基于Robotmaster的工业机器人虚拟仿真实验平台设计
2017-07-07
(1.辽宁装备制造职业技术学院 自控学院,辽宁 沈阳 110161;2.沈阳工业大学机械工程学院,辽宁 沈阳 110870)
1 引言
工业机器人作为机电一体化的典型设备,广泛应用于现代工业自动化的各个领域,尤其适用于焊接、搬运、机加和喷涂等重复性劳动强度高、工作环境差的场合[1-2]。从2014年以来,中国已成为工业机器人需求增长最快的国家之一。预计至2017年,我国机器人整体市场需求量约11.5万台,同比增长25%[3-4]。随着中国工业机器人市场的强势发展,高素质高技能专门人才的短缺已经成为产业发展的瓶颈。
目前,辽宁装备制造职业技术学院正致力打造工业机器人人才培养体系,有目的地为企业输送服务于生产第一线岗位的工业机器人应用型人才。为了与企业实现零距离对接,学院开发了相应的实训课程,这就需要有配套的实训环境作保障。而建立一个优质的工业机器人实训室不仅需要购置机器人本体,还需要配备必要的外围设备,如气动装置、检测系统、送料机构等,这使得实验室的投入成本大大增加。同时,还要考虑到实验过程中的物料设备损耗以及人身安全等因素。从教学反馈来看,虽然真实的机器人设备能够给学生提供直观、切身的体验,但是实际情况往往受到设备数量的限制只能让学生分组分批次的进行实验,况且也只能让学生观看实验结果,而未能真正给学生独立编程、调试的机会。因此,建立智能化的虚拟工业机器人仿真实验平台是解决以上问题的最佳途径。
2 虚拟实验平台的构建
2.1 Robotmaster虚拟仿真软件简介
Robotmaster是一款优秀的离线编程软件,支持市场上的绝大多数机器人品牌,如KUKA、ABB、FANAC等[5]。该软件具有强大的动态交互能力,用户可以以手动或自动的方式轻松修改机器人的位姿和轨迹。在企业项目规划阶段,可借助Robotmaster软件在实际机器人运行之前先进行位姿模拟和试运行,不仅可以提高企业生产效率还能降低调试成本。此外,Robotmaster软件集成了更强大、更直观的工作空间分析功能,能帮助用户迅速确定工件的最佳位置,并能结合动态重算功能清晰地显示环境变化对所有操作的全部影响。这就避免了工业机器人在运行中可能的误操作造成的伤害和损失。在调试阶段,Robotmaster可以在PC机上完成用户控制和干预过程,得到各种相关数据。同时,该仿真平台能定制工业机器人工作工程的示教画面,增强视觉真实感。
Robotmaster还配有强大的控制工具,可以应用于任何的过程设置,如工具转动、倾斜、回转等位置,可以做到几个参数的同时优化,并实时显示机器人各关节位姿参数[6]。
2.2 工业机器人虚拟实验平台的总体框架
工业机器人虚拟实验平台的设计采用分级设计思路,先根据系统要实现的功能划分出第一级菜单,然后再对各个子菜单进行设计,正确划分和归类各级菜单是保证系统有效运行的前提。图1为工业机器人虚拟实验平台的总体框架。
首先,用户先进入登录界面,输入自己的用户名和密码,进入虚拟实验平台后可以直接选择需要完成的实验,也可以选择相关示教过程或下载相关资料来学习,或是查看以往的实验成绩。实验做完后可以点击保存,提交实验报告,并可以在师生互动区与教师和同学进行交流并分享经验,也可以展示自己的实验成果,形成学生之间的互评和教师点评,或对系统反馈一些问题,这些问题会提交到服务终端,由管理员统一处理。

图1 工业机器人虚拟实验平台的总体框架
3 虚拟仿真实验内容
根据工业机器人在工业自动化领域的应用调研,可将实验内容划分为4个模块,即搬运、焊接、加工、喷涂。利用Robotmaster的仿真动画可观看机器人在不同工作站的独立操作,或单个工作站在连续模式或步进模式下的机器人运动。由此可实现对不同工作状况和不同工作场景下的虚拟仿真。这样的好处是一方面学生可以通过观看仿真过程深入了解和掌握工业机器人的安装、调试及维护保养等专业技能。另一方面,学生通过自己动手完成工业机器人的典型仿真实验,可以轻松获取操作机器人的方法,并及时总结经验。
3.1 焊接机器人实验设计
焊接机器人在汽车制造工业中有着广泛的应用,在工业机器人发展初期,几乎一半左右的工业机器人为焊接机器人[7]。Robotmaster软件有专门的焊接指令库,可以模拟整个焊接过程。实验前,教师可以介绍焊接机器人的各个工作站,并在教师机上构造机器人系统,利用编程和操作完成工艺要求,让学生能够清晰认识机器人的关节运动、轨迹规划、碰撞检测等环节。在自主实验中,学生可以自行设计运行轨迹,并通过编程模拟来验证方案是否可行,进而选取和优化焊接轨迹。图2为Robotmaster中的焊接机器人虚拟系统。
3.2 搬运机器人实验设计
搬运机器人为应用机器人运动轨迹实现代替人工搬运的自动化产品。搬运机器人的优点是可以通过编程完成各种预期的任务,尤其体现出了人工智能和适应性。搬运机器人要执行的任务是将工件从一个加工位置移到另一个加工位置,从而取代人完成复杂繁重的体力劳动[8]。通过安装不同的末端执行器就可以实现不同形状工件的搬运作业。搬运机器人广泛应用于自动化生产线、仓储搬运、装配流水线、机床自动上下料等场合。在虚拟实验设计中要把握几个关键点,如原点位置、待抓取点、抓取点、待放置点、放置点等,据此建立程序框架、编写程序、调试运行。到位准确、运行平稳是评价搬运机器人的重要指标。图3为搬运机器人在生产线上搬运大型玻璃虚拟系统。

图2 焊接机器人虚拟系统

图3 搬运机器人虚拟系统
3.3 加工机器人实验设计
实验项目以激光加工机器人为例,使用FANUC机器人实现高精度的激光加工作业,如图4所示。该系统通过对加工工件的自动检测,产生加工件的模型,继而生成加工曲线,也可以利用CAD数据直接加工。可用于工件的表面处理、打孔、修复等。建立工作站的步骤为激活机器人类型→设定机器人参数→设定坐标系参数→设定起始点和结束点参数→设定轴配置参数→保存参数→开始仿真。在仿真窗口中可以处理并验证刀具路径,然后生成相应的机器人代码。这样,机器人就会按照制定程序完成加工要求,并能保证加工精度。

图4 FANUC加工机器人虚拟系统
3.4 喷涂机器人实验设计
喷涂机器人是可进行自动喷漆或喷涂其它涂料的工业机器人,广泛应用于汽车、仪表、电器、搪瓷等工艺生产部门[9],如图5所示。以FANUC P-250iA115机器人为例,在工业应用中可达最大的工作范围:1400arms;最快的关节速度:1500mm/s,荣幸的密封中空手腕[10]。仿真前要先进行参数设置,包括流量、物化气压、喷幅气压以及静电量等,所有设置都是通过模拟量信号输出,这些参数都可以直接在机器人程序中直接调用。机器人动作时,可以通过视角盘直接控制喷枪,选择换色时序,也可以配合换色时序添加机器人动作,提高生产节拍。

图5 喷涂机器人虚拟系统
4 虚拟仿真平台的实验过程
传统的机器人技术教学实验都是以已经搭建好的装置为研究对象,各类传感器、驱动器、控制柜都已连接完毕,学生只能在实验中观看动作流程,无法实现提高学生专业技能的目标。采用虚拟仿真技术可以让学生自主规划机器人的运动轨迹,模拟真实的生产场景。这样不仅可以提高学生在机械、电气方面的设计能力,还能开发学生的创新能力。图6为建立一个工业机器人实验项目的主要过程。
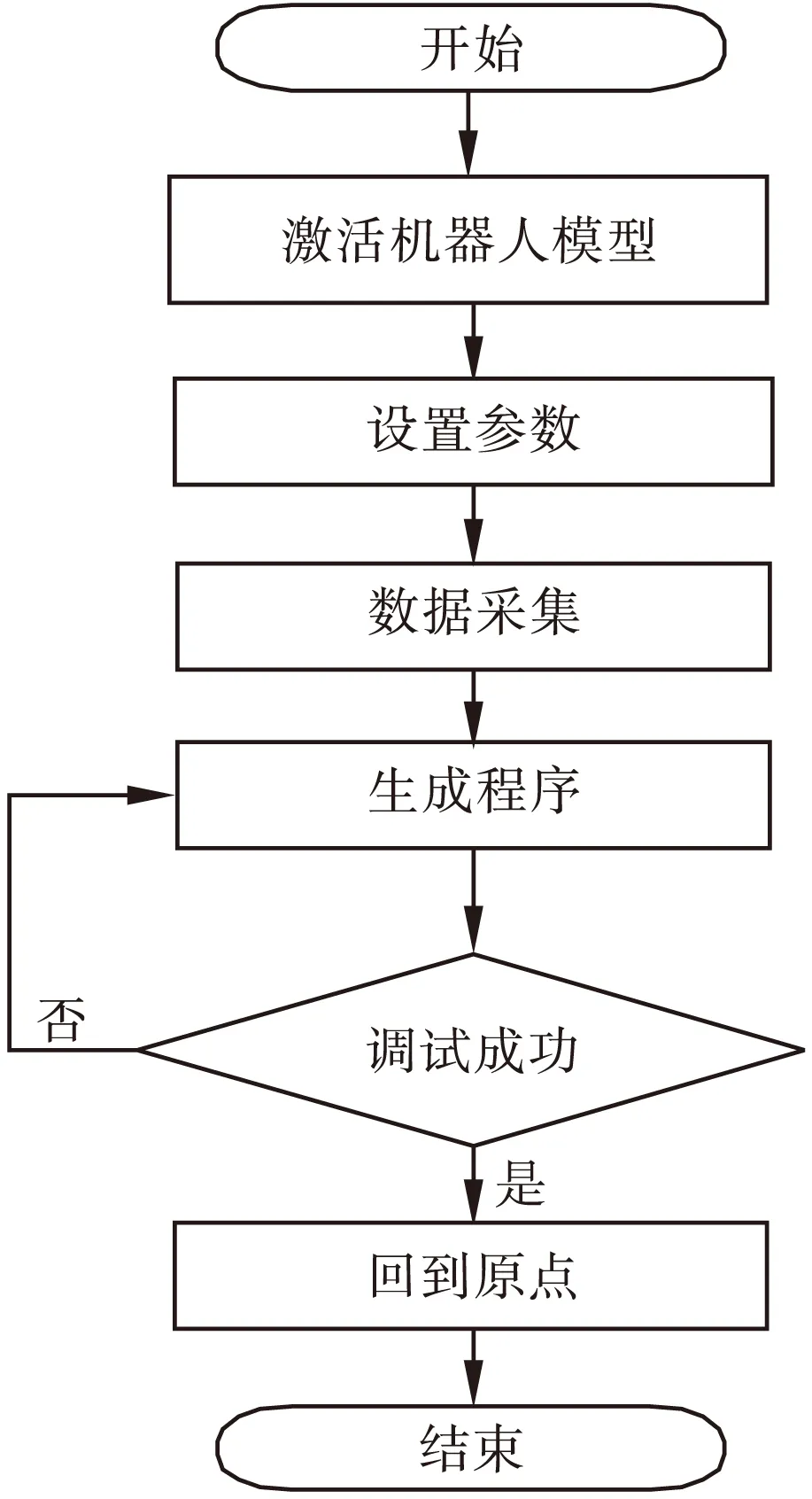
图6 工业机器人仿真实验流程图
5 虚拟仿真实验平台的优势
Robotmaster工业机器人虚拟仿真实验平台的构建是对传统教学手段的改进和补充,具有以下几点优势:
(1)优化教学资源,深化教学改革。
设计综合性的工业机器人虚拟实验平台,使得教学资源得到了质的延伸。传统的工业机器人实验课程往往针对特定的工况来设计教学内容,由于单一的工业机器人系统受其特定工况的限制,如焊接机器人配置了焊枪及转台,因此这套设备就只能做焊接实验,要想改变其功能必须配置相应的外围设备,成本高、灵活性差;而采用虚拟工业机器人实验平台可以根据需要来选择机器人的功能,使其适应于不同的工况和工作场景,这不仅丰富了教学内容,而且进一步深化了教学改革。
(2)转变教学模式,改善教学效果。
采用Robotmaster的工业机器人虚拟实验平台,有助于开展项目式教学,教学模式可以是“理实一体化”,也可以是“项目导入-任务驱动”。根据任务要求,搭建合适的工作场景,自主设计控制系统,选择检测装置,真正实现以学生为主体,教师为引导的一体化教学体系,使学生体验教学和真是工作岗位的零距离衔接。
(3)提高教学质量,培养创新人才。
利用Robotmaster中包含不同的工业机器人品牌及外围设备元件库,学生可以自行规划机器人的运动轨迹,然后生成相应的机器人程序,通过调试运行验证工艺的可行性,使得方案得到进一步优化。这样不仅能加深学生对工业机器人系统工作原理的理解,还能培养学生的创新能力,实现高质量的人才培养目标。
6 结束语
虚拟工业机器人仿真平台和实际工业机器人应用相结合的教学方法已进入试运行阶段,以工业机器人专业1班为试点班,2班为对比班,经过一轮的授课,试点班师生教学反馈良好,该方法提高了学生的学习兴趣,增强了自主学习能力。与对比班比较后发现,试点班的整体学习成绩得到了大幅度提高,教学效果得到进一步改善。此外,虚实结合的课堂训练,既满足了教学需求又降低了投入成本,为高职学校“教-学-做”一体化的教学模式注入了新的元素。此辐射效果是双赢的,对学生而言,可以体验真实的岗位环境;对教师而言,可以感受全新的教学模式。因此,建设虚拟工业机器人仿真实验平台必将成为实现应用型人才培养目标的发展趋势,具有较好的推广价值。
[1] 王田苗,陶永.我国工业机器人技术现状与产业化发展战略[J].机械工程学报,2014,50(9):1-9.
[2] 骆敏舟,方健,赵江海.工业机器人的技术发展及其应用[J].机械制造与自动化,2015,(2):1-4.
[3] 柳倩,桂建军,杨小薇,等.工业机器人传感控制技术研究现状及发展态势[J].机器人,2016,38(5):612-620.
[4] 计时鸣,黄希欢.工业机器人技术的发展与应用综述[J].机电工程,2015,32(1):2-12.
[5] 陈树君,赵呁,肖珺,等.铝合金电弧熔积成型机器人增材制造系统[J].焊接,2016,(4):9-12.
[6] 张健.工业机器人轨迹规划与仿真实验研究[M].浙江:浙江工业大学,2014.
[7] 鲁鹏,张有博,谷明信,等.基于Robotstudio的工业机器人虚拟仿真实验室的构建[J].机电技术,2015,(8):152-155.
[8] 王殿君,关似玉,陈亚,等.六自由度搬运机器人动力学分析及仿真[J].机械设计与制造,2017(1):83-84.
[9] 袁安富,沈思思,余莉,等.基于ADAMS和MATLAB的喷涂机器人运动仿真研究[J].组合机床与自动化加工技术,2014,(8):380-382.
[10] 刘海生,王中任,吴政江,等.FANUC机器人机床上下料系统设计与仿真[J].机床与液压,2016(5):56-58.
