基于3DSLAM移动扫描技术的地下空间测量方法研究
2017-07-07王孟和储征伟郑勇赵斌
王孟和,储征伟,郑勇,赵斌
(1.南京市测绘勘察研究院股份有限公司,江苏 南京 210019; 2.北京华泰天宇科技有限公司,北京 100029)
基于3DSLAM移动扫描技术的地下空间测量方法研究
王孟和1*,储征伟1,郑勇2,赵斌2
(1.南京市测绘勘察研究院股份有限公司,江苏 南京 210019; 2.北京华泰天宇科技有限公司,北京 100029)
针对传统的城市地下空间测量方法存在的困难和问题,试验了一种基于3DSLAM(Simultaneous Localization And Mapping—实时定位与制图)移动扫描技术的地下空间测量新方法。采用iMS3D三维移动测量扫描仪对南京市新街口地区的地下空间进行了扫描测量,分别对地下停车场、地下通道、地下商场等不同类型的地下空间进行了快速高效的三维激光点云数据采集和实景影像采集,通过后处理软件,实现了对不同地下空间结构的测量,测量结果满足相关规范要求,同时还实现了对地下空间主要建(构)筑物的三维建模及实景影像管理。试验结果表明:该技术不仅可以快速有效地对地下空间进行快速有效的数据采集和测量,还可以同步构建三维模型及实景影像,为城市地下空间测量提供了一种新的技术手段。
地下空间测量;三维激光点云数据;3D SLAM移动扫描技术;实景影像
1 引 言
地下空间是指为了满足人类社会生产、生活、交通、环保、能源、安全、防灾减灾等需求,而在城市规划区内地表以下进行开发、建设与利用的空间及与之相连的下沉式空间[1]。近年来,随着中国经济持续快速发展与城市化水平的提高,中国城市地下空间开发利用得到了大发展,其主要成就表现在:
(1)城市地铁建设的快速发展带动了城市地下空间资源的大规模开发利用。地铁建设推进了城市定向、有序的发展,并带动地铁沿线房地产业的发展和地下商业交通的开发利用;
(2)城市高层建筑的“上天入地”推进了城市空间的立体开发;
(3)充分开发利用地下空间资源的防护潜能,提高了城市综合防灾抗毁能力;
(4)城市地下空间的开发利用已步入法制化轨道。
为加强对城市地下空间的开发利用和管理,促进地下空间合理开发利用,适应城市发展需要,我国重庆、上海、广州、深圳等多个城市规划部门制定了城市地下空间开发利用管理办法[1]。结合城市地下空间测量与普查,制订了专门的地下空间测量规范和技术规程,使得地下空间测量有了科学的技术依据。城市地下空间的开发利用越来越充分,而采用科学有效的测量手段,获取城市地下空间的二维、三维数据,将显得尤为重要。
城市地下空间测量是一个全新的测量研究领域,是地下空间开发利用管理的基础工作。地上部分采用传统测量方法进行测量;联系测量和地下起算数据传递采用联系三角形法、陀螺经纬仪和铅垂仪组合法、导线直接传递法以及激光投点法[1,2];地下测量采用数字测量技术,对于非可接触地下空间设施的探测则可采用高密度电法、地质雷达等城市物探技术。通过测量获取的属性主要是地下空间设施的空间位置属性,比如坐标、高程、宽度、净空等。
对地下空间三维信息获取困难的问题,科研工作者研发了各种地下空间移动激光测量系统。包括动态测量部分和静态纠正部分,动态测量部分由线阵激光扫描仪、高精度IMU和里程计等传感器高度集成,安装在轻便的移动平台上,在移动过程中快速获取地下空间三维点云信息;静态纠正部分由一系列三维空间合作标靶组成,根据一定原则分布在地下空间中,其作用相当于控制点组合,对移动测量系统获取数据进行位置和姿态纠正[3]。而跨界而来的SLAM技术的出现,将大幅提高地下空间三维数据采集的效率。
2 城市地下空间测量难点和瓶颈
城市地下空间具有其独特的机构特征,地表地物的测量技术手段在城市地下空间进行测量时往往遇到很多难以攻克的技术难点和技术瓶颈。
(1)城市地下空间结构复杂,单一技术手段难以一次性获取全貌数据。
城市地下空间结构复杂。本次测试环境中,有地下停车场、地下通道、地下商场等,每种地下空间的结构复杂,且内部结构不规整,采用单一的测量技术手段非常难以一次性获取整体的地下空间数据。采用传统的技术手段进行地下空间测量,往往需要多种技术手段结合使用,而且很容易遗漏一些区域,且实际操作过程也是十分复杂的。尤其是有一些地下空间属于异形结构,传统测量技术手段难以完成测量。
(2)地下空间难以直接使用GPS信号辅助测量。
在进行地下空间测量过程中,难以依赖GPS导航定位信号,而传统的测量仪器往往无法进行室内的测量。迫切需要一种新的技术手段,能取代传统高度依赖GPS等技术手段的作业方式。
(3)可供测量开放的时间有限,要求测量手段高效便捷。
城市地下空间按照其是否对外开放来划分,暂且可分为对公众开放空间和非开放空间。公众开放空间比如地铁、地下商场、停车场等,这些空间在营业时间人流密集,人群、车辆等可移动物对传统测量、静态三维激光扫描、移动三维激光扫描等测量方式的影响均较大。所以,一般对城市地下空间的测量或者三维激光扫描要选择人群稀少或者夜晚进行,作业时间有限。
非开放空间的进入审核严格,比如人防工程、地铁站台空间、地下市政设施空间等。在每次进行测量时,需得到管理部门许可后方可进入,且能够进行测量的时间非常有限。如果用静态架站的方法来做,因为工期过长,几乎无法实现。
综上所述,城市地下空间测量必须要求测量手段简单快捷,测量速度快,效率高。
为了有效解决上述问题,进行了本次试验,选用北京华泰天宇科技有限公司的三维移动扫描设备(iMS3D),对南京中央商厦地下两层停车场、莱迪广场地下商场、天安国际地下停车场、南方证券地下一层停车场(含斜坡)、商贸大厦地下停车场、淮海路地下通道等地下空间进行了扫描测量。试验结果表明,iMS3D可以有效地解决复杂地下空间、异形结构、碎部结构测量的问题以及地下空间难以直接使用GPS信号辅助测量的难题,且其扫描效率是传统测量手段和静态激光扫描效率的数倍,每小时可采集数万平方米的三维点云数据,可有效利用许可作业时间,以最快的速度采集城市地下空间的三维点云数据。
3 基于3DSLAM的三维移动扫描关键技术
(1)基于实时定位与制图(SLAM)的城市地下空间数据采集技术
目前移动测量系统主要指基于机动车辆的移动道路测量系统。其中,移动道路测量系统通过机动车上装配的GPS、INS、数码相机、数码摄像机和激光雷达等设备,在车辆高速行进之中,快速采集道路及道路两旁地物的空间位置数据[3],特别适合于公路、铁路和电力线等带状地区的基础信息获取。
这种技术是完全基于GNSS的位置服务的,一旦进入地下空间,就完全失去作用。
地面激光扫描技术是一种从复杂实体或实景中重建目标全景三维数据及模型的技术。激光扫描技术突破了传统的单点测量方式,具有速度快、非接触、高密度、自动化等特性,是继GPS后测绘领域又一次重大技术革新。激光扫描技术标志性的设备——激光扫描仪是从主动式非接触激光测距仪发展而来。非接触激光测距的方式主要有基于三角原理的单点式、直线式、结构光式测距和基于飞行时间法的脉冲式、相位式。地面激光扫描仪(Terrestrial Laser Scanner,TLS)是采用主动式非接触激光测距,通过扫描镜及伺服马达实现三维扫描,高速度、高密度、高精度地获取目标表面三维点坐标及纹理的信息采集系统。
目前进行三维扫描常见的技术设备有两大类:一类是静态扫描仪,这些设备在城市地下空间扫描时需要事先进行导线布设,然后在布设的已知点上进行一站一站的扫描,处理数据时需要拼接点云,效率特别低,不适合在海量的城市地下空间扫描中应用。另一类是三维移动扫描设备。首先大多数的技术设备配备有高精度的惯性导航系统,设备成本和使用成本高,不利于进行海量城市地下空间数据采集;其次设备在使用的过程中需要在已知点上严格对中整平,每次采集之前所花费的时间很长,工作效率非常低。
基于实时定位与制图(SLAM)的城市地下空间三维数据采集技术将激光扫描技术与移动测量技术的优势相结合,形成一项全新的三维移动测量技术。该技术通过激光点云扫描所在环境的特征点,通过特征点来反算扫描机器所在的位置,实现在没有GPS信号和复杂惯性导航系统的环境下,仅依靠设备自身配置的简单惯性测量装置,使用SLAM算法来实现同步定位与制图的目的,有效解决了地下空间难以直接使用导航信号辅助测量的难题,实现城市地下空间数据的快速、便捷、低成本的采集。
基于实时定位与制图(SLAM)的移动测量的技术关键在于,在没有GPS的支持下的,如何解决室内高精度定位的问题。SLAM的全称叫同步定位与制图,与传统测绘或者扫描最大的区别在于,它不需要位置服务,也不需要测量基准,它是靠扫描周边的环境进行自身定位,同时靠连续匹配周边环境特征,从而生成高精度三维数据,以iMS3D为例,其高精度SLAM算法可以保证 1 cm的精度。
(2)全景影像与激光点云同步采集与匹配的关键技术
三维激光扫描仪作为获取三维空间数据的重要手段,能够快速、准确、大量地获得物体的空间几何信息,而高分辨率数码相机能够得到高质量的二维纹理数据,两者对目标的描述具有互补性。这两者的结合可生成精确、真实的三维世界,为虚拟三维环境的构建提供了很好的数据支撑。因此,激光扫描点云与光学影像这两种数据的融合处理在三维建模、地物识别、虚拟场景可视化等方面具有非常重要的意义[4]。
SLAM移动测量,对点云与相机匹配有更高的要求,二者必须在移动中有精准的姿态匹配,才能保证点云的色彩精度以及建模的纹理。
以iMS3D为例,在原始姿态数据的基础上,采取了用SLAM对空间姿态数据进行优化的算法,原始姿态和优化后的姿态都可以输出,任意一个激光头的数据,和全景的影像数据,都可以独立输出精准的姿态数据,在此基础上,可以在随机或者任意第三方软件中,将影像和点云进行匹配,可以同步显示,也可以独立显示。
(3)SLAM移动扫描中的连续特征匹配关键技术
相对于无人驾驶的SLAM技术,地下空间的3DSLAM算法要复杂很多,无人驾驶只需要对实时数据负责,并不关心连续的特征匹配,而移动测量必须经过POS精算,闭合环检测和连续特征匹配的高精度算法,才可以保证数据的自动拼接(直接计算完整三维激光点云,无须人工拼接),才可以保证厘米级精度。
从这个意义上来说,并不是所有号称采用SLAM技术的产品,都可以满足地下空间测量的要求,只有采用了3D SLAM高精度算法的设备才能保证地下空间测量的三维数据精度要求。
4 试验过程及试验结果分析
此次扫描试验选择了南京中央商厦地下两层停车场、莱迪广场地下商场、天安国际地下停车场、南方证券地下一层停车场(含斜坡)、商贸大厦地下停车场、淮海路地下通道等。
利用基于3D SLAM技术的iMS3D(室内三维移动扫描仪)采集地下空间中各类地物的三维激光点云,作为原始数据存储入库。
由于这种新的技术方法无成熟经验借鉴,试验团队结合以往传统测量的经验,根据地下空间测量的特殊性,结合iMS3D的技术特点开展了有开创性的试验工作。正式作业前认真踏勘了试验区域,针对需要测量的地下空间走向、拐点位置、空间大小等进行分析,设计了不同的采集路线,制定了严格的作业方案。在采集过程中,严格控制行进速度和姿态,对于难以采集到的区域,改用手持式三维扫描仪DPI-8进行补充扫描。
基于激光扫描数据处理的PPVISION软件平台,利用分类算法对激光点云数据进行过滤,将建筑物、管道设施等地物数据进行分离、提取。
①点云配准、编辑、过滤、抽稀、特征识别、建模、颜色映射;
②点云切片、围框裁剪;
③基于点云的3D量测功能;
④基于点云绘制点、线、面地物;
⑤基于点云三维建模;
⑥多种绘图、建模、拟合工具;
⑦属性标注;
⑧点云中插入三维模型,用于方案比对、分析等;
⑨点云中插入图片、视频;
⑩任意剖面提取;


同时精细分类的过程也需要进行大量人工干预,弥补自动分类算法在数据判别上不准确的不足,经过精细分类的激光点云数据进入最后的质检阶段。对数据进行遍历,使用不同的显示模式,检查分类成果,保证质量。
激光点云成果也可输出为XYZ、LAS、TXT等多种数据格式作为原始数据存储入库。
然后采用3ds Max软件来进行建模。首先根据项目确定需要精细建模的地区划分作业范围和作业设计,然后在3ds Max里建立模型,格式为max。
激光点云也可以根据需求导入不同平台,比如BIM平台,进行BIM建模。
本次试验扫描面积大、扫描工期短、扫描环境复杂,且扫描时正值商场、地下通道、地下停车场人员活动密集时段,扫描难度大。但由于作业前合理规划设计扫描路径,充分发挥了iMS3D扫描设备的技术优势和良好性能,本次扫描试验成功完成,获取点云数据近 30 G,扫描面积超过3万km2。点云数据质量良好,解算速度快,且点云色彩丰富,比较适合用于后续三维建模。
如图1~图3分别摘取部分扫描区域三维点云数据、基于点云数据测绘的二维平面图和基于点云数据生成的三维模型(白模)。
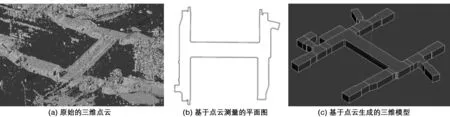
图1 地下通道扫描测量结果

图2 地下商场扫描测量结果

图3 地下车库扫描测量结果
5 精度评估与效率分析
5.1 综合比较与效率分析
目前市面上常用的三维扫描仪有两大类:
(1)一类是静态扫描仪
有FARO、Z+F、PENTAX、Trimble等品牌,这些设备在地下空间扫描时需要事先进行导线布设,然后在布设的已知点上进行一站一站的扫描,处理数据时需要拼接点云,效率特别低,不适合在复杂地下空间中扫描应用。
(2)另一类是三维移动扫描设备
市面上的产品品牌有iMS3D、TIMMS等。
经过调研比较,一方面,TIMMS设备成本非常高;另一方面,TIMMS设备在使用的过程中需要在已知点上严格对中整平,需要进行较长时间的初始化工作,工作效率非常低。
而iMS3D无须初始化,开机后即可由操作员推着进行扫描即可。最关键的是iMS3D得到的点云是一套完整的点云,不需要进行拼接,这样也就避免了因点云拼接造成的精度损失。
所以我们最终选择了iMS3D扫描设备。
5.2 技术特点与优势
(1)主要技术特点
核心技术领先,测量精度高。
iMS3D测量扫描仪对室内和地下2D/3D环境的扫描是基于其独一无二的SLAM技术,无须GPS、GNSS和INS(惯性导航系统),也无须测站就可以实现厘米级精度的测量。
技术特点:
①利用激光雷达和SLAM(同步定位与制图)算法,达到高精度的三维定位;
②专为室内应用;
③高密度紧凑的激光雷达传感器,扫描范围可达 30 m;
④可得到空间位置、时间标记、点云与影像数据;
⑤360°球型图像捕捉相机;
⑥完全移动式,并且移动和扫描等操作都很简单;
⑦低于1 cm分辨率的精度;
⑧紧凑的可拆卸系统,易于运输。
(2)主要技术优势和特征
具有扫描效率高,数据精度高的特点,设备操作简单,支持连续扫描,无须测站即可达到厘米级精度,特别适用于城市地下空间三维数据的采集工作。相比传统的静态数据获取方式更节省时间和作业成本,更符合大体量室内数据精确采集的实际需求。
6 结 语
采用三维移动激光扫描的方式则可有效解决复杂地下空间、异形结构、碎部结构测量的问题。三维激光点云扫描后获取的结构信息丰富,所见即所得,能将视线范围内的所有构筑物全部扫描记录下来。而对于一些存在遮挡的构筑物,可直接将三维扫描设备绕开障碍物,直接到需要测量的构筑物周边进行三维扫描,获取全貌数据。
同时,采用三维移动激光扫描获取的地下空间数据是连续点云,把地下空间不同结构、不同房间、不同方位的所有三维点云数据均解算在一个完整的空间范围内,对数据质量检查、完整性检查、逻辑结构检查等而言,都十分直观、清晰。
并且,此次测试扫描的三维激光点云数据与设备自带的全景相机采集的影像数据进行自动匹配,生成彩色点云。基于彩色点云所扫描的构筑物、地下空间等信息,与实际地下空间中的构筑物色彩、纹理一样,对于后续三维建模、构筑物结构属性识别等均有直观的参考。尤其对一些细部纹理、异形结构的测量,彩色点云将能极大减少后续建模的工作量,提高工作效率。
[1] 黎树禧,喻永平. 广州市城市地下空间测量技术研究[J]. 测绘通报,2011(9):45~47.
[2] 王红新. 广州市城市地下空间设施普查及测绘技术应用与实践[J]. 工程勘察,2014(5):63~67.
[3] 李永强,郭增长,刘会云,等. 地下空间移动激光测量系统研发[J]. 煤矿开采,2016,21(2):83~86.
[4] 李大军,王明洋. 城市地下空间管理实景化[J]. 地理空间信息,2009,7(3):121~123.
Study on Underground Space Measurement Method Based on 3DSLAM Mobile Scanning Technology
Wang Menghe1,Chu Zhengwei1,Zheng Yong2,Zhao Bin2
(1.Nanjing Institute of Surveying,Mapping& Geotechnical Investigation Co. Ltd.,Nanjing 210019,China; 2.Beijing WintechTechnology Co.,Ltd.,Beijing100029,China)
Aiming at the difficulties and problems of city underground space of the traditional measurement methods,a test based on 3D SLAM(Simultaneous Localization And Mapping) a new method of underground space measuring mobile scanning technology.Using iMS3D three-dimensional scannerin Xinjiekou District of Nanjing city underground space of scanning,respectively on different types of underground space such as the underground parking lot,underground tunnels,underground shopping malls for the rapid and efficient three dimensional laser point cloud data acquisition and digital measurable image acquisition,through postprocessing software and realizes the measurement of different underground space structure,the results meet the requirements of the relevant regulations,but also the realization of the underground space in the main building (structure) 3D modeling and digitalmeasurable image management structures. The test results show that:Based on the technology not only can be fast and efficient data collection and measurement quickly and effectively to the underground space,can also be synchronized to build 3D model and digitalmeasurable image,provides a new technical means for city underground space measurement.
underground space measurement;three-dimensional laser point cloud data;3D SLAM mobile scanning technology;digitalmeasurableimage
1672-8262(2017)03-119-05
P234.4
A
2017—02—28
王孟和(1966—),男,高级工程师,硕士,主要从事测绘信息化技术研究及地理信息系统应用工程项目建设。
