面向深空探测的星球钻取采样技术综述
2017-07-07唐钧跃邓宗全陈崇斌王印超全齐全姜生元唐德威
唐钧跃,邓宗全,陈崇斌,王印超,全齐全,姜生元,唐德威
(哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨150001)
面向深空探测的星球钻取采样技术综述
唐钧跃,邓宗全,陈崇斌,王印超,全齐全,姜生元,唐德威
(哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨150001)
回顾国内外星球钻取采样技术发展现状的基础上,详细论述了星壤的物理力学特性及模拟星壤制备工艺,着重分析了钻进取心特性实验及理论研究成果,深入剖析了包含钻进状态参数辨识及自主钻进控制在内的星球自适应钻进规程关键技术问题。在此基础上,以我国探月三期工程无人钻取采样任务为研究背景,提出了对星球钻取采样技术的展望与建议。
深空探测;星球钻取采样;星壤;钻进取心特性;自适应钻进
0 引 言
对未知世界的探索,是人类发展的永恒动力;对茫茫宇宙的认知,是人类进步的不懈追求[1-2]。从1957年第一颗人造地球卫星Sputnik发射成功,到1969年人类首次踏足月球并收集月壤样品,再到2014年Rosetta号着陆于67P号彗星表面开展原位土体探测,人类的深空探索已基本覆盖太阳系内绝大数的行星、卫星及小行星等天体。针对未来星球探测任务,当前亟需一种稳定可靠地到达指定目标深度并有效采集土体样本的实现方式。相较于其他土体破坏方法,钻取采样借助采样钻具的回转和进尺耦合运动可相对高效、便捷、稳定地去除表层土体,在获取沿深度方向星壤样品的同时,可显著减少对周围原位星壤的破坏,因此该方法当前已被广泛地应用于各国地外天体探测任务[3]。
地外天体受极端温度、稀薄大气等环境因素影响,导致其表面分布着一层厚约数米至数十米含有不同组分的星壤颗粒[4-6]。由于不同星壤组分的物理-力学特性存在较大差异,钻进过程中采样装置所受力载极有可能发生剧烈波动,严重影响钻进稳定性和取样质量。受探测雷达精度制约,目前星球钻取采样仍无法提前获取采样点处准确地质层理信息[7-8]。为保证采样任务的顺利实施,钻进过程中钻进力载须实时监测并控制在合理范围内。当前星球钻取采样控制方法主要包含:地面远距离遥控和星球表面自主控制。鉴于地球与目标星球间通讯不可避免地存在传输延时,长时间的信号迟滞势必影响钻取任务的可靠实施[9-10]。因此在任务执行中将以星球表面的自适应钻进为主要控制方法,以地面遥控方式为辅助控制方法。
自2004年正式开展探月工程以来,我国已先后完成了对月球的“绕”、“落”探测任务,收集了大量有关月表地形地貌的原始数据[11]。目前正在实施的探月三期工程无人自主采样任务将利用钻取采样的方式获取深度约为两米的连续月壤样品并返回地球。本文面向未来深空探测的星球钻取采样任务,在回顾当前星球钻取采样技术发展现状基础上,紧密结合我国的探月工程背景,重点探讨星球钻取采样中的关键问题:钻进取心特性及自适应钻进规程,并结合我国的技术发展现状和技术基础,提出了发展星球钻取采样研究的展望和建议。
1 星球钻取采样技术发展概述
上天、入地、下海自古以来一直是人类探索自然的三大壮举[12]。星球钻取采样占据三大壮举中的前两项,在实现过程中极具挑战性。依据岩土钻掘学定义,星球钻取采样属于科学钻探的分支。科学钻探旨在通过勘测星球土壤,获悉星球内部地质结构,研究星球形成和生命演化等重大科学问题。
1.1 地面传统钻探技术概述
人类钻探起源于我国劳动人民钻凿盐井[13]。目前,常用的地面钻探方法主要有:金刚石回转钻进、三牙轮钻进和气动潜孔锤钻进。不同于金刚石钻进,牙轮钻进为不取心的全面钻进。常用的取心方法有常规提钻取心、绳索取心和水力/空气反循环取样,生产中应用绳索取心和反循环取样较多[14]。绳索取心是一种不提钻的钻探技术。当样心充满取心管时,借助绳索打捞工具在钻杆内可将样心管捞取上来。此方法可有效减少钻杆升降次数和动力消耗。反循环取样分为空气反循环和水力反循环[15],具有钻探效率高、成本低的优点,但由于采用全面钻进的方式,所以不能真实反映所钻地质结构。
近年来,钻探作业中的自动化技术伴随随钻测井技术的推进得到了稳步发展。辅助以随钻测量技术,新一代的自动化钻探技术可利用随钻测量数据实时调整并控制钻井参数(钻压、扭矩、转速和泵压等)。斯伦贝谢公司研制的旋转导向系统为自动化钻探系统的代表。该系统能够依据实时随钻测量和随钻测井的反馈数据对井下系统控制装置的高级命令做出快速反应,通过改变冲洗液的流速调整钻进状态[16]。目前,大量钻机上已配有本地遥控作业功能,可在控制室内进行常规作业,但是长距离尤其是跨区域的遥控钻探仍处于起步阶段。2004年11月位于英国斯伦贝谢剑桥研究中心的科学家借助卫星通讯技术发送遥控命令使得位于美国的斯伦贝谢试验中心的钻机成功改变了泵排量,实现了人类首次跨洋远程遥控钻井作业[17]。但是鉴于远程遥控对远程端操作人员的专业性要求较高,且出现紧急情况时仍需借助现场司钻对工况进行酌情判断,因此该项技术目前仍处于摸索阶段。
1.2 星球钻取采样技术概述
从20世纪50年代至今,多个国家针对地外天体开展了深入广泛的钻取采样探索。其中,前苏联的Luna系列、美国的Apollo载人登月计划和火星探测计划以及欧空局的ExoMars火星探测计划和Rosetta彗星探测计划尤为瞩目[18]。鉴于各国的星球钻探任务目的不同,钻取采样器的钻进方式、取样方式及控制策略均存在较大差异。
1.2.1 前苏联Luna系列钻取采样器
迄今为止,前苏联Luna系列是唯一成功实施月面无人钻取采样并返回的探测器[19]。Luna-16探测器采用外伸式机械臂搭载采样器的方式钻取月壤。螺旋钻杆内装有用于取样的取心管。当采样钻具钻至指定深度后,样品连同钻具一起转移至返回器上方的收集容器中并随之返回地球[20]。随后发射的Luna-20探测器采样方式与Luna-16类似。钻进中,钻机在10cm后遭遇较大阻力并导致三次电机过热故障,最终被迫在25cm处停止钻进,共收集55g月壤[21]。前苏联最后一次月面采样任务Luna-24采用了改进的滑轨式深层钻取采样方式,更大程度地利用了着陆器自重显著提升了钻压力[22]。改进后的钻机具备回转和冲击功能,适应于更为坚硬的地质层。螺旋钻杆内安置有一套复杂的取样机构,借助内翻软袋可有效包覆月壤样品并保持其层理信息。当钻进至指定深度时,通过样品传送机构可完成月壤样品的缠绕和封装。不同于前两次任务,Luna-24探测器采用阈值判断的自主控制方法,借助弹簧机构判断钻进压力是否超出设定的进尺力阈值,及时启动冲击电机以克服钻进阻力[23]。由Luna-24遥测结果可知,钻进过程中冲击电机被频繁地开启,并曾两次出现钻压力过大报警,最终钻进深度达2250mm,返回月壤总长约1600mm,样品质量171g[24]。
1.2.2 美国Apollo登月计划人工采样器
美国地外天体钻取采样起始于20世纪60年代的阿波罗载人登月计划[25]。与前苏联的无人自动钻取采样方式不同,美国在开展月面钻取采样时采用人工钻取采样的方法获取月壤样品。Apollo11、12和14任务中,宇航员手持压入式取心管获取月壤样品,最大压入深度仅为70cm[26]。在后续的Apollo任务中,宇航员使用手扶式回转冲击式钻具ALSD(Apollo lunar surface drill)开展月面采样。此钻具由一组456W(24 VDC/19 A)的电池驱动,最高回转转速280r/min,最大冲击频率37.8Hz,最大冲击功4.4J/blow[27]。执行任务过程中,宇航员根据现场环境自行选择采样点并实时调整钻压力和进尺速率。Apollo15、16及17三次任务均成功实现了2.4m的钻进目标,共取回4123g月壤样品[28]。尽管采用人工钻取采样可更为灵活地选择采样点且实时调整钻进工艺参数,但是在上提钻具和回收月壤过程中却易出现问题,例如:在Apollo15任务中宇航员为上提堵塞的钻杆导致肩膀扭伤[29]。
1.2.3 美国Curiosity火星探测任务采样器
2012年成功登陆火星的好奇号火星车上搭载了一套臂载回转冲击式钻取采样器,以实现火星表面多点沙土和岩石样品的就位检测[30]。该采样器取样深度仅为5cm,属于浅层钻取采样器。钻进中,钻压力由机械臂压缩钻具与钻机之间的储能弹簧提供,并由机械臂对钻进深度进行实时补偿[31-32]。采样器采用直径6mm的全面钻头。钻进过程中样品经由钻头与取心管之间环隙进入收集腔供分析仪器开展原位测试。此采样器采用了和Luna-24采样器类似的阈值判断自主钻进控制方法[33]。钻进过程中,驱动电机电流超过预设定的阈值时将自动停止钻进,等待地面操作人员诊断完遥测数据,发送故障恢复的遥控指令后才能继续钻进。
1.2.4 欧空局ExoMars火星车采样器
欧空局预计于2018年发射的ExoMars火星探测计划将借助巡视器开展火星表面的样品探测和采集任务[34]。该采样系统主要包括钻取单元和位姿调整单元。钻取单元由取心钻具和内部光谱探测仪组成。采样系统的位姿调整单元实现钻具的两自由度运动[35]。探测器采用多杆组接的方式钻进取心。置于机械臂末端的钻机内装有五根钻杆,最大钻进深度2m。借助内部杆件堵塞取心钻头孔将其变为全面钻头;到达预期采样深度时,取心钻头前端塞杆抽离,钻头切换为普通取心钻头[36]。
1.2.5 欧空局Rosetta彗星探测任务SD2采样器
针对彗星探测,欧空局于2004年开展了罗塞塔(Rosetta)探测计划。经历10年约5亿公里的太空飞行后,Rosetta探测器于2014年11月成功登陆丘留莫夫-格拉西缅科彗星开展探测任务[37]。Rosetta探测器搭载了一套钻取采样装置(SD2)。SD2采样器采用回转钻进的工作方式,最大钻进深度20cm。该钻具设计回转转速100~150r/min,钻进功耗4~8W。钻进至目标深度后,采样钻具将提升1mm以释放取心管,继续回转钻进20s后收回取心管,实现样品探测和收集任务。当钻进坚硬岩石时,采样钻具的最大钻压力分别可达60N和220N,进尺速度约为1mm/min和2mm/min[38]。
1.2.6 美国USDC冲击式超声波钻探器
针对未来小行星钻取采样中钻压力及钻进功耗较低的特点,美国航空航天局(NASA)基于压电驱动原理联合研发了超声波冲击式钻探器(USDC)。此钻探器通过由高频振动转换成的低频冲击作用实现钻机的向下钻进,主要包含:压电换能器、自由质量块和钻具[39]。采样中,压电换能器末端的超声波振动经自由质量块转化为钻具的高频机械振动,从而纵向冲击并破碎岩石。与传统钻探器不同,USDC只需较小的钻压力就可钻进较高硬度的岩石,克服了传统钻探器难以在低重力环境下工作的难题[40-41]。目前,美国计划将USDC安装于微型着陆器上或小型巡视机器臂上开展就位探测。
1.2.7 星球钻取采样器技术分析
星球钻取采样器均针对各自探测任务开发研制,在钻探方式、取样方法及控制策略等方面存在较大的技术差异,因此针对未来深空探测需对比各自技术特点,吸收各自成功经验,规避潜在风险。
(1)钻探方式:除美国Apollo计划采用人工采样外,其余所有星球采样任务均采用无人采样器开展探测任务。其中,Curiosity采样器及SD2探测器均为浅层钻进;Luna系列则为较深层钻探,多采用回转冲击方式;ExoMars采样器则主要针对深层钻探任务设计,因而采用多杆组接的方式开展任务。
(2)取样方法:考虑到星球采样多在真空环境下开展,无法实现气/液反循环取样,因而历次星球钻取采样任务均采用取心管采样、绳索取样或提钻取样的方法。在层理保持性方面取心管采样及绳索取样具有较大优势,例如Luna系列探测器采用软袋取心的方式能够获取较为连续的月壤样品。
(3)控制策略:针对浅层钻进,由于钻进工况较为简单,基于阈值判断的在线控制方法大多可以胜任;针对较深层钻探任务,采用上述控制策略则存在较大的技术风险,例如Luna系列中曾多次发生钻机过热或钻压力过大的工况,利用阈值判断的控制策略在钻进工况或钻进对象的力载适应性方面仍存在较大不足,导致最终的取样效果不甚理想。
2 星壤/模拟星壤研究现状
2.1 星壤物理-力学特性
考虑到火星及小行星探测较月球探测执行时间较短,目前关于火星及小行星土体的资料还鲜有发现,因此本文主要针对月球土壤(以下简称为“月壤”)的物理-力学特性进行相关文献调研。月壤是指覆盖在月球基岩之上的所有月表风化层物质,即月球表面经过各种风化作用而形成的疏松堆积层[42]。其主要成分包括岩石碎屑、粉末、角砾和撞击熔融玻璃等。月海区次表层月壤厚度约为4~5m,月陆区由于暴露于月表的时间较长,受历次冲击成坑的溅射物的覆盖,导致月壤堆积较厚,通常可达10m。
如图1所示,由Luna探测器采集的月壤样品知,月壤粒径分布极为广泛,既有10mm以上的岩块也有0.1mm以下的松散颗粒。表征月壤力学特性的参数主要包括压缩性、抗剪强度、渗透性、承载能力、斜坡稳定性和通过性等[43-45]。月壤的力学特性由其物理特性决定,包括颗粒形状、粒径分布、颗粒比重、堆积密度、孔隙率、相对密度等。而上述物理特性是通过若干具体物理参数描述的,例如,描述颗粒形状的主要参数有:延性、长度直径比、圆度、体积系数、比表面积等。在所有物理特性中,月壤的天然密度和相对密度直接影响月壤的力学特性,进而影响钻进取心效果。
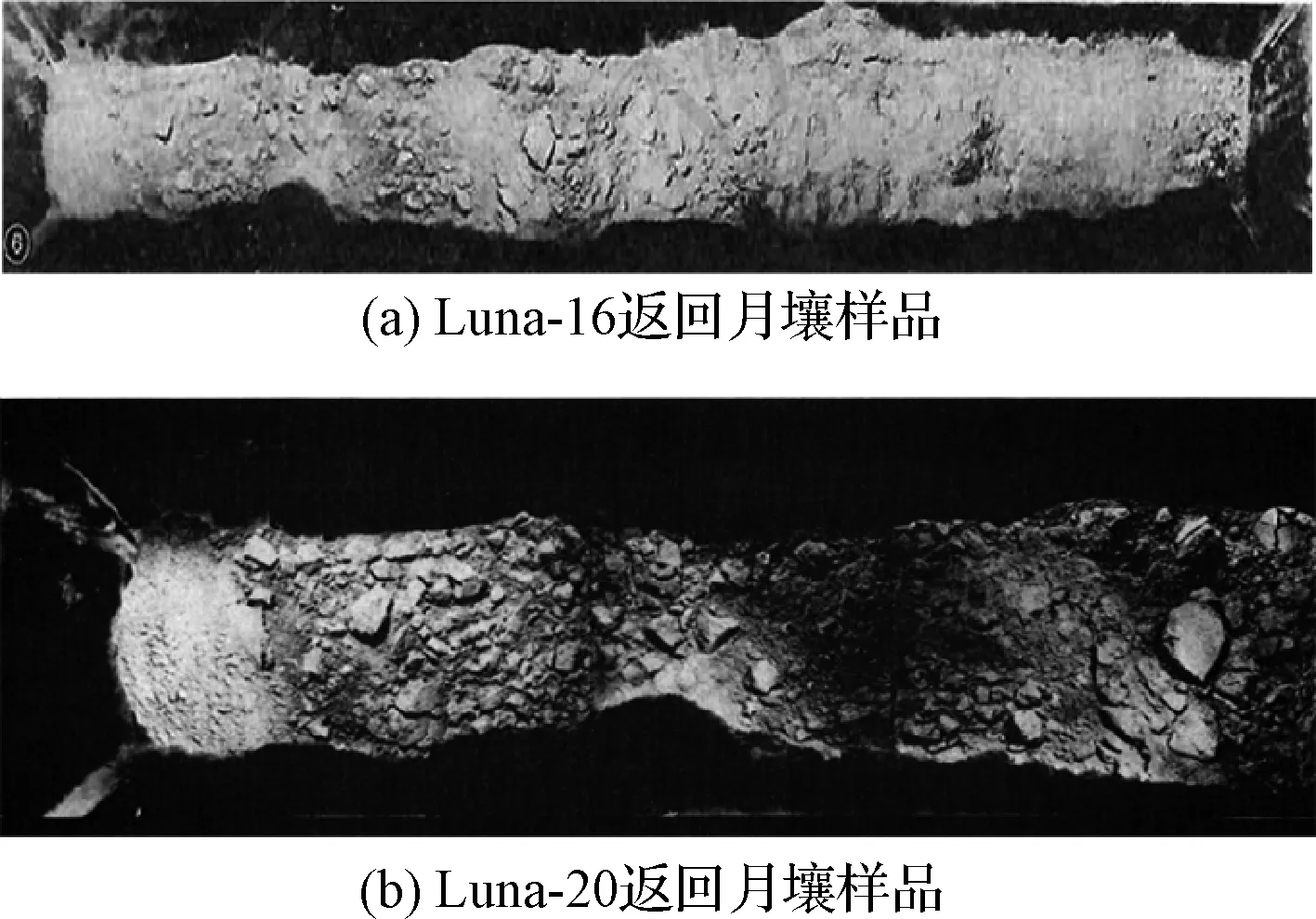
图1 前苏联Luna系列返回月壤样品Fig.1 Lunar soil sampled by Soviet Union’s Luna probes
除上述参数外,月壤的抗剪强度直接影响钻进力载和取心效果。对于实际月壤的抗剪强度,特别是大深度处月壤的原位抗剪强度,目前没有直接的测试数据,只能通过类比试验的方法获得。Mitchell等[31]根据玄武岩模拟月壤地面试验绘制了内摩擦角、内聚力与相对密度三者间的关系曲线。根据返回月壤样品估计的平均比重(Gs=3.1)及孔隙比(e=0.7~1.7)极限值,结合天然密度的估计值可获得实际月壤的抗剪强度在较大深度范围的分布情况。该分析方法通过天然密度将类比试验的抗剪强度结果和月壤深度联系起来。事实上,该估计结果较实际月壤的剪切试验得出的内聚力和摩擦角均偏大,这主要是由于:玄武岩模拟月壤与实际月壤在物质组成上不完全相同;月壤样品在返回地球和在地球环境的储存过程中真空度发生变化;实际月壤的抗剪参数测定过程引起颗粒状态变化。
2.2 模拟星壤制备工艺
无论是着陆器还是巡视器,一旦其接触星球表面就将与星壤发生相互作用。目前,随着深空探测任务的不断深入和拓展,前苏联和美国采集回来的月壤已远远不能满足地面实验研究的需求,因此亟需研制大量与真实月壤自然属性一致的模拟月壤。
在Apollo任务初期,美国NASA根据月球探测器Surveyor I和III获得的探测数据,在12种不同成分的模拟月壤中,选择了红色的火山渣和大理石作为原料,经破碎、研磨后混合成模拟月壤,用于着陆器的着陆冲击实验。1970年以后,美国相继研制了MLS和JSC系列等多种模拟月壤。MLS系列研制于Apollo后期,参考Apollo11号高钛含量的月陆月壤,主要成分为玄武岩。至1990年代,针对月海和月陆两种不同的地质特征,NASA研制了JSC系列模拟月壤,该系列也是目前应用最广的模拟月壤。JSC系列中的JSC-1型模拟月壤主要从模拟低钛含量的角度进行研制,基材是富含玻璃的玄武质火山灰,通过研磨、筛分制备而成,其化学组成、矿物成分、颗粒形状、颗粒粒径分布、比重、内摩擦角及粘聚力参数与Apollo14号采集的月海低钛月壤相似[46]。JSC-1A型模拟月壤以开挖、取样等实验为研究目标研制,因此在JSC-1型模拟月壤中添加了较大颗粒[47]。除上述两种模拟月壤外,美国针对未来重返月球计划,重新研制了标准模拟月壤NU-LHT[48]。如图2所示,NU-LHT采用与JSC系列类似的加工工艺,将矿石原料初加工破碎后加入氧化铝研磨剂研磨至适当粒径,再进行多种原料的混合搅拌。与JSC和MSL系列不同,NU-LHT型模拟月壤原料为低钛型矿石和高钙型矿石,与真实月壤成分更为接近。
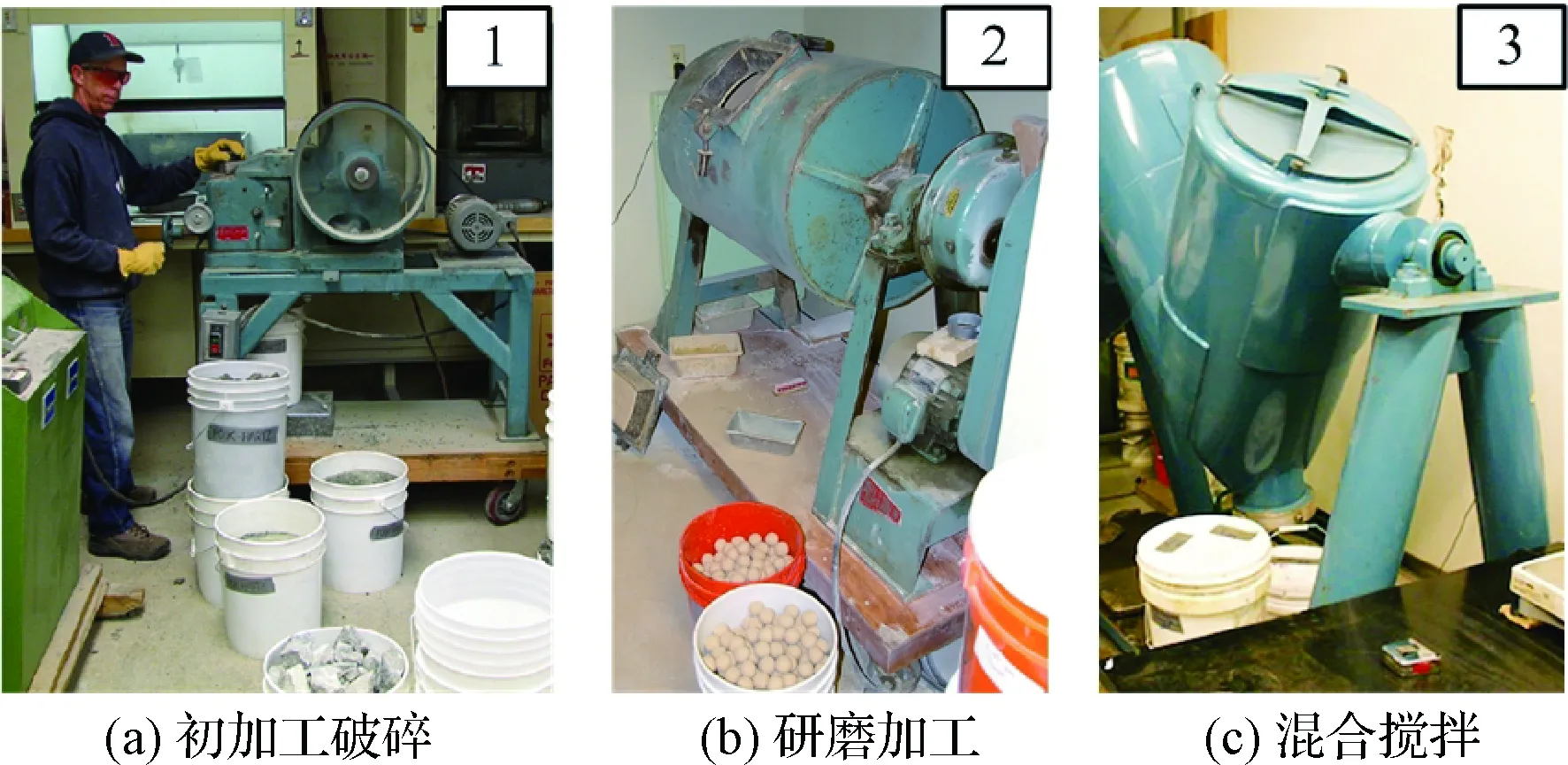
图2 美国NU-LHT标准模拟月壤制备流程Fig.2 Preparation processes of American NU-LHT standard lunar soil simulant
为满足月球采样任务实验需求,日本研制了MKS-1和FJS-1用以模拟Apollo14号采集的月海低钛型模拟月壤[49]。随着中国月球探测的不断深入,国内相关机构也研制了多种模拟月壤。例如:中国科学院与国家天文台合作研制了模拟月壤CAS-1和NAO-1,其中CAS-1与Apollo14样品的元素组成和物理力学性质接近[50]。中国地质大学以我国新生代火山岩为原料研制出了模拟月壤CUG-1A。该模拟月壤与实际月壤的化学性质、元素组成和物理力学性质比较接近。同济大学在CAS-1和NAO-1型模拟月壤基础上,将模拟月壤烘干、粉碎、筛分获得符合目标力学指标的模拟月壤TJ-1[51]。基于月壤平均性能参数,华南理工大学研制了一种典型基础模拟月壤样品,主要用于月球探测工程和月球基地的相关研究。上述模拟月壤制备方法都较好的选取了模拟月壤原材料并配以复杂的制备工艺,研制出了与真实月壤属性相近的模拟月壤,但是制备中大多忽略了沿深度方向上月壤的密度变化[52-53]。
针对未来小行星探测任务,目标星壤与月壤间势必存在一定程度上的物理属性差异,因此在未获得实际星壤前,可依据卫星获取的行星表面遥测数据推断此星球星壤的物质组成,选用合适的模拟星壤原料,并根据探测任务的特点选用相应的制备工艺,进而制备出物理力学属性相似的模拟星壤。
3 钻壤作用力学特性研究现状
受火箭运载能力限制,星球钻取采样大多采用小型化钻机,此类钻机所能提供的钻压力及钻进功耗都无法与地面钻探相比。在此工况下,星球钻取采样呈现出其独有的物理规律,即为钻进取心特性。目前,国内外学者主要借助于地面实验和理论建模的手段研究钻壤作用过程,以期获得影响钻进力载和取样效果的关键参数,优化钻机结构及工艺参数。
3.1 钻进取心特性实验研究
美国加州大学伯克利分校的Zacny[54]以火星钻探为背景,开展了火星环境下钻进取样研究。利用半自动的钻采系统和火星环境模拟试验箱开展了以砂岩、大理岩、含水土壤和冰为钻进对象,以孕镶金刚石钻头、PDC钻头和复合片钻头为钻具的室内模拟钻进实验。实验中通过真空泵保证试验箱内气压基本稳定于4torr(火星表面气压值),并利用加热装置加热模拟星壤样本至80℃,钻进过程中实时采集星壤样本的温升、钻具外表温升、钻具回转扭矩、钻压力等关键指标。试验发现:在含有水的星壤样本钻进时,样本中的水易发生升华,变成气体后有利于钻孔底部切屑的运移排屑,有效降低了钻进功率,同时极大改善了孔底的钻具应力状态,降低了钻头处磨损[55]。后续试验中,引入了气体冲洗装置,开展了不同气压条件下的排屑效率分析。
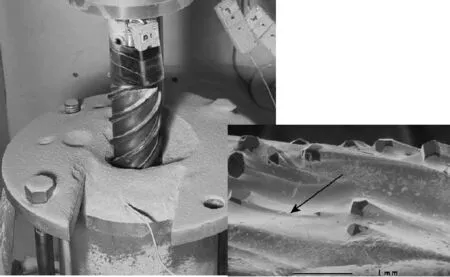
图3 模拟火星环境的钻进取心实验Fig.3 Drilling tests under simulated martian environment
英国萨里大学针对欧空局未来低重力环境下的星球钻探任务提出了一种仿生型的双向交错往复钻进方式[56]。如图4所示,此钻进方式参考木胡蜂产卵器的双瓣结构,通过控制双瓣钻杆的上下交错往复振动钻进土体。钻进中,当其中一瓣钻杆开始冲击振动时,另一瓣钻杆利用其特殊构型提供向下的额外钻压力,从而使得钻进过程中钻头前端可获得更多的钻压力[57]。考虑到星球低重力环境,双向交错往复钻进方式可一定程度上提高采样器的钻进效率。鉴于此钻进方式对原位土体的破坏较大,且为全面钻头钻进,样品的层理信息保持性较差。
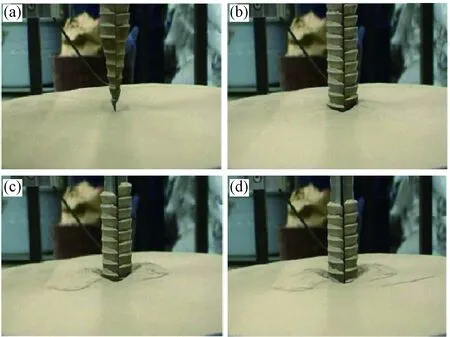
图4 双向交错往复钻进实验Fig.4 Dual-reciprocating drilling experiments
受日本航天局空间教育中心资助,日本综合研究大学院大学Nagaoka等[58]以月球探测为背景,系统分析了阿基米德螺旋机构在空间机器人领域的应用,提出了一种新型正反向双螺旋钻进方法。该钻机在圆锥型母体上设计了两段不同旋向的螺旋翼,其中前端螺旋翼主要完成原位土体的扰动,后端螺旋翼则将扰动后的土体向上运移,两段螺旋翼由两电机单独驱动。如图5所示,单螺旋与正反向双螺旋钻进对比实验表明:采用正反向螺旋并匹配合适的转速比可有效抵消钻具所受到的土体反作用力,提高钻进效率。考虑到此钻进属于全面钻进,且对硬件资源提出较高要求,目前仍在实验阶段。

图5 正反向双螺旋钻进实验Fig.5 Contra-rotor screw drilling experiments
哈尔滨工业大学宇航空间机构及控制研究中心结合我国探月三期工程要求提出了一种软袋式取心方法。采用内翻式的软袋包覆月壤样心,钻进过程中软袋处于固定位置,保持管随钻具一起向下钻进取心。由于钻进过程中软袋与样心间无相对滑动,该取心方法可保持样心的层理信息。研究者基于此取心原理研制了两米级的钻取采样测试平台,并利用此测试平台开展了不同钻头构型、不同钻杆构型及不同钻进工艺参数下的钻进取心实验,获取了实时钻进负载及最终的取样量[59]。
3.2 钻进取心特性理论研究
无论从矿物成分还是粒径级配等角度分析,星壤都属于传统“土壤”的范畴,因此开展钻进取心特性研究时可参考地面传统钻壤作用研究。目前,地面钻壤作用力学特性研究大多借助土力学相关理论,通常依据钻壤作用区域与作用机理不同,将钻壤整体力学作用分为钻头切削和钻杆排屑[60-61]。
3.2.1 钻头回转切削理论
与直线切削土体不同,回转切削过程中切削刃的轨迹为圆弧,导致实际切削角比刀角要小,且切削刃上方的土体自重也将对切削土体产生影响,此外回转切削外侧刃与孔壁始终接触,因此相应的侧向阻力也与直线切削不同[62-63]。目前,关于土体的回转切削理论研究较少,哈尔滨工业大学赵伟民与日本爱媛大学在此方面开展了相关合作,在McKyes[63]直线切削模型基础上,提出了土体的回转切削模型,并推导了回转切削土阻力矩与切削角及刃角间的关系[64]。该切削模型考虑了切削角与刃角间的差异和侧向土体的剪切破坏对切削力的影响。研究表明:1)刀具的切削角是回转切削阻力的主要影响因素,且阻力与切削角呈非线性关系,最小阻力切削角受土体的物理-力学参数的影响;2)土的物理力学特性参数中,土的剪切强度和内摩擦角是影响旋挖切削阻力的主要参数,且内摩擦角和剪切强度的越大切削阻力随之越大。
3.2.2 螺旋钻杆排屑理论
钻进过程中,螺旋钻杆主要用于运移钻头切削月壤产生的钻屑,其排屑原理类似于螺旋输送机[65-66]。加州大学伯克利分校的Zacny等[54]基于螺旋输送原理,分析了螺旋翼上的土体微元的受力情况,得到了螺旋钻杆的驱动力矩与钻杆的尺寸参数、回转转速及物料的物理力学参数间的关系模型,并对该理论模型进行了试验验证。哈尔滨工业大学的刘飞通过分析空心外螺旋钻杆与月壤间的相互作用特性,提出了螺旋钻杆排屑过程的“光杆模型”,并基于此模型建立了螺旋钻杆与月壤相互作用的等效力学模型[67]。在此等效模型中,将螺旋钻杆与土体间的相互作用力等效至螺旋钻杆螺旋翼的包络面上,并对螺旋槽内的钻屑微元进行了运动学和静力学分析,建立了螺旋钻杆的排粉阻力矩和辅助钻压力与土体物理-力学参数、钻杆构型尺寸参数和钻进规程参数的解析模型。
4 星球自适应钻进规程研究现状
星球钻取采样中,采样器排屑方式较为单一,所能利用的钻进工艺参数和钻进能量都极为有限,加之星地链路不可避免存在时滞,无法借助地面遥控实时调整钻进,因此为应对未来深空探测任务,亟需开展星球表面自适应的钻进规程研究,以期通过实时辨识当前钻进对象,并依据当前钻进对象的物理力学属性及时调整合适的钻进工艺参数(例如回转转速、进尺速率、冲击频率等)进行潜在故障的修复及降荷处理,进而达到有效控制钻进力载,提高钻进过程取心率,规避钻进故障的目的。
4.1 钻进状态参数及其辨识方法
实时获取钻进状态参数并正确识别当前钻进工况是实现自适应钻进规程的前提条件。为应对未来的火星深层钻探计划,美国NASA联合佐治亚理工学院提出了基于激光多普勒测振仪的钻进状态辨识方法[68]。如图6所示,钻进过程中两台激光测振仪被安置于钻具前端发送并接收干涉激光,将信号进行实时傅里叶变换获得钻杆在多方向上的自然频率和振动模态,并将其作为辨识参数输入至人工神经网络模型进行故障预测。在2006年南极科考实验中,该钻进状态辨识方法成功辨识出了5种钻进故障。在钻进含冰层时,由于液态水在低温环境中发生凝固导致辨识系统出现了故障误判[69-70]。鉴于该钻进状态监测方法借助于多台外部传感器获取钻杆的钻进特征,应用中对传感器的安装、集成等方面提出了较高要求,因此该方法目前仍处于地面实验阶段。
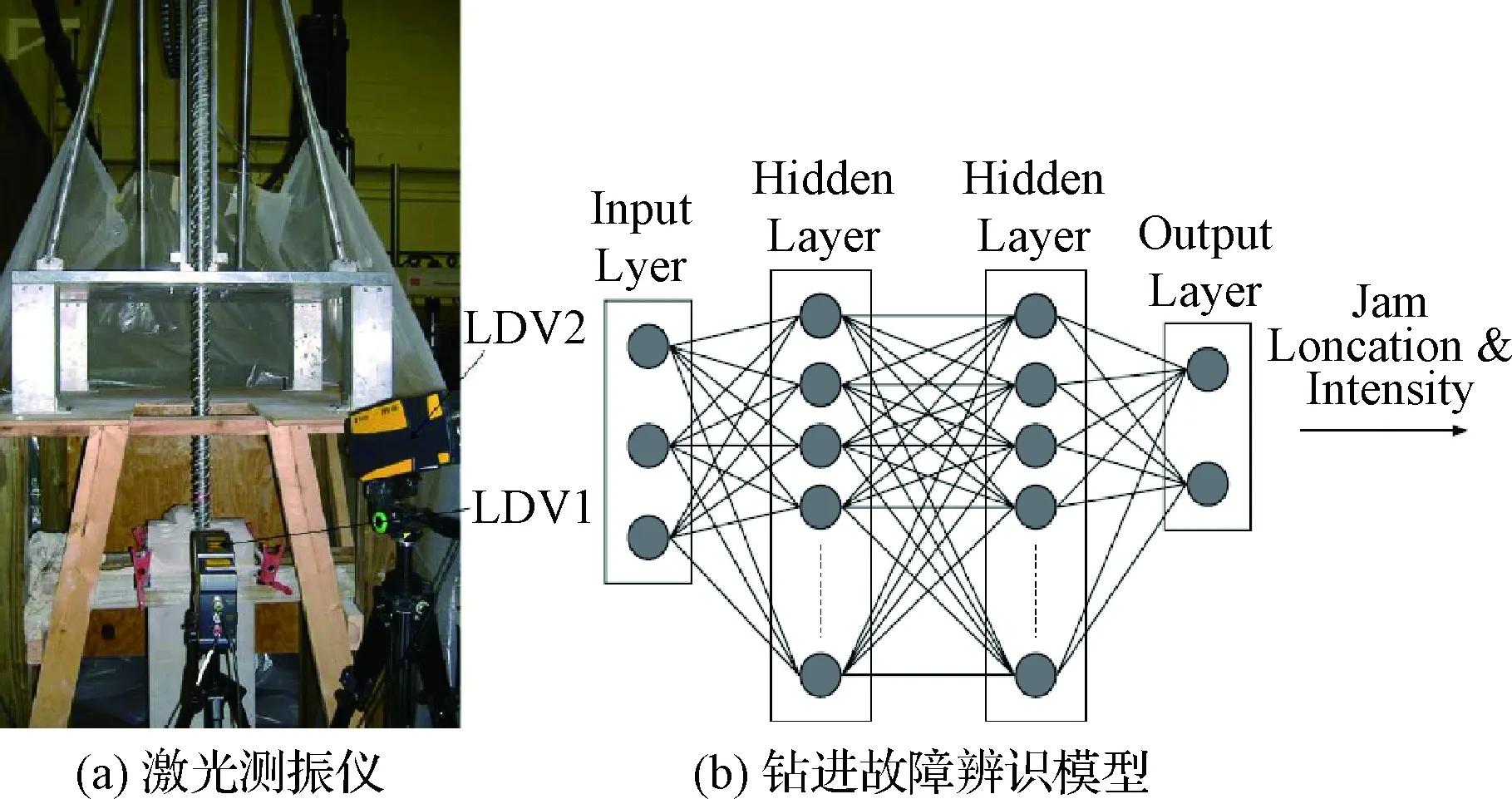
图6 基于激光多普勒测振仪的钻进状态辨识方法Fig.6 Drilling status recognition method based on LDVs
4.2 星球无人自主钻进控制方法
美国NASA联合Honeybee Robotics公司针对火星表面原位探测任务研制了MARTE地面样机[71]。该样机借助公共通讯架构整合了多种不同的传感及驱动单元,并利用遥控遥测接口及任务分布器,通过远程端发送指令至临时处理器,再由处理器完成与分布器的指令传递。针对未来无人深层钻取采样任务,NASA基于多种故障辨识方法开发了具备完全自主钻进控制的DAME钻取采样试验平台[72]。如图7所示,基于规则、振动监测及模型预测三种诊断方法,DAME可将钻进故障诊断结果输入至仲裁程序中,若故障发生的可能性超过预先设定值,则启动故障修复程序,并中断钻进主程序。控制器将匹配故障辨识结果与预先设定的钻进规程,并将控制指令输出至驱动电机进行故障修复动作,待故障修复后返回至钻进主程序[73]。通过此闭环控制方法,DAME能够准确识别出“钻杆卡钻”、“钻杆受拉”等6种故障,并能根据辨识并修复故障。
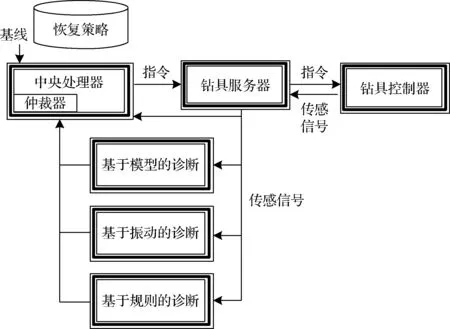
图7 DAME原理样机自主控制方法Fig.7 The control strategy of DAME prototype
5 展望与建议
星球钻取采样,无论在作业对象还是钻探条件等方面都与地面传统钻探存在显著差异。其中,钻探方法、钻进取心特性机理、钻进对象辨识方法及自适应闭环钻进控制等问题是亟待解决的瓶颈问题,是实现全流程最优化钻进的重要基础。综合上述,笔者提出如下四个方面的发展建议。
5.1 依据任务特点选用合适的钻探方法
目前,受航天器运载能力的限制,探测器所能提供的钻进功耗、钻压力等关键指标较地面钻探普遍较小,因此为保证任务的可靠实施,须有针对性的选用合适的钻探方法。针对搭载于巡视器机械臂末端的浅层钻探,可采用超声波钻探器的钻探方法;针对较深层钻探(大于50cm小于2m),多可采用传统的回转冲击钻具的钻探方法,利用电磁电机提供回转和冲击运动;针对深层钻探(大于2m),鉴于目标深度偏大,不宜采用传统的单钻具方案,否则会带来钻具难以安装、样品取心不宜实现等技术问题,此时可采用多杆组接的钻探方法,将钻具分成多段,钻进时样品分段取出。
5.2 研究特定钻探环境下的钻进取心机理
星球钻取采样区别于地面传统钻探的重要特征即为其特殊的钻探环境。针对无水干钻环境(例如:月球),应充分考虑颗粒体固有的剪胀效应、粮仓效应,研究星壤固体颗粒在钻具扰动作用下的几何形态分布、应力状态变化;针对含固态水的钻探环境(例如:火星),需在上述钻进取心机理的基础上,耦合固态水受热引发的三相转换特性,研究星壤此时的切削和排屑特性,揭示钻-壤-水作用下的取心机理。针对既定的钻探条件,为获取影响钻进取心的关键物理参数,需在大量钻进取心实验结果基础上,观测在不同钻进工艺参数及不同钻具构型参数下星壤的宏微观力学行为。
5.3 基于有限传感器资源准确辨识钻进对象
鉴于真实星球钻探环境极为复杂,且可利用的星载资源极为有限,如何在无水干钻的恶劣条件下实现基于有限传感器资源的钻进工况辨识成为急需解决的关键问题。相较于针对钻进对象的辨识方法,钻进故障的辨识方法依据既定的故障种类及故障阈值进行辨识,无法实现在非故障工况下的钻进状态辨识,进而无法平衡全流程采样器所受到的钻进力载和当前取样量,即在保证钻进力载不超过设定的安全阈值前提下应尽可能多获取星壤样品。针对单点单次采样任务,亟需基于现有的力学传感器资源,建立基于力学的钻进对象辨识模型,获取实时准确的钻进状态,为实现最优化钻进提供有效反馈。
5.4 构建具有适应性的无人自主钻进控制方法
对于既定采样钻具,若其配备有一定自主能力的在线闭环控制方法将极大提升采样器面向不确定星球钻探环境的适应能力。当前国外学者采用基于故障辨识的钻进控制方法。此种自主钻进控制方法有效提高了采样器应对故障的解决能力,但需借助额外的仪器且无法实现非钻进故障下的采样器面向不确定钻进对象的钻进力载和取心率最优,即无法通过实时调整钻进工艺参数平衡力载和取心量。为提高深层钻探的自适应能力,当前亟需开展针对钻进对象的在线辨识闭环控制方法,同时需结合钻壤作用力学模型考虑钻进深度对辨识模型的影响,实现全流程的自主最优钻进控制。
6 结束语
星球钻取采样技术是开展深空探测任务亟待解决的关键技术之一。深入理解和掌握国外已有技术对我国未来深空探测的相关技术发展具有重要的借鉴意义。本文系统总结了历次成功实施及正在实施的星球钻取采样任务技术实施途径,着重分析了星壤物理-力学特性、模拟星壤制备工艺及钻壤作用力学特性实验及理论研究的技术现状,深入剖析了包含钻进状态参数辨识及自主钻进控制在内的星球自适应钻进规程关键技术问题,并结合我国现有技术基础,给出了初步的发展建议,可为我国未来开展火星等地外天体的钻取采样任务的方案设计和技术攻关提供技术的参考。
[1] 叶培建, 彭兢. 深空探测与我国深空探测展望[J]. 中国工程科学, 2006, 8(10):13-18. [Ye Pei-jian, Peng Jing. Deep space exploration and its prospect in China[J]. Engineering Science, 2006, 8(10): 13-18.]
[2] 吴伟仁, 于登云. 深空探测发展与未来关键技术[J]. 深空探测学报. 2014, 1(1): 5-17. [Wu Wei-ren, Yu Deng-yun. Development of deep space exploration and its future key technologies[J]. Journal of Deep Space Exploration, 2014, 1(1): 5-17.]
[3] 鄢泰宁, 补家武, 王恒. 月面钻取采样——中国钻探界面临的新任务展望[J]. 探矿工程, 2003, (1): 9-10. [Yan Tai-ning, Bu Jia-wu, Wang Heng. Lunar drilling and coring: prospect of new mission of China drilling[J]. Mining Engineering, 2003, (1): 9-10.]
[4] 欧阳自远, 李春来, 邹永廖, 等. 绕月探测工程的初步科学成果[J]. 中国科学: 地球科学, 2010, 40(3): 261-280. [Ouyang Zi-yuan, Li Chun-lai, Zou Yong-liao, et al. The primary science result from the Chang’e-1 probe[J]. Sci. China Earth Sci., 2010, 40(3): 261-280.]
[5] 徐向华, 梁新刚, 任建勋. 月球表面热环境数值分析[J]. 宇航学报, 2006, 27(2): 153-200. [Xu Xiang-hua, Liang Xin-gang, Ren Jian-xun. Numerical analysis of thermal environment of lunar surface [J]. Journal of Astronautics, 2006, 27(2): 153-200.]
[6] Sture S. A review of geotechnical properties of lunar regolith simulants[C]// Proceedings of the 10th Biennial International Conference on Engineering, Construction, and Operations in Challenging Environments, League City, TX, 2006: 90-95.
[7] 连懿, 陈圣波, 孟治国, 等. 基于嫦娥二号微波辐射计数据月球中低纬度亮温异常区地质分析研究[J]. 地球学报, 2014, 35(5): 643-647. [Lian Yi, Chen Sheng-bo, Meng Zhi-guo, et al. Geological analysis of lunar middle and low latitude brightness temperature anomaly area based on Chang’e-2 mrm data[J]. Acta Geoscientica Sinica, 2014, 35(5): 643-647.]
[8] 吉玮, 王心源, 郭振亚, 等. 对月探测技术研究回顾及展望[J]. 地理与地理信息科学, 2011, 27(2): 6-10. [Ji Wei, Wang Xin-yuan, Guo Zhen-ya, et al. Retrospect and prospect of the moon exploration technologies and researches[J]. Geography and Geo-information Science, 2011, 27(2): 6-10.]
[9] Novara M, Putz P, Marechal L, et al. Robotics for lunar surface exploration[J]. Robotics and Autonomous Systems, 1998, 23(2): 53-63.
[10] Zacny K, Cooper G. Considerations, constraints and strategies for drilling on Mars[J]. Planetary and Space Science, 2006, 54(4): 345-356.
[11] 代树武, 贾瑛卓, 张宝明, 等. 嫦娥三号有效载荷在轨测试初步结果[J]. 中国科学: 技术科学, 2014, 44(4): 361-368. [Dai Shu-wu, Jia Ying-zhuo, Zhang Bao-ming, et al. Chang’e-3 scientific payloads and its checkout results[J]. Sci. Sin. Tech., 2014, 44(4): 361-368.]
[12] 许志琴. 中国大陆科学钻探工程的科学目标及初步成果[J]. 岩石学报, 2004, 20(1): 1-8. [Xu Zhi-qin. The scientific goals and investigation progresses of the chinese continental scientific drilling project[J]. Acta Petrologica Sinica, 2004,20(1): 1-8.]
[13] 冉恒谦, 张金昌, 谢文卫, 等. 地质钻探技术与应用研究[J]. 地质学报, 2011, 85(11): 1806-1822. [Ran Heng-qian, Zhang Jin-chang, Xie Wen-wei, et al. Applications study of geo drilling technology[J]. Acta Geologica Sinica, 2011, 85(11): 1806-1822.]
[14] 鄢泰宁, 冉恒谦, 段新胜. 宇宙探索与钻探技术[J]. 探矿工程(岩土钻掘工程). 2010, 37(1): 3-7.[Yan Tai-ning, Ran Heng-qian, Duan Xin-sheng. Universe exploration and drilling technique[J]. Exploration Engineering (Rock & Soil Drilling and Tunneling), 2010, 37(1): 3-7.]
[15] 肖仕红, 梁政. 旋转导向钻井技术发展现状及展望[J]. 石油机械, 2006, 34(4): 66-70. [Xiao Shi-hong, Liang Zheng. Development and prospect of rotary steering drilling technology[J]. China Petroleum Machinery, 2006, 34(4): 66-70.]
[16] 张辛耘, 王敬农, 郭彦军. 随钻测井技术进展和发展趋势[J]. 测井技术, 2006, 30(1): 10-15. [Zhang Xin-yun, Wang Jing-nong, Guo Yan-jun. Advances and trends in logging while drilling technology[J]. Well Logging Technology, 2006, 30(1): 10-15.]
[17] 冯夏庭, 刁心宏. 智能岩石力学(1)导论[J]. 岩石力学与工程学报, 1999, 18(2): 222-226. [Feng Xia-ting, Diao Xin-hong. Intelligent rock mechanics (1)-introduction[J]. Chinese Journal of Rock Mechanics and Engineering, 1999, 18(2): 222-226.]
[18] Anttila M. Concept evaluation of Mars drilling and sampling instrument[D]. Helsinki: Helsinki University of Technology, 2004.
[19] Harvey B, Zakutnyaya O. Russian space probes: scientific discoveries and future missions[M]. Chichester, UK: Springer, 2011.
[20] Harvey B. Soviet and russian lunar exploration[M]. Chichester, UK: Springer, 2007.
[21] Zacny K, Paulsen G, Szczesiak M, et al. Lunarvader: development and testing of lunar drill in vacuum chamber and in lunar analog site of antarctica[J]. Journal of Aerospace Engineering, 2013, 26(1): 74-86.
[22] Huntress W, Moroz V, Shevalev I. Lunar and planetary robotic exploration missions in the 20th century[J]. Space Science Reviews, 2003, 107(1): 541-649.
[23] Bar-Cohen Y, Zacny K. Drilling in extreme environments: penetration and sampling on earth and other planets[M]. Weinheim: Wiley-VCH, 2009: 347-541.
[24] Zacny K, Paulsen G, McKay C P, et al. Reaching 1m deep on Mars: the icebreaker drill[J]. Astrobiology, 2013, 13(12): 1166-1198.
[25] Zacny K, Bar-Cohen Y, Brennan M, et al. Drilling systems for extraterrestrial subsurface exploration[J]. Astrobiology, 2008, 8(3): 665-706.
[26] Glass B J, Thompson S, Paulsen G. Robotic planetary drill tests[C]// Proceedings of the International Symposium on Artificial Intelligence, Robotics and Automation in Space, Sapporo, Japan, 2010: 464-470.
[27] Won H. Modelling, estimation, and control of robot-soil interactions[D]. Cambridge: Massachusetts Institute of Technology, 2009.
[28] Gouache T P, Gao Y, Coste P, et al. First experimental investigation of dual-reciprocating drilling in planetary regolith: proposition of penetration mechanics[J]. Planetary and Space Science, 2011, 59(13): 1529-1541.
[29] Stoker C R, Cannon H N, Dunagan S E. The 2005 MARTE robotic drilling experiment in rio tinto, Spain: objectives, approach, and results of a simulated mission to search for life in the martian subsurface[J]. Astrobiology, 2008, 8(5): 921-945.
[30] McLennan S M, Anderson R B JF, Bridges J C, et al. Elemental geochemistry of sedimentary rocks at yellowknife bay, gale crater, Mars[J]. Science, 2014, 343(6169): 1244734.
[31] Dave A, Thompson S J, McKay C P, et al. The sampling handling system for the Mars icebreaker life mission: from dirt to data[J]. Astrobiology, 2013, 13(4), 354-369.
[32] Glass B J, Dave A, McKay C P, et al. Robotics and automation for ‘icebreaker’[J]. Journal of Field Robotics. 2014, 31(1): 192-205.
[33] Magnani P G, Re E, Ylikorpi T, et al. Deep drill (DeeDri) for Mars application[J]. Planetary and Space Science, 2004,52(1): 79-82.
[34] Parnell J, Cullen D, Sims M R, et al. Searching for life on Mars: selection of molecular targets for ESA’s Aurora ExoMars mission[J]. Astrobiology, 2007, 7(4): 578-604.
[35] Van W M. Development of the ESA ExoMars rover[C]// Proceedings of 8th International Symposium on Artificial Intelligence, Robotics and Automation in Space, European Space Agency, ESA, 2005: 15-22.
[36] Winnendael M V, Baglioni P, Vago J. Development of the ESA ExoMars rover[C]// Proceedings of the 8th International Symposium on Artificial Intelligence, Robotics and Automation in Space, Munich, Germany, 2005: 15-22.
[37] Finzi A. Space science reviews: SD2-how to sample a comet[M]. Berlin: Springer-Verlag. 2007, 128(1): 281-299.
[38] Dainese C, Finzi A E, Malnati F. Test facility for SD2 comet sampler performance [C]// Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation, Noordwijk, The Netherlands, 2006: 1-8.
[39] Sherrit S, Bao X, Chang Z, et al. Modeling of the ultrasonic/sonic driller/corer (USDC)[C]// Proceedings of the IEEE Ultrasonics Symposium, San Juan, Puerto Rico, 2000: 1037-1040.
[40] Zacny K, Paulsen G, Bar-Cohen Y, et al. Wireline deep drill for exploration of Mars, Europa, and Enceladus[C] //Proceedings of the IEEE Aerospace Conference, Big Sky, Montana, 2013: 1-14.
[41] Badescu M, Ressa A, Lee H J, et al. Auto-gopher: a wireline deep sampler driven by piezoelectric percussive actuator and em rotary motor[C]// Proceedings of SPIE Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems, San Diego, California, 2013: 86-92.
[42] Cherkasov I I, Mikheev V V, Smorodinov M I, et al. 20 years of soviet investigation of lunar soils[J]. Soil Mechanics & Foundation Engineering, 1986, 23(6): 241-244.
[43] Heiken G H, Vaniman D T, French B M. Lunar sourcebook: a user’s guide to the moon[M]. Cambridge: Cambridge University Press, 1991: 475-567.
[44] Anand M, Crawford I A, Balat-Pichelin M, et al. A brief review of chemical and mineralogical resources on the moon and likely initial in situ resource utilization (ISRU) applications[J]. Planetary and Space Science, 2012, 74: 42-48.
[45] Mitchell J K, Bromwell L G, Carrier W D III, et al. Soil mechanical properties at the Apollo 14 site[J]. Journal of Geophysical Research Atmospheres, 1972, 77(29): 5641-5664.
[46] Arslan H, Sture S, Batiste S. Experimental simulation of tensile behavior of lunar soil simulant JSC-1[J]. Materials Science and Engineering A, 2008, 478(1): 201-207.
[47] Li Y, Zeng X W, Wikinson A. Measurement of small cohesion of JSC-1A lunar simulant[J]. Journal of Aerospace Engineering, 2013, 26(4): 882-886.
[48] Richman D L, Wilson S A, Stoeser D B, et al. Manufacture of lunar regolith simulants[R]. Huntsville, Alabama: Marshall Space Flight Center, 2013.
[49] Nagaoka K. Study on soil-screw interaction of exploration robot for surface and subsurface locomotion in soft terrain[D]. Sokendai: The Graduate University for Advanced Studies, 2011.
[50] 郑永春, 欧阳自远, 王世杰, 等. 月壤的物理和机械性质[J]. 矿物岩石, 2004, 12(4):14-19. [Zheng Yong-chun, Ouyang Zi-yuan, Wang Shi-jie, et al. Physical and mechanical properties of lunar regolith [J]. Mineralogy and Petrology, 2004, 12(4): 14-19.]
[51] 蒋明镜, 李立青. TJ-1模拟月壤的研制[J]. 岩土工程学报, 2011, 33(2): 209-214. [Jiang Ming-jing, Li Li-qing.Development of TJ-1 lunar soil simulant[J]. Chinese Journal of Geotechnical Engineering, 2011, 33(2): 209-214.]
[52] Gouache T P, Brunskill C, Scott G P, et al. Regolith simulant preparation methods for hardware testing[J]. Planetary and Space Science, 2010, 58(1): 1977-1984.
[53] 史晓萌, 节德刚, 全齐全, 等. 模拟月壤钻进负载分析与试验研究[J]. 宇航学报, 2015, 35(6): 648-656. [Shi Xiao-meng, Jie De-gang, Quan Qi-quan, et al. Experimental research on lunar soil simulant drilling load analysis[J]. Journal of Astronautics, 2015, 35(6): 648-656.]
[54] Zacny K. Mars drilling-an investigation and development of techniques for drilling exploratory boreholes on Mars[D]. Berkeley: University of California, 2005.
[55] Zacny K, Cooper G A. Investigation of the performance of a coring bit in frozen mud under martian conditions of low temperature and pressure[J]. Journal of Geophysical Research, 2005, 110(E4):225-243.
[56] Ylikorpi T. Preliminary Design of an automated lunar soil sampler[D]. Helsinki: Helsinki University of Technology. 1994.
[57] Gao Y, Thomas E D, Pitcher C. Piercing the extraterrestrial surface: integrated robotic drill for planetary exploration [J]. IEEE Robotics & Automation Magazine, 2015, 22(1), 45-53.
[58] Nagaoka K, Kubata T, Otsuki M, et al. Experimental study on autonomous burrowing screw robot for subsurface exploration on the moon[C]// Proceedings of the International Conference on Intelligent Robotics and Systems, Nice, France, 2008: 4104-4109.
[59] Shi X M, Deng Z Q, Quan Q Q, et al. Development of a drilling and coring test-bed for lunar subsurface exploration and preliminary experiments[J]. Chinese Journal of Mechanical Engineering, 2014, 27(4): 673-682.
[60] 邓宗全, 田野, 唐德威, 等. 用于地外星体探测的一种新结构取芯钻头研究[J]. 机械工程学报, 2013, 49(19): 104-110. [Deng Zong-quan, Tian Ye, Tang De-wei, et al. Research on new structure coring bit for extraterrestrial bodies exploration[J]. Journal of Mechanical Engineering, 2013, 49(19): 104-110.]
[61] Hettiaratchi D R P, Reece A R. Symmetrical three-dimensional soil failure[J]. Journal of Terramechanics, 1967, 4(3): 45-67.
[62] Godwin R J. A review of the effect of implement geometry on soil failure and implement forces[J]. Soil and Tillage Research, 2007, 97(2): 331-340.
[63] McKay D S, Basu A, Nace G. Lunar core 150010/11: grain size, petrology, and implication for regolith dynamics[C]// Proceedings of 11th Lunar Science Conference, 1980: 1531-1550.
[64] 郭峰, 赵伟民, 李瑰贤. 旋挖切削土阻力的理论分析与试验研究[J]. 岩土力学, 2007, 28(12): 2666-2670. [Guo Feng, Zhao Wei-min, Li Gui-xian. Theoretic and experimental study of soil rotary cutting resistance[J]. Rock and Soil Mechanics, 2007, 28(12): 2666-2670.]
[65] Ross I, Isaacs G. Capacity of enclosed screw conveyors handling granular materials[J]. Transactions of the American Society of Agriculture and Engineering, 1961, 4(1): 97-104.
[66] Rosa U A, Wulfsohn D. Constitutive model for high speed tillage using narrow tools[J]. Journal of Terramechanics, 1999, 36(4): 221-234.
[67] 刘飞, 侯绪研, 全齐全, 等. 空心外螺旋钻杆与月壤相互作用力学模型研究[J]. 机械制造, 2011, 49(567): 29-34. [Liu Fei, Hou Xu-yan, Quan, Qi-quan, et al. Research on the interaction between the hollow-external-screw drill rod and lunar soil[J]. Machinery, 2011, 49(567): 29-34.]
[68] Glass B, Cannon H, Branson M, et al. DAME: planetary-prototype drilling automation[J]. Astrobiology. 2008, 8(3): 653-664.
[69] Statham S M. Autonomous structural health monitoring technique for interplanetary drilling applications using laser doppler velocimeters[D]. Atlanta: Georgia Institute of Technology, 2011.
[70] Cannon H N, Stoker C R, Dunagan S E, et al. MARTE: technology development and lessons learned from a mars drilling mission simulation[J]. Journal of Field Robotics, 2007, 24(10): 877-905.
[71] Statham S M, Hanagud S V, Glass B J. Automated, real-time health monitoring of structures for interplanetary exploration systems[J]. AIAA Journal, 2012, 50(12): 2670-2681.
[72] Badescu V. Mars prospective energy and material resources[M]. Berlin: Springer, 2009: 431-460.
[73] McKay C P, Stoker C R, Glass B J, et al. The icebreaker life mission to mars: a search for bimolecular evidence for life[J]. Astrobiology, 2013, 13(4): 334-353.
通信地址:黑龙江省哈尔滨市一匡街2号哈工大科学园2F栋502室3037信箱(150080)
电话:(0451)86413857
E-mail: tangjunyue_hit@163.com
全齐全(1983-),男,副教授,主要从事空间在轨及地面测试技术研究。本文通信作者。
通信地址:黑龙江省哈尔滨市一匡街2号哈工大科学园2F栋502室3037信箱(150080)
电话:(0451)86413857
E-mail:quanqiquan@hit.edu.cn
Review of Planetary Drilling & Coring Technologies Oriented Towards Deep Space Exploration
TANG Jun-yue, DENG Zong-quan, CHEN Chong-bin, WANG Yin-chao, QUAN Qi-quan, JIANG Sheng-yuan, TANG De-wei
(State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150001, China)
Based on the review of planetary drilling and coring technologies, this paper elaborates the mechanical properties of planetary regolith and the preparation method of the soil simulant. Then, the experimental and theoretical drilling and coring characteristics are analyzed respectively. Meanwhile, the self-adaptive drilling strategy containing the drilling states recognition and autonomous drilling control are carefully researched. Based on the above foundations, the technical prospects and advices have been proposed for China lunar exploration.
Deep space exploration; Planetary drilling and coring; Planetary regolith; Drilling and coring characteristics; Self-adaptive drilling
2016-08-18;
2017-05-04
国家自然科学基金(61403106, 51575122);高等学校学科创新引智计划(B07018)
TH132.41
A
1000-1328(2017)06-0555-11
10.3873/j.issn.1000-1328.2017.06.001
唐钧跃(1989-),男,博士生,主要从事地外天体无人钻取采样技术研究。
