基于改进模糊PID的导弹飞行轨迹误差修正反馈控制
2017-07-15王军
王军

摘要:导弹飞行中在受到外部干扰磁场和反导技术作用下,容易出现飞行轨迹误差,需要进行误差修正。提出一种基于改进模糊PID的导弹飞行轨迹误差修正反馈控制算法,进行导弹飞行轨迹误差修正的控制约束参量分析和被控对象模型构建.构建导弹在俯仰、偏航和回旋三个纵向运动通道的弹道方程,进行弹道飞行动力学分析。采用三层前向神经元网络结构进行飞行轨迹的姿态信息融合,采用Kalman滤波方法进行飞行状态变量和轨迹误差协方差估计,结合模糊PID控制方法实现导弹自适应反馈控制。仿真结果表明,采用该方法进行导弹飞行轨迹误差修正和反馈控制,导弹的定姿精度较高,从而提高了导弹的反导和突防能力。
关键词:模糊PID神经网络;导弹;飞行;控制;Kalman滤波
0引言
导弹是依靠自身动力装置推进,采用自主导航控制系统引导弹体进行目标跟踪、自动识别和摧毁打击的精确制导武器。导弹作为现代战争的主要武器,具有射程远、速度快、精度高、威力大等特点。导弹的控制制导方式很多,常见的有雷达制导、红外线制导、雷射制导等。导弹在攻击飞行过程中,容易受到对方的电磁辐射场以及其它反导装置的干扰,出现飞行轨迹误差,从而影响打击精度,甚至被拦截,需要对导弹的飞行轨迹误差进行及时自适应修正,实现误差反馈修正控制,提高导弹的准确打击能力。研究导弹的优化控制方法,在提高弹道自动驾驶仪控制系统的稳定性以及导弹的反导能力方面同样具有重要意义,相关的控制算法研究受到人们的极大关注。
彈道的飞行轨迹修正和控制建立在对导弹姿态信息的准确可靠测量和定姿的基础上,采用惯性航向姿态系统和自动驾驶仪控制系统,执行控制指令,操纵导弹完成相关的飞行导引操作。在此,导弹的控制系统是整个导弹的核心,控制算法的优化设计是基础。传统方法中,对导弹的制导控制算法主要有三轴导引方法、卡尔曼滤波方法、模糊控制方法和神经网络控制方法等,通过姿态测量和信息融合,结合相关的导引控制律实现对导弹的状态修正和姿态调整,提高了导弹飞行的稳定性,取得了一定的研究成果,其中,文献中提出一种基于Terminal滑模面下标准能量梯度修正的最陡下滑轨迹中导弹的航向校正控制模型,采用标准能量梯度方法进行控制律设计,结合Kalman姿态融合滤波进行位姿的线性跟踪,并作用在导弹的自动驾驶仪系统中,提高了导引精度,但该控制算法计算开销较大,控制反馈的实时性不好;文献中提出一种应用Lvapunove反演技术设计的参数自适应非线性跟踪控制器,在反演镇定函数中引入了积分项,实现导弹纵向非线性动力系统自适应反演积分控制,在大扰动条件下避免了导弹的动力系数和位姿定姿的剧烈变化,但该方法在受到外部干扰磁场时,容易出现稳态跟踪误差,导弹自动驾驶仪控制的全局稳定性不好。
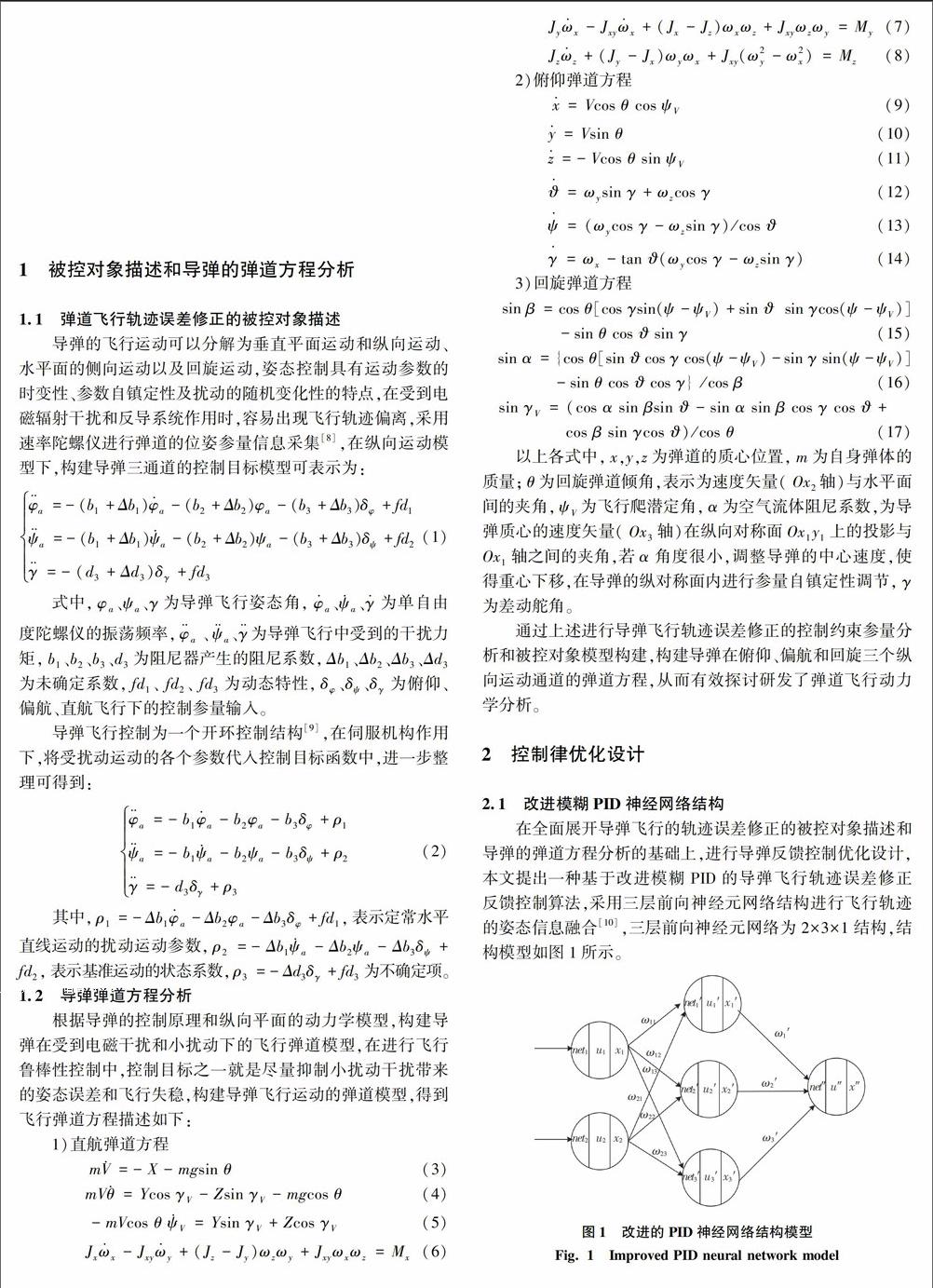
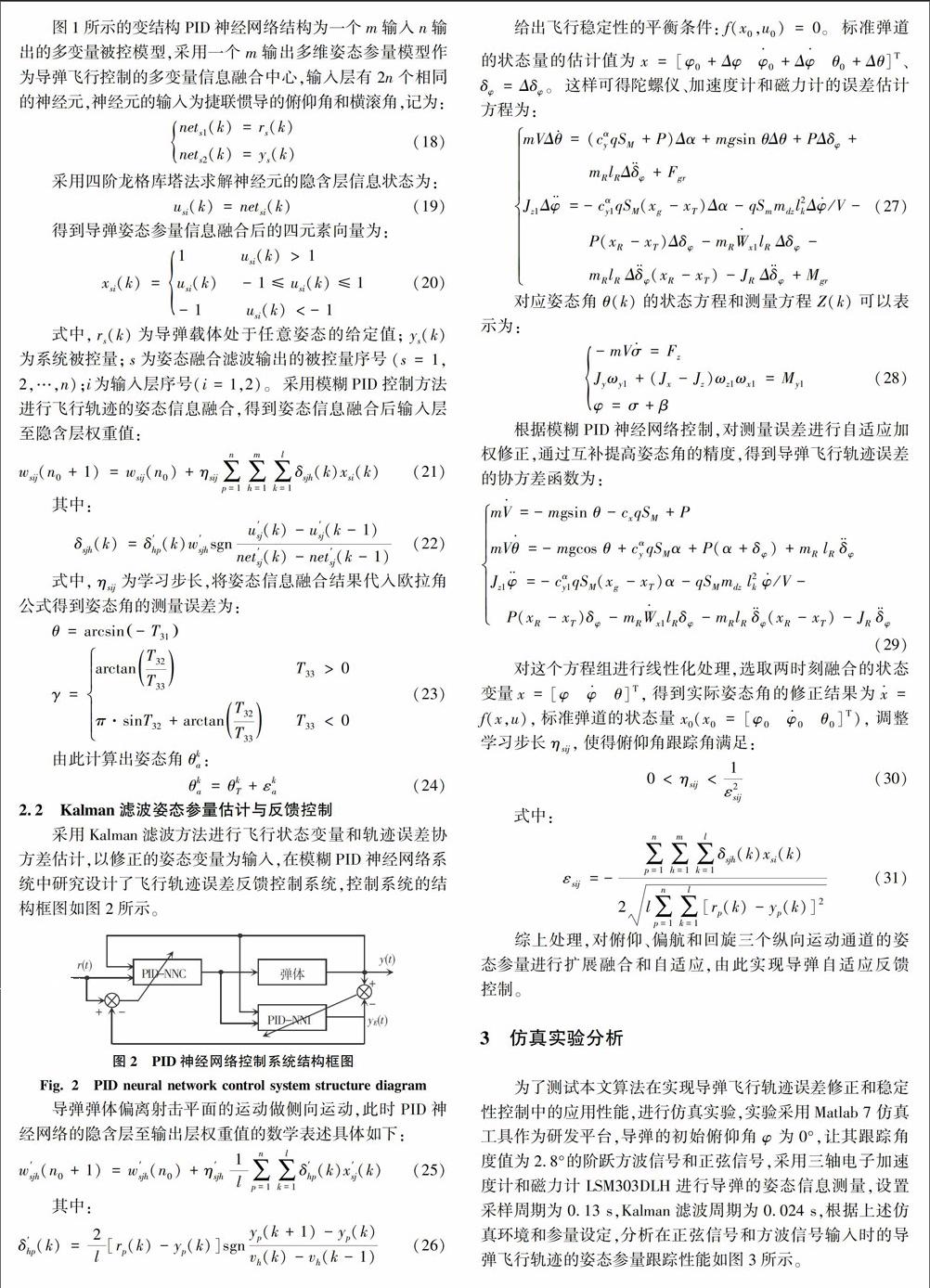
对此,本文提出一种基于改进模糊PID的导弹飞行轨迹误差修正反馈控制算法,首先进行导弹飞行轨迹误差修正的控制约束参量分析和被控对象模型构建,构建导弹在俯仰、偏航和回旋三个纵向运动通道的弹道方程,进行弹道飞行动力学分析。然后采用三层前向神经元网络结构进行飞行轨迹的姿态信息融合,采用Kalman滤波方法研究展开飞行状态变量和轨迹误差协方差估计,结合模糊PID控制方法实现导弹自适应反馈控制。最后进行方程实验分析,结果表明,本次研究提供了有益进展,并可得出有效性结论。
