船舶永磁同步推进电动机的基于滑模变结构的SVM—DTC方法
2017-07-14范辉周志丽汤天浩
范辉+周志丽+汤天浩
摘要:为解决船舶电力推进系统在螺旋桨负载受到风浪干扰时的稳定性问题,采用永磁同步电动机(Permanent Magnet Synchronous Motor, PMSM)作为推进电动机,在空间矢量调制(Space Vector Modulation,SVM)方法和直接转矩控制(Direct Torque Control,DTC)方法的基础上,提出一种基于滑模变结构的SVMDTC方法.通过
Simulink搭建模型进行船舶工况仿真,对推进电动机的转速和电磁转矩进行分析.仿真结果表明采用滑模控制的船舶电力推进系统具有很好的静态、动态特性和鲁棒性.
关键词: 船舶电力推进; 永磁同步电动机(PMSM); 空间矢量调制(SVM); 直接转矩控制(DTC); 滑膜控制
中图分类号: U665.13
文献标志码: A
Abstract: To improve the stability of the ship electric propulsion system when the propeller is suffering wind and wave disturbance, Permanent Magnet Synchronous Motors (PMSMs) are used as propulsion motors, Space Vector Modulation (SVM) method and Direct Torque Control (DTC) method are considered, and the sliding modebased SVMDTC method is proposed. A model is constructed to simulate different working conditions of ships by Simulink, and the rotational speed and the electromagnetic torque of propulsion motors are analyzed. The simulation results prove that the ship electric propulsion system based on sliding mode control is of good static and dynamic characteristics and robustness.
Key words: ship electric propulsion; Permanent Magnet Synchronous Motor (PMSM); Space Vector Modulation (SVM); Direct Torque Control (DTC); sliding mode control
0 引 言
永磁同步电动机(Permanent Magnet Synchronous Motor,PMSM)因其功率密度大和控制简便等优点,逐步取代传统的电励磁同步电动机[14],特别是采用永磁材料可以方便地构成低速电动机,用作船舶电力推进电动机来驱动螺旋桨负载[56].随着大功率变频器空间矢量调制(Space Vector Modulation,SVM)技术和直接转矩控制(Direct Torque Control,DTC)方法的发展[7],采用SVMDTC技术能直接控制同步电动机的转矩,具有优越的静、动态调速性能[8].然而,船舶航行時会受到风浪扰动,也可能遇到螺旋桨受阻或脱落等特殊工况[9],仅采用DTC会因参数变化和外部扰动加大电动机的转矩脉动,影响系统性能和运行稳定.
本文针对上述问题,提出一种基于滑模变结构的SVMDTC方法.引入滑膜控制(Sliding Mode Control,SMC)器来取代DTC中的转速PI调节器,构成SMC与DTC集成的控制方法,实现船舶PMSM的变频调速,并通过建模与仿真,验证在风浪扰动下船舶推进控制的鲁棒性.
1 船舶电力推进系统结构与建模
船舶电力推进系统一般由电动机、变流器和螺旋桨负载组成.本文采用PMSM作为推进电动机,通过采用SVM的电压型逆变器调速.
1.1 船舶PMSM的DTC系统结构
传统的PMSM的DTC利用磁链和转矩滞环比较器控制磁链和转矩实现对电动机转矩的直接控制[9],其优点是没有电流闭环,也不需要旋转坐标变换,缺点是磁链、转矩脉动大增.这种系统可采用基于空间矢量脉宽调制(Space Vector Pulse Width Modulation, SVPWM)的DTC,即SVMDTC[10].
由式(22)可知,该速度控制器的输出为转矩,它的3个分量都经过了积分器滤波,这样可以减弱抖振现象,提高系统的稳定性和精确度.
要按照一定的顺序设计SMC器的各参数.首先设定a和b的值,这是因为从式(22)可以看出a和b是指数,会导致状态变量变化迅速.逐渐增大a和b的值直到系统出现抖振,得到a或b的上限值.为防止出现抖振,a和b在这个值的基础上适当减小一点.参数c作为一个比例系数,会影响系统进入滑模面后的收敛速度.参数 ε和k 分别为变指数趋近律系数和变终端吸引趋近律系数,取值不宜过大,否则会增加滑模抖振现象.最后决定参数p和q的值(与变终端吸引趋近律的收敛时间的关系比较大).本文选取p=5,q=3,X=x1.
其中c0是常数.由该式可知,因为线性滑模面使x1按指数趋近于0,所以能够无超调地实现速度跟踪,而当系统参数或者负载发生变化时,系统运动不会变化,即在SMC下,开关面参数可决定系统的品质,与系统参数和扰动无关,因此SMC方法具有不可忽略的优势,具有很好的鲁棒性和快速性.
综上,在采用线性滑模面和新型趋近律的SMC下系统能够实现全局稳定.
2.3 基于SMCDTC的船舶电力推进系统
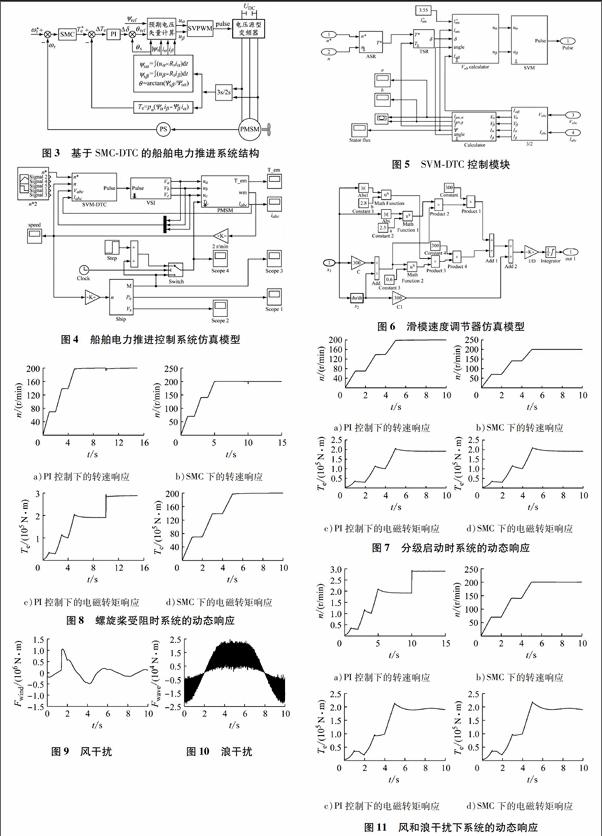
图3是采用SMC器取代PI速度调节器的PMSM DTC系统结构框图,与图1相比只有转速调节器不同,其他模块都相同.
3 系统建模与仿真
根据图3的船舶电力推进控制系统,采用Simulink建模,见图4.船桨模型选取的某实船参数[5]为:船长为182.6 m,船宽为24.8 m,吃水为5.8 m,方形系数为0.61,满载排水量为16 229 t,水线长为168.2 m,螺旋桨直径为3.6 m.
PMSM的参数为:定子电阻Rs=0.001 502 Ω;d,q轴电感Ld=Lq=0.476 7 mH;磁链Ψa=3.55 Wb;转动惯量J = 550 kg·m2;黏滞摩擦系数B = 0;极对数p′=8;额定转速200 r/min,逆变器开关频率10 kHz.
SVMDTC的仿真模型如图5所示,包括坐标变化、磁链转矩估算模块、转速调节器、转矩调节器、参考电压生成模块和SVPWM模块.转速PI调节器比例因数Kp=40 000,积分因数KI=20 000,限幅值为195 200×1.5.
基于SMC的转速调节器的仿真结构如图6所示,参数为a=2.5,b=2.8,c=300,p=3,q=5,X=x1,ε = k=300,限幅值为195 200×1.5.轉矩调节器的比例因数Kp=0.01,积分因数KI=0.01,限幅值为0.1.
仿真试验的结果如下:
(1)船舶正航,仿真时间设为10 s, 分三级启动,给定t=1, 3, 5 s 时转速分别为70, 140, 200 r/min, 仿真波形见图7.由图7a)和7b)可以看出,基于SMC的转速响应很快,可以准确地跟随给定转速,且转速最高为200.15 r/min,超调量较小.然而,在PI控制下,当t=5 s时转速为198 r/min,缓慢增至200 r/min.因为螺旋桨负载转矩随转速变化,采用SMC时,电磁转矩最大值为2.11×105 N·m,比PI调节时的最大转矩2.07×105 N·m大,最终都稳定在1.92×105 N·m左右,波形放大后发现采用SMC的转矩脉动小于采用PI调节的转矩脉动.
(2)螺旋桨受阻,在t=15,10 s时突加0.5倍的转矩负载,结果见图8.
(3)风和浪干扰下分级启动,仿真时间设为10 s.图9和10分别为风和浪干扰,得到的系统动态响应波形见图11.
从图11a)和11b)可以看出:存在风浪干扰时,两种控制下的转速波形都比较稳定,说明系统控制效果不错;PI调节器受影响稍大,转速存在比较大的波动,而基于SMC的转速波形比较稳定.图11c)和11d)给出的转矩波形基本一致.
4 结 论
针对船舶永磁同步电动机(PMSM)在风和浪的干扰下驱动螺旋桨时的转矩波动问题,在空间矢量调制(SVM)和直接转矩控制(DTC)的基础上,提出一种基于滑模控制(SMC)的SMCDTC的方法,采用SMC器代替PI转速调节器.在SMC中引入新型趋近律设计SMC器并证明其收敛性.
仿真试验分析比较了基于SVMDTC和SMCDTC的船舶电力推进系统,结果表明:当负载转矩突增或突减时PMSM转速急剧变化;SMC较PI调节的转速变化小且调节快,转矩脉动也小,动态性能较好.
由此可知,基于SMC的PMSM SVMDTC系统具有更小的转速超调和更好的鲁棒性,能够减小转矩脉动,从而提高交流调速系统的动态品质和船舶电力推进系统的整体性能.
参考文献:
[1]CHU W Q, ZHU Z Q, CHEN J T. Simplified analytical optimization and comparision of torque densities between electrically excited and permanent magnet machines[J]. IEEE Transactions on Industrial Electronics, 2014, 61(9): 50005011.
[2]ZHU Z Q. Novel permanent magnet machineschallenges and applications[C]//Keynote Speech at International Conference on NdFeB Magnets, Supply Chain, Critical Properties & Applications, March 2014, A03: 110.
[3]HASSANNIA A, DARABI A. Design and performance analysis of superconducting rimdriven synchronous motors for marine propulsion[J]. IEEE Transactions on Applied Superconductivity, 2014, 24(1): 200207.
[4]GAMBLE B, SNITCHLER G, MACDONALD T. Full power test on a 36.5 MW HTS propulsion motor[J]. IEEE Transactions on Applied Superconductivity, 2011, 21(3): 10831088.
[5]马伟民. 舰船综合电力系统中的机电能量转换技术[J]. 电气工程学报, 2015, 10(4): 310.
[6]汤天浩. 船舶电力推进系统[M]. 北京: 机械工业出版社, 2015: 174177.
[7]BERNERT S. Development of high power converters for industry and traction applications[J]. IEEE Transactions on Power Electronics, 2000, 15(6): 11021117.
[8]ZHONG L, RAHMAN M F, HU W Y. Analysis of direct torque control in permanent magnet synchronous motor drivers[J]. IEEE Transactions on Power Electronics, 1997, 12(3): 528535.
[9]LI D, WANG Z, CHI H. Chebyshev fitting way and error analysis for propeller atlas across four quadrants[J]. Journal of Marine Science and Application, 2002, 1(1): 5259.
[10]SWEIERCZYNSKI D, KAZMIERKOWSKI M P. Direct torque control of Permanent Magnet Synchronous Motor (PMSM) using space vector modulation (DTCSVM) simulation and experimental results[C]//28th Annual Conference of the IEEE Industrial Electronics Society, 2002(1): 751755.
[11]HUANG H, SHEN A D, CHU J. Research on propeller dynamic load simulation system of electric propulsion ship[J]. China Ocean Engineering, 2013, 27(2): 255263.
[12]HUNG J Y, GAO W, HUNG J C. Variable structure control: a survey [J]. IEEE Transactions on Industrial Electronics, 1993, 40(1): 222.
[13]KAWAMURA A, ITOH H, SAKAMOTO K. Chattering reduction of disturbance observer based sliding mode control[J]. IEEE Transactions on Industry Applications, 1994, 30(2): 456461.
(編辑 赵勉)
