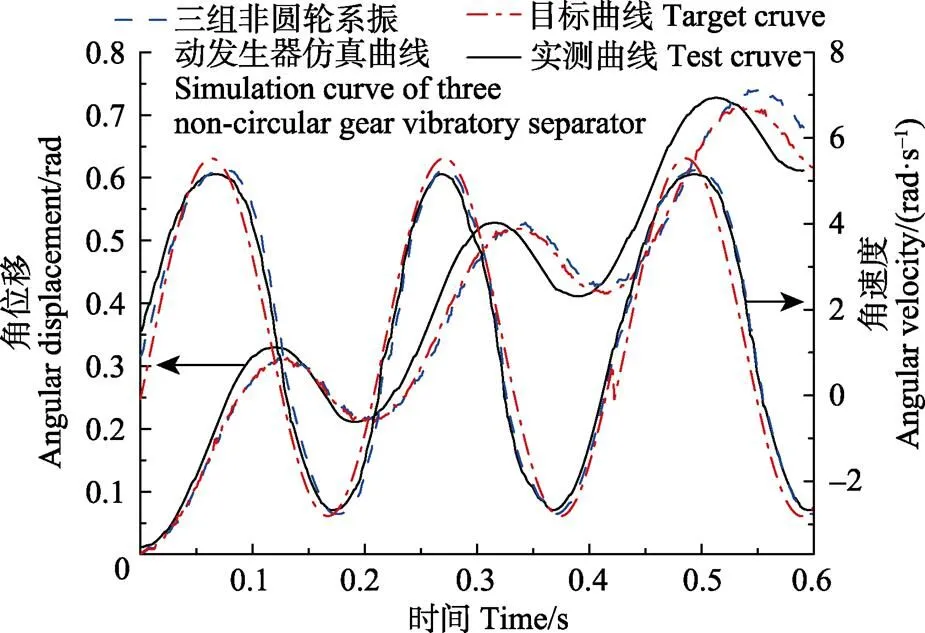
注:目标曲线为双偏心块式振动发生器曲线。
由图6可知,三组非圆轮系振动发生器输出轴角位移曲线呈现摆动增加趋势,输出轴角速度呈现周期性变化,且二者周期相同;实测曲线与仿真和目标的角位移、角速度曲线存在微小误差,角速度曲线峰值差小于0.4 rad/s,角位移峰值差小于0.05 rad,但各曲线变化趋势及关键数据点仍较为接近。即从运动学分析可知,三组非圆轮系振动发生器能产生保证果秧分离的运动需求,同时由于齿轮传动所具有的特性可保证果秧分离过程中运动参数不易受载荷影响而发生变化,从而避免发生阻塞。
3.2.2 齿面接触力试验结果分析
将三组齿面接触力变化曲线和单组的进行比较,得到2个齿面接触力的对比分布图(如图7所示)。
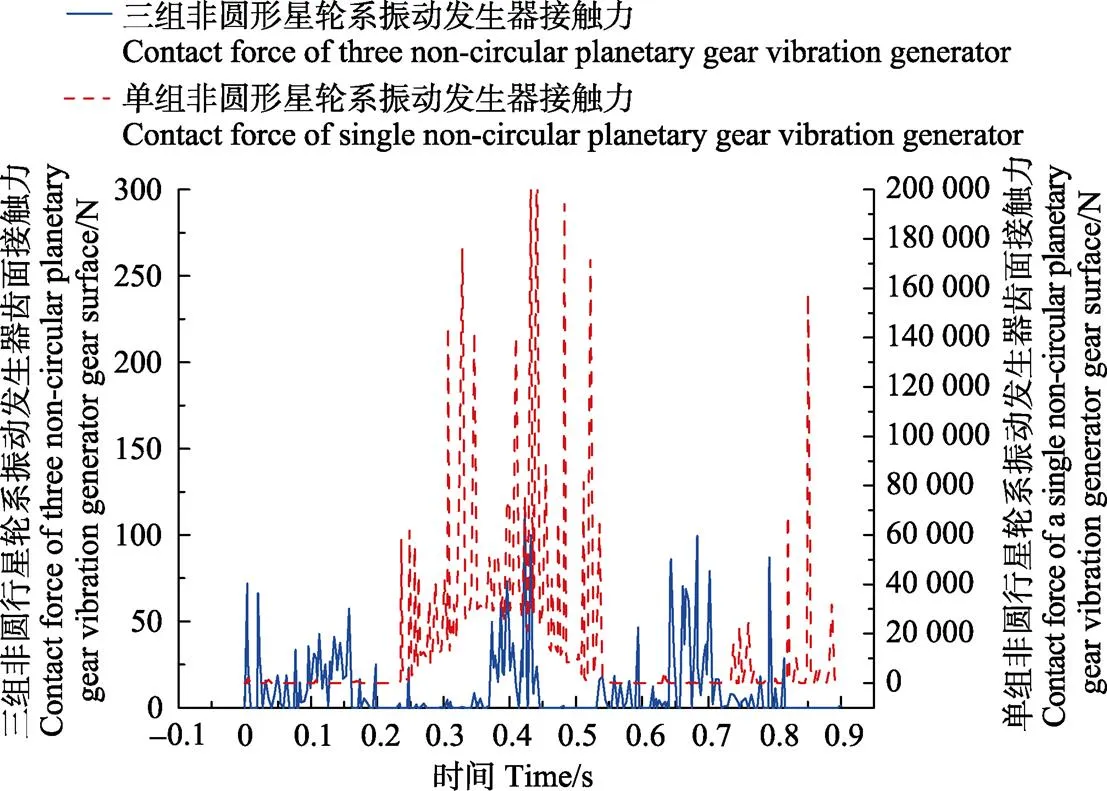
图7 三组与单组非圆行星轮系振动发生器齿面接触力对比图
从图7可看出,单组非圆行星轮系振动发生器的齿面接触力变化范围为0~200 000 N,三组非圆行星轮系振动发生器的齿面接触力变化范围为0~125 N。因此,三组非圆行星轮系振动发生器传动部件载荷相对于单组非圆行星轮系振动发生器更加均衡。
4 结 论
1)设计了基于多组非圆行星轮系的番茄果秧分离振动发生器,并通过分析其运动模型建立了非圆齿轮传动比方程和节曲线方程,进而确定了非圆齿轮的基本参数。
2)搭建了分离滚筒运动测试试验台,利用高速摄像系统获取了分离滚筒在三组非圆行星轮系振动发生器驱动下的实测角位移和角速度曲线,并分别与对应的仿真曲线和目标曲线进行对比分析,结果表明:试验角位移和角速度曲线与仿真和目标曲线基本吻合,验证了非圆行星轮系振动发生器设计的合理性。
3)获取并对比分析了三组非圆行星轮系振动发生器与单组非圆行星轮系振动发生器的齿面接触力,验证了三组非圆行星轮系振动发生器传动部件载荷相对于单组非圆行星轮系振动发生器更加均衡的特性。
[1] 纵婧. 中国新疆对哈萨克斯坦农产品出口潜力与市场开拓研究[D]. 乌鲁木齐:新疆财经大学,2014. Zong Jing. Research on Export Potential and Market Development of Xinjiang Agricultural products in Kazakhstan[D]. Urumqi: Xinjiang University of Finance, 2014. (in Chinese with English abstract)
[2] 杨二军.新疆番茄酱出口市场潜力研究[D].乌鲁木齐:新疆农业大学,2013. Yang Erjun. Research on Tomato Products Export Market Potential in Xinjiang[D]. Urumqi: Xinjiang Agricultural University. 2013. (in Chinese with English abstract)
[3] 李成松,坎杂,谭洪洋,等.4FZ-30型自走式番茄收获机的研制[J].农业工程学报,2012,28(10):20-26. Li Chengsong, Kan Za, Tan Hongyang, et al. Development of 4FZ-30 self-propelled tomato harvester[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(10): 20-26. (in Chinese with English abstract)
[4] 梁喜凤,杨犇,王永维.番茄收获机械手轨迹跟踪模糊控制仿真与试验[J].农业工程学报,2013,29(17):16-23. Liang Xifeng, Yang Ben, Wang Yongwei. Simulation and test of trajectory tracking control for tomato harvesting manipulator based on fuzzy logic compensation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(17): 16-23. (in Chinese with English abstract)
[5] 石河子大学.番茄收获分离装置及该装置所构成的番茄收获机:201010578942.X[P]. 2011-06-01.
[6] 石河子大学.差速带式番茄收获分离装置及该装置所构成的番茄收获机:201210029978.1[P]. 2012-02-11.
[7] 张源颖.新疆加工番茄产业发展面临的问题及对策[J].新疆农垦经济,2011,(11):46-49.
[8] 王长勤,许林云,周宏平,等.偏心式林果振动采收机的研制与试验[J].农业工程学报,2012,28(16):10-16. Wang Changqin, Xu Linyun, Zhou Hongping, et al. Development and experiment of eccentric-type vibratory harvester for forest-fruits[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(16): 10-16. (in Chinese with English abstract)
[9] Coby Lorenzen, Davls. Separator for tomato harvester: 3420239[P]. 1969-01-07.
[10] Brown G K. Harvest mechanization status for horticultural crops[J]. ASAE Paper, 1980(80-1532).
[11] Henry E, Studer, Davis. Tomato harvester: 4232506[P]. 1980-11-05.
[12] Johnson Farm Machinery Company. Multiple weight drum shaker: 5316519[P]. 1994-05-31.
[13] FMC Corporation. Adjustable four-weight shaker head: 5813910[P]. 1998-09-29.
[14] 朱兴亮,李成松,坎杂,等.加工番茄果秧分离技术发展现状分析[J].河北科技大学学报,2013,34(5):399-402. Zhu Xingliang, Li Chengsong, Kan Za, et al. Analysis of present development of fruit-seedling separation technology in tomato processing[J]. Journal of Hebei University of Science and Technology, 2013, 34(5): 399-402. (in Chinese with English abstract)
[15] 杨存.非圆齿轮运动学与动力学研究[D].兰州:兰州理工大学,2014. Yang Cun. Research on the Kinematics and Dynamics of Non-circular Gears[D]. Lanzhou: Lanzhou University of Technology, 2014. (in Chinese with English abstract)
[16] 赵匀,高林弟,陈建能,等.变形偏心非圆齿轮行星系分插机构设计和参数优化[J].农业机械学报,2011,42(12):74-77. Zhao Yun, Gao Lindi, Chen Jianneng, et al. Design and parameter optimization of deformed eccentricnon-circulargear transplanting mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(12): 74-77. (in Chinese with English abstract)
[17] 熊镇芹,高本河,吴序堂.非圆行星齿轮液压马达的配流设计研究[J].机械科学与技术,2004,5:509-511.
[18] 付威,罗锡文,曾山,等.水稻精量旱穴播机穴距电液比例控制系统的设计与试验[J].农业工程学报,2015,31(9):25-31. Fu Wei, Luo Xiwen, Zeng Shan, et al. Design and experiment of electro-hydraulic proportional control hill distance system of precision rice hill-drop drilling machine for dry land[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(9): 25-31. (in Chinese with English abstract)
[19] 任根勇.剑杆织机非圆齿轮行星轮系引纬机构的反求设计与仿真分析[D].杭州:浙江理工大学,2012. Ren Genyong. Reverse Design and Simulation Analysis of the Planetary Non-circular Gears Trains Weft Insertion Mechanism Applied on Rapier Loom[D]. Hangzhou: Zhejiang Sci-tech University, 2012. (in Chinese with English abstract)
[20] 董剑,吴序堂,贺敬良,等.新型非圆齿轮行星轮系低速大扭矩液压马达:CN101463792[P].2009-06-24.
[21] 俞高红,张玮炜,孙良,等.偏心齿轮-非圆齿轮行星轮系在后插旋转式分插机构中的应用[J].农业工程学报,2011,27(4):100-105. Yu Gaohong, Zhang Weiwei, Sun Liang, et al. Application of planetary gear train with eccentric gears and non-circular gear in backward rotary transplanting mechanism[J]. Transactions of the Chinese Society for Agricultural Engeering (Transactions of the CSAE), 2011, 27(4): 100-105. (in Chinese with English abstract)
[22] 陈度,杜小强,王书茂,等.振动式果品收获技术机理分析及研究进展[J].农业工程学报,2011,27(8):195-200. Chen Du, Du Xiaoqiang, Wang Shumao, et al. Mechanism of vibratory fruit harvest and review of current advance[J]. Transactions of the Chinese Society for Agricultural Engeering, 2011,27(8): 195-200. (in Chinese with English abstract)
[23] 朱兴亮,王丽红,坎杂,等.非圆轮系加工番茄果秧分离振动发生器的设计[J].江苏农业科学,2016,44(3):398-401.
[24] 吴序堂,王贵海.非圆齿轮及非匀速传动比[M].北京:机械工业出版社,1997:57-112.
[25] 张春鹏.非圆齿轮行星轮系传动性能分析[D].沈阳:沈阳工业大学,2016. Zhang Chunpeng. Analysis of Non-circular Planetary Gear Train Transmission Performance[D]. Shenyang: Shenyang University of Technology, 2016. (in Chinese with English abstract)
[26] 李成松,坎杂,谭洪洋,等. 加工番茄果秧分离装置运动过程分析[J].农业机械学报,2012,43(4):66-69. Li Chengsong, Kan Za, Tan Hongyang, et al. Movement process analysis on processing tomato fruit separation device[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(4): 66-69. (in Chinese with English abstract)
[27] 王丽红,梁荣庆,秦金伟,等.加工番茄果秧分离参数优化及验证[J].农业工程学报,2015,31(5):23-28. Wang Lihong, Liang Rongqing, Qin Jinwei, et al.Parameters’ optimization and verification for processing tomato fruit- seeding separation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(5): 23-28. (in Chinese with English abstract)
[28] 谭洪洋.加工番茄果秧分离装置的试验研究[D]石河子:石河子大学,2012. Tan Hongyang.Experimental Study on Processing of Tomato Seedling Separator. [D]. Shihezi: Shihezi University, 2012. (in Chinese with English abstract)
[29] 孙良,祝建彬,陈建能,等.基于球面曲线的空间非匀速行星轮系分插机构逆向设计[J].农业工程学报,2014,30(7):9-17. Sun Liang, Zhu Jianbin, Chen Jianneng, et al. Reverse design of transplanting mechanism with spatial planetary gear train based on spherical curve[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(7): 9-17. (in Chinese with English abstract)
[30] 李成松,高振江,坎杂,等.双支撑酿酒葡萄果实振动分离装置作业机理[J]. 农业工程学报,2015,31(4):26-32. Li Chengsong, Gao Zhenjiang, Kan Za, et al. Operation mechanism of double support vibration separation device for wine grape berry[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(4): 26-32. (in Chinese with English abstract)
Design of tomato fruit separation vibration generator with multi group non-circular planetary gear
Wang Lihong1, Zhang Na1, Kan Za1※, Li Chengsong1, Zhu Xingliang2
(1.832000,; 2830052,)
The processing tomato planting area is increasing year by year in Xinjiang, and mechanized harvesting has become an important mean of tomato harvesting. Fruit seedling separation device is one of the core working parts of processed tomato harvesting machine. At present, double eccentric block type of fruit seedling separating vibration generator is widely used. However, there are still some problems with this relatively matured technology, such as motion parameters are easily affected by load, device is easily blocked and so on, which strongly affect the performance of processing tomato harvesting machine. Some scholars proposed to apply non-circular planetary gear to the structure design of tomato fruit seedling vibration generator, but this type of tomato fruit seedling vibration generator has a problem that its transmission components load is imbalanced. To solve above problems, in this study, we put forward multiple-group non-circular planetary gear of tomato fruit seedling vibration generator. The research results published from other scholars about trajectories of separation roller and conditions of tomato harvesting vibration were used when we designed tomato fruit separation vibration generator base on multi-group non-circular planetary gear. Trigonometric function and MATLAB software were exploited to fit separate roller angular velocity and angular displacement scatter curve. Then fitting curve of angular displacement and angular velocity were obtained as well as input and output angular displacement fitting function type, which served as the objective function of tomato fruit separation vibration generator based on multi-group non-circular planetary gear. The fitting degree with no more than 0.85 of angular displacement and velocity were obtained. The OriginPro9.0 was used to obtain angular velocity and angular displacement fitting function. According to the method of theoretical mechanics and dynamics, the theoretical equation of dynamics and kinematics were established to obtain the transmission ratio and pitch-curve equation of the non-circular gear train. Non-circular gears based on three groups were designed and gear tooth profiles of non-circular gear were generated by using gear’s pitch curve got from MATLAB. Then, the whole structure of fruit seedling vibration generator base on three group non-circular planetary gear was designed according to the selected type and corresponding parameters of gear train, which was mainly composed of input shaft assembly、tie rod assembly、shell and output shaft assembly. When this vibration generator working, power was input from the input shaft uniformly and transferred to the separation roller by transmission of this vibration generator. In this way, the uniform motion of input shaft was transformed into variable speed rotary motion of output shaft to drive the separation roller achieving the separation of fruit and stem seedlings. The model of vibration generator based on multi-group non-circular planetary gear was constructed, and this model was analyzed by simulating in the ADAMS at speeds of 111 revolutions per minute. The contrast figure of non-circular gear vibration generator and three groups non-circular gear vibration generator’s tooth surface contact force diagram was obtained by analyzing the tooth surface contact force between the planet gear and the output shaft gear, which showed that the vibration generator possessed uniform stress, and small vibration and the correctness of the model were verified. Finally, the physical prototype of vibration generator based on multi-group non-circular planetary gear was developed, and then tomato fruit seedling separation test was conducted in the way that replacing double eccentric block vibration generator with vibration generator based on multi-group non-circular planetary gear on tomato fruit seedling separation test platform, in this test, the motion process of separating drum was tracked shot using CPL-MS70k high speed camera system, whose frame rate was set to 800. The test data were analyzed and we found that the actual motion curve of drum separation fitted better with simulation curve and objective motion curve, from which maximum error was less than 0.4 rad/s, showing that the mechanism design was reasonable. This study provides a new idea for the improvement of processing tomato fruit seedling separation device.
vibration; separation; gears; harvesters; non-circular gear; planetary gear train; gear pitch curve
10.11975/j.issn.1002-6819.2017.12.005
S225.99
A
1002-6819(2017)-12-0034-06
2016-09-06
2017-06-02
国家自然科学基金资助项目(51265046)
王丽红,女,河北邯郸人,博士,教授,主要研究方向为农业装备工程。石河子 石河子大学机械电气工程学院,832003。 Email:wlh_shz@163.com
坎 杂,男,新疆精河人,博导,教授,主要研究方向为农业装备工程。石河子 石河子大学机械电气工程学院,832003。 Email:kz-shz@163.com
王丽红,张 娜,坎 杂,李成松,朱兴亮.用于番茄果秧分离的多组非圆行星轮系振动发生器设计[J].农业工程学报,2017,33(12):34-39. doi:10.11975/j.issn.1002-6819.2017.12.005 http://www.tcsae.org
Wang Lihong, Zhang Na, Kan Za, Li Chengsong, Zhu Xingliang. Design of tomato fruit separation vibration generator with multi group non-circular planetary gear[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(12): 34-39. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.12.005 http://www.tcsae.org
