基于频谱细化的干扰磁场自主标定方法
2017-07-12徐渊源祁克玉
徐渊源,祁克玉
(机电动态控制重点实验室,陕西 西安 710065)
基于频谱细化的干扰磁场自主标定方法
徐渊源,祁克玉
(机电动态控制重点实验室,陕西 西安 710065)
针对基于磁传感器的二维弹道修正引信滚转角测量中翼面干扰磁场影响测量精度问题,提出了基于频谱细化的干扰磁场自主标定方法。该方法通过频谱细化以及相关特征值计算得到磁传感器信号中干扰磁场信号的幅值、相位信息,再根据翼面与弹丸之间的相对转速测量结果,重构翼面干扰磁场信号,然后将磁传感器的输出信号中减去该重构信号,比较精确地得到地磁场在磁传感器中的分量,实现了干扰磁场的标定。仿真结果表明,该方法能够较好地消除翼面干扰磁场对地磁信号的影响,从而提高引信滚转角解算精度,使其满足二维弹道修正引信滚转角测量要求。
二维弹道修正;滚转角;频谱细化;地磁测量
0 引言
二维弹道修正引信是实现低成本精确打击的有效手段,也是目前的研究热点,其中的滚转角解算是实现弹道修正的基础和关键[1]。地磁传感器具有体积小、成本低、无累积误差、动态范围宽、隐蔽性好、抗高过载等特性,能够较好地满足二维弹道修正引信的要求。利用地磁传感器测量二维弹道修正引信滚转角的过程中,引信固定在修正翼面上的载体磁性材料会影响磁传感器所在空间的磁场,使得磁传感器测量地磁场过程中存在着一定的误差,影响弹体滚转角解算的准确性。
在工程应用中,可通过地磁检测系统远离载体磁干扰源的方法来减小地磁场检测误差,然而该方法会影响引信修正组件的整体外形结构。为了提高地磁场检测精度,常用的载体磁场补偿方法主要有自差补偿法、基于椭圆假设的磁场补偿方法等[2]。在此基础上随着三轴捷联式磁传感器的广泛应用,有学者提出“二维磁场测量轨迹的椭圆方法”[3],该方法补偿精度较高,但该方法为非线性参数估计、计算量较大,且不适合应用于修正引信外弹道环境中翼面磁场高速旋转的情况。二维弹道修正研究中使用过测试标定方法,在一定程度上补偿了翼面干扰磁场造成的测量误差,但方法需要大量地面翼面高速转动测量数据,样机标定准备工作量较大、精度不高。本文针对此问题,提出了基于频谱细化的干扰磁场自主标定方法。
1 干扰磁场对滚转角解算影响及频谱细化方法
1.1 翼面干扰磁场对滚转角测量的影响
弹丸滚转角磁测系统是以地球磁场作为测量标准,由于地理条件的差异,不同经纬度、不同高度测试点的地磁场之间存在一定差异[4],经纬度每变化1°,地磁场的3个分量不会有大的变化。经度或纬度每变化1°地面距离变化在110 km左右,故在一般常规炮弹的射程范围内,可假设地磁场矢量为一个常量[5],干扰磁场主要来自旋转的翼面。
二维弹道修正引信的外形结构如图1所示:修正翼面由电机驱动,电机的磁缸为修正翼面结构的一部分,磁缸内有大量磁材料贴片,工作时修正翼面中的磁缸和引信会产生相对转动,即翼面磁场跟随翼面绕引信上的磁传感器相对转动,地磁矢量、翼面磁场矢量均相对磁传感器高速旋转。由于翼面磁场的存在,造成地磁测量信号叠加噪声,使磁传感器测量地磁场过程中存在着一定的误差,对引信滚转角的实时准确解算精度造成影响。但是,相同转速下这种干扰在地面与在空中是相同的,因此可以通过地面测试、标定的方法排除干扰。
1.2 地面测试方法标定干扰磁场
载体磁场误差是由于安装在磁传感器周围存在的各种磁性材料造成的测量误差,可分为硬磁材料磁场、软磁材料磁场及随机磁场等主要误差。经过研究表明,在弹箭、船舶、飞机等运动载体中,硬磁材料磁场和软磁材料磁场时载体磁场的主要分量,而随即磁场可以选择合适的安装位置和合理的布线方式减小其对磁传感器的影响。
地面测试方法标定干扰磁场的原理如图2所示,首先需测量修正翼面在不同转速的情况下三轴磁传感器输出:Hmx、Hmy、Hmz。在不考虑测量误差时,干扰磁场在捷联式磁传感器x、y轴上的测量值近似为干扰磁场矢量在两个正交坐标轴上的投影。再根据磁传感器在当前转速情况下测量值拟合输出曲线,计算干扰磁场幅值、相位等相关拟合参数,再由拟合参数标定干扰磁场。

图2 地面测试方法标定干扰磁场原理图
Fig.2 Ground test method for calibrating magnetic field
1.3 频谱细化方法
频谱分析是信号处理中最常用的方法,能够广泛应用于窄带信号分析、图像处理、故障诊断等诸多领域,具有重要的理论意义和实用价值。传统的频谱分析方法一般采用快速傅里叶变换(FFT)得到的是整个折叠频率上的粗略的“全景频谱”,FFT算法中频率分辨率和采样点数成反比,在采样频率不变的前提下,若要提高频率分辨率只能在整个分析频段上增加变换点数,这会导致计算量的显著增加,制约了分析精度的提高。
为了解决对窄带频谱区间进行细致观测的问题,提出了频谱细化的概念,其基本思路是对信号频谱中的某一感兴趣的频段进行局部放大,实现选带分析。频谱细化技术近年来发展迅速,常见算法有:FFT-FS算法、ZOOM-FFT(简称ZFFT)算法和线性调频Z变换(Chirp-Z变换,简称CZT)算法。频率估计在通信信号处理中占有重要地位,线性调频Z变换算法以其直接、快速、经济的特点适用于当前对频率估计快速、高精度的要求。
线性调频Z变换基本原理[6]:
已知的时间序列x(n)(0≤n≤N-1),其Z变换为:
(1)
传统的N点快速傅里叶变换计算的频谱实际上是z平面单位圆上的N点等间隔取样,CZT计算的则是z平面螺旋线周线上Z变换的等间隔取样,这些取样在螺旋线的某一部分上按等角度分布。X(z)表示序列x(n)的Z变换,利用CZT算法,可以计算下列给定点zk上的X(zk)。
zk=AW-k,k=0,1,2,…,M-1
(2)
式中,A=A0ejθ0,W=W0ejφ0
A0表示起始抽样点z0的矢量半径长度;θ0表示起始抽样点z0的相角;W0表示螺旋线的伸展率;φ0表示相邻两抽样点之间的角度差;M表示所要分析复频谱的取样点数,不一定等于N。将zk代入x(n)的Z变换表达式中,则:
(3)
令:
(4)
于是:
(5)
其中:
(6)
上述便是CZT频谱细化算法的基本原理,其计算流程如图3所示。
频谱细化方法可以将傅里叶变换点集中在特征谐波所在的局部频段,信号频谱中的某一感兴趣频段进行局部放大,实现选带分析,可在短时、有限采样点数对信号进行有效分析,提高局部频率分辨率。该方法克服频谱泄漏和栅栏效应带来的不利影响,提高特征谐波的分析精度。采样信号频率为137.6Hz、分辨率为5Hz时,使用FFT和频谱细化进行频谱分析得到的结果如图4所示,可根据细化后的频谱相对精确计算该信号的幅值、频率和相位等信息。
2 基于频谱细化的干扰磁场自主标定方法
常见的测试标定方法需要大量的地面翼面旋转测试数据,由于地磁场为弱磁场且每发修正机构内部磁贴片排布具有细微差异,每发产品在发射前必须单独进行干扰磁场标定,且测试数据量越大标定越精确,故该方法工作量大、过程相对复杂。外弹道环境下翼面干扰磁场在磁传感器上敏感轴上的分量具有一定的变化规律,通过对干扰磁场特性分析后,提出新的标定方法。
2.1 外弹道干扰磁场变化特性
发射后,引信随弹丸相对大地平稳右旋,固连在引信中的磁传感器跟随弹体右旋切割其所在空间地磁场矢量;翼面相对引信左旋,翼面磁场矢量场环绕磁传感器x轴左旋。如图5所示,假设翼面磁场在引信径向横切面的投影为Br,在t=0时引信径向横切面内Br与Z轴的初始夹角为φ0,翼面相对引信转角为φ,弹底前视时,定义由OZ轴逆时针转向Br为正。
电力调度信息化是电力信息化的重要组成部分,水电、火电的调度都需要计算机监控系统及时监测调度信息,进行故障的预警提示和电力调度线路的保护。目前,我国的网络技术主要运用在电力调度的监控环节,即对发电生产自动化的监控、变电情况的监控和输电线路状态的监控。为满足电力调度的可靠性和实效性,电力调度自动化系统应运而生。其中,主要的电力自动化调度系统有SCADA系统和EMS系统。
弹丸飞行过程中,翼面相对引信的转速会随着弹丸飞行时间变化而发生变化,但在一段较短的时间内,可将翼面磁场频率f、磁分量Br近似视为常量。则翼面干扰磁场在磁传感器z轴上的投影为以Br为幅值、以f为频率、以φt0为相位的余弦信号:
Brcos(2πft+φt0)
(7)
其中,φt0的大小与分析翼面干扰磁场起始时间、翼面相对磁传感器旋转角度位置有关,若每次分析时刻初始的相对转角选取同一角度(比如选择相对转角为0°)时,相位φt0则为一固定值。
2.2 基于频谱细化法的自主标定
由于翼面干扰磁场具有短时内可视为周期性信号的特性,故使用频谱细化方法对其进行标定,原理如图6所示。
不同于地面测试标定方法,基于频谱细化的自主标定为发射后标定,无需进行地面风动修正翼面在多种转速旋转情况下的磁传感器测试数据拟合计算,标定过程为:1)根据需要实时选取外弹道环境中磁传感器的一段短时输出进行FFT;2)结合相对转速信息,在干扰磁场频带周围选取起始频率fa和终止频率fb,在不增加采样数据长度的前提下,将选取频段的离散傅里叶变换曲线转换成连续的曲线,细化频谱;3)接下来用处理后得到连续化频谱进行计算,得到干扰磁场的幅值、相位信息;4)最终结合相对转速测量信息标定干扰磁场。
3 仿真验证
3.1 仿真信号的干扰磁场标定
引信在外弹道中随弹丸相对大地平稳右旋,修正翼面相对引信左旋,故发射后翼面相对于引信的转速大于引信相对于地面的转速,且随着时间的推移慢慢下降。仿真时,设一段短时内:
翼面干扰磁场信号:幅值为2.5,相位为7π/9,频率为f1=239.2 Hz,由式(7)将其表示为:
x1(t)=2.5cos(2π·239.2t+7π/9)
地磁场信号:幅值为5,相位为π/6,频率为f2=190 Hz,可将其表示为:
x2(t)=5cos(2π·190t+π/6)
则磁传感器z轴上的输出为:
x(t)=2.5cos(2π·239.2t+7π/9)+
5cos(2π·190t+π/6)
采样率为fs=20 000 Hz,采样点数为N=2 000个,即采样时间为0.1 s时翼面干扰信号按照图6的流程标定过程如下:
第一步,FFT:取磁传感器径向敏感轴的一段输出的信号进行快速傅里叶变换(FFT),处理得到整个叠加信号频率上的粗略频谱,如图7(a)所示,可以看出磁传感器的输出为地磁场和翼面干扰磁场的叠加信号,其频谱含有两个频率分量。
第二步,频谱细化:结合相对转角信息,可以判断出上述信号中幅值较大的低频成分为地磁信号,频率在190 Hz附近;幅值较小频率较高的成分为翼面干扰磁信号,频率在240 Hz附近。选取细化频段的起始频率fa=220 Hz和终止频率fb=260 Hz。对fa~fb频谱进行细化分析,将离散的傅里叶变换频谱进行连续化处理,结果如图8所示。
第三步,特征值计算:处理后得到连续化频谱,频谱每个点为一个复数值。该点的模值对应该频率值下的幅度特性,该点的相位对应该频率值下的相位特性。细化谱的点的模值为信号峰值A的N/2倍(N为采样点数),相位可以通过实部、虚部的反正切关系求得其相位φ。幅值、相位计算结果如表1所示。
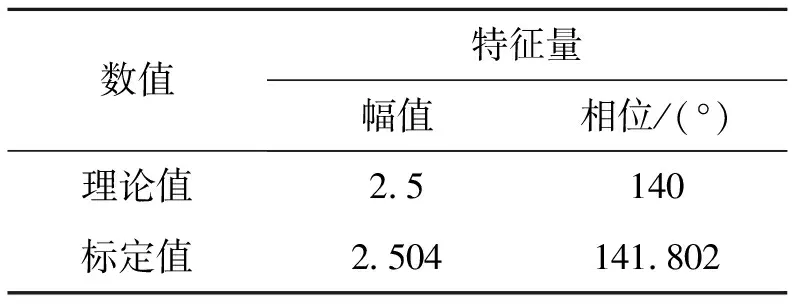
表1 幅值、相位计算结果
第四步,干扰磁场标定:再根据翼面与弹丸之间的相对转角测量结果得到翼面干扰信号的频率f,便可重构翼面干扰磁场:Acos(2πft+φ),实现干扰磁场标定,标定误差如表2所示。

表2 干扰磁场信号标定误差
最终经过标定后的磁传感器输出信号波形如图7(b),通过频谱可以看到翼面干扰磁信号成分基本消除,对干扰磁场信号的误差进行了有效的补偿。补偿误差后的信号进行滚转角解算,解算误差如图9所示:磁传感器原输出的叠加磁干扰噪声信号直接解算滚转角的最大误差值为30°,均方差为20.83°;利用频谱细化进行翼面干扰磁场标定后,干扰磁信号显著降低,滚转角的解算误差最大值降至4.15°,均方差为1.55°。
由仿真结果表明:使用频谱细化方法,通过处理采样0.1 s的数据便可对干扰磁场进行比较精确的标定,大幅地抑制翼面干扰磁信号对地磁信号检测精度的影响,并且能够实现实时标定,使地磁场测量误差得到了有效的补偿。地面测试标定方法需要地面的连线及测试工作,需要数小时才能完成。相对于地面测试标定方法,基于频谱细化的干扰磁场自主标定方法可在短时内对翼面干扰磁场进行有效标定,节省了标定的工作量,提高了标定精度。
通过进一步的仿真分析发现,虽然部分数据会出现波动,但整体满足:信号采样时间越长,即采样点数越多,标定的精度越高;若采样时间相同时,干扰信号频率和地磁信号频率有关,两个频率大小相差越大,标定的精度越高,两个频率接近时,标定的精度会相应降低。
3.2 实测数据的干扰磁场标定
为了验证本文提出的干扰磁场标定方法的有效性,以155 mm底排榴弹为平台的外场实测数据进行回读,从弹丸发射20 s后,取0.1 s的数据进行分析如图10所示。
图10(a)为磁传感器原输出信号的时域波形及频谱,其频谱主要含有两个频率分量,幅值较大的低频成分为地磁信号,幅值较小的高频成分为翼面干扰磁信号。干扰磁场标定后的结果如图10(b)所示,经过标定后的输出信号时域波形为基本为正弦信号(即地磁场信号),翼面干扰磁信号分量得到有效的消除。
4 结论
本文提出了基于频谱细化的二维弹道修正引信干扰磁场自主标定方法。该方法通过频谱细化以及相关特征值计算得到磁传感器信号中干扰磁场信号的幅值、相位信息,再根据翼面与弹丸之间的相对转速测量结果得到其频率信息,重构翼面干扰磁场信号,然后将磁传感器的输出信号中减去该重构信号,比较精确地得到地磁场在磁传感器中的分量,从而实现了干扰磁场的标定。仿真结果表明,该方法能够较好地消除翼面干扰磁场对地磁信号的影响,从而提高引信滚转角解算精度,其误差保持在±5°以内,满足二维弹道修正引信滚转角测量要求。但由于频谱细化分析信号的精度和信号采样长度有关,故在工程实践中,需要根据实际问题选择满足其精度要求的相应采样长度进行计算。
[1]杨恺华,祁克玉,王芹.基于模糊控制的二维弹道修正引信滚转角控制算法[J].探测与控制学报,2015,37(2):19-23.
[2]黄学功,王灵.地磁信号检测系统误差分析与补偿方法研究[J].兵工学报,2011(1):33-36.
[3]GEBRE E D.Magnetometer auto calibration leveraging measurement locus constraints[J]. Journal of Aircraft ,2007,44(4):1361-1368.
[4]李兴城,牛宏宇.基于磁阻传感器的旋转弹姿态测量算法研究[J].计算机仿真,2012(5):51-54.
[5]卢志才,高敏,贾春宁.基于地磁信息的火箭弹滚转角测量系统研究[J].中国测试,2014(3):1-4.
[6]赵宏强.频谱细化算法分析[J].四川兵工学报,2013(5):105-109.
A Self-Calibration Method of Interfering Magnetic Field Based on Spectrum Zoom
XU Yuanyuan,QI Keyu
(Science and Technology on Electromechanical Dynamic Control Laboratory, Xi’an 710065,China)
The airfoil interference magnetic field influences the accuracy of the roll angle measurement in two-dimensional trajectory correction fuze which based on the magnetic sensor.To solve the problem, a self-calibration method of interfering magnetic field based on spectrum refinement was proposed. This method could obtain the amplitude and phase information of the interference magnetic field signal from the magnetic sensor’s output by spectrum zoom and related eigenvalue calculation. Then, the airfoil interfering magnetic field signal with the relative speed measurement between airfoil and pellet was reconstituted. Next, the reconstituted signal was subtracted from the signal of the magnetic sensor’s output, and the components of the geomagnetic field in the magnetic sensor were obtained more accurately. finally, the calibration of the interfering magnetic field was realized. Simulation results indicated that this method could eliminate the influence of the airfield interfering magnetic field on the geomagnetic signal, improve the resolving accuracy of the fuze’s roll angle and made it to meet the requirement of the roll angle measurement in two-dimensional trajectory correction projectile system.
two-dimensional trajectory correction;roll angle;spectrum zoom;geomagnetic measurement
2017-01-17
徐渊源(1988—),男,陕西商洛人,硕士研究生,研究方向:弹道修正引信。E-mail:694256103@qq.com。
TJ43
A
1008-1194(2017)03-0048-06