万箱级集装箱船实船航速功率测试与分析
2017-07-07贺立敏文逸彦乔继潘
贺立敏, 季 盛, 文逸彦, 乔继潘
(1. 中远海运发展股份有限公司,上海 200135;2. 上海船舶运输科学研究所 航运技术与安全国家重点实验室,上海 200135)
万箱级集装箱船实船航速功率测试与分析
贺立敏1, 季 盛2, 文逸彦2, 乔继潘2
(1. 中远海运发展股份有限公司,上海 200135;2. 上海船舶运输科学研究所 航运技术与安全国家重点实验室,上海 200135)
依据ISO 15016—2015试航规程,中海集装箱运输股份有限公司与上海船舶运输科学研究所联合开发实船航速功率测试与分析处理系统,基于运营船舶对其快速性能进行测试研究。通过某万箱级集装箱船满载载况下运营快速性能实船测试,并对测试数据进行分析,验证了该系统的适用性,可为今后实船测试和运营船舶快速性能评估提供一套行之有效的辅助工具。
ISO 15016—2015试航规程;实船航速-功率测试分析系统;实船试验;满载状态
0 引 言
航速作为衡量船舶性能的重要指标之一,一直受船舶设计单位、船厂和船舶所有人的高度关注[1]。实船航速测定试验[2-4]作为检验船舶快速性的重要手段,直接影响着船舶的顺利交付,是船舶研制和建造过程中的一个重要环节。通过对实船试航测得的相关数据进行分析,可检验和改进理论研究中的数学模型,从而提高模型试验相关分析的精度[5]。
实船航速测定试验通常仅在试航时进行,能直观反映出新造船的快速性能,但在长期运营过程中发现,受机器磨合、船员对船舶的熟悉程度和外部污底变化等因素影响,实船快速性能在实际运营过程中与交付时存在差别,随时间的推移而发生一定的变化。根据经验认为运营约2 a的船舶能真实反映实船实际运营时的快速性能。概述常规新造船实船试航航速测定方法,依照ISO 15016—2015[6]试航规程搭建实船航速功率测试与分析处理系统,利用已投入运营的万箱级集装箱船开展运营船舶满载工况下的试航测试,基于该系统对试航数据进行分析,研究模型试验预报结果与实船测定结果的相关性,验证该系统的可靠性,为以后实船测试及航速预报提供参考。同时,为监测船舶状态和评估船舶运营状况提供辅助工具。
1 实船航速功率试验方法
实船航速功率试验的目的是通过测量船舶航速、主机功率与转速和海况环境等数据,并对其进行修正计算,得到实船在理想环境或合同规定环境下的航速功率曲线,用以验证船舶航速功率是否达到相关要求。
1.1测试内容
通过在航运公司调研,筛选出设备及运营状况较好、投入运营约2 a的船舶,最终选定某万箱级集装箱船作为船舶快速性能实船测试的对象,测试工况为满载工况。统计该船1 a内的运营资料,选取最常用的满载运营吃水12.2 m作为船舶的测试吃水,在码头根据货代公司常用的配载方案完成集装箱配载后,调整压载水接近所需吃水,在航行过程中进行营运船实船航速功率验证试验。该试验主要测试的船舶参数包括艏艉吃水、排水量、航速、轴转速、轴功率和航向等;测试的环境参数包括波高、浪向、水深、水温、气温、气压、风速和风向等。
1.2航速试验海域
为尽量消除不可预期环境因素的影响,ISO 15016—2015对船舶试航海域的环境条件进行限制,主要包括海域位置、风、浪、水深和流等。
1) 航速功率试验应选择在遮蔽的海域进行,以尽量避免小船和商业交通的干扰。由于此次试航的对象为营运船舶,因此试航海域选择太平洋海域。
2) 对于本船垂线间长(Lpp)>100 m的船舶,测试风速应不超过蒲氏六级。


为消除不规则流速的影响,尽量避免在不规则流域为进行航速试验。
1.3测试流程
出航前,测试组上船安装并校验实船航速功率采集系统,并根据液位遥测系统的信息检验船舶吃水的一致性,记录船舶装载情况。当船舶驶入海况相对温和的深水海域之后,测试人员开始准备实船测试。船舶迎浪停船1 h进行状态确认,主要包括轴功率测量设备校验、雷达测波、吃水观测、水温测量和水密度测量;当各状态确认无误之后,开始进行实船航速测定试验。在不同功率工况下,船舶均保持直线航行,尽量少操舵,操舵角≤5°;尽量选择迎浪或随浪航行,航向角与浪向夹角≤45°。待航速稳定之后,开始测速。用差分全球定位系统(Differential Global Position System,DGPS)记录船舶运动轨迹及航速,记录时间一般为5~10 min,相应的测速距离应>1 mile,将数据同步传输到计算机上进行分析。根据ISO 15016—2015相关规范,实船测试路径见图1。
2 实船航速功率测试与分析处理系统
实船航速功率验证试验中应用的测试与分析处理系统见图2,主要包括实船数据采集系统、螺旋桨轴功率测量系统、全球定位系统(Global Positioning System,GPS)、风速仪、波浪雷达、测深仪和数据修正处理系统。
在测试过程中,轴扭矩、轴转速、船位、船向、对地航速、对地航向、相对风速和相对风向由实船数据采集系统连续同步采集;有效波高和波周期单独进行采集及记录;水深信息采用实船已有的测深仪设备采集,通过美国电气制造商协会( National Electrical Manufacturers Association,NEMA)分配器进行信号隔离分配输出。由于该船舵机间与驾驶室连线的距离>160 m,无法可靠连接舵机信号,此次测试舵角信号未采集,试验人员在自动舵中设置限制,以确保测试段舵角变化≤5°。测试方法和设备介绍如下。
2.1双DGPS
对地航速、对地航向、艏向和船位等信息由安装在驾驶室顶部罗经甲板上的双DGPS测得,测试系统双DGPS安装位置见图3。
2.2轴功率测量
螺旋桨转速功率由安装在桨轴的轴功率测量系统采集,该系统的安装位置见图4。轴功率为轴扭矩与转速的乘积。测量系统通过轴上的应变片测量轴的周向偏差,计算得到桨轴扭矩;轴转速通过光学传感器获得。在开始测试之前,对测量系统进行校零。
2.3相对风速风向测量
相对风速和相对风向由超声波风速风向仪测得。在理想状况下,风速风向仪的安装位置应尽可能高且离船体越远越好。由于该船的雷达桅在船舶高速航行时振动幅度过大,最终选择将风速风向仪安装在罗经甲板左舷的栏杆上,具体安装位置见图5。在测试中,通过与实船已有风速仪测得的数据相对比,发现数据吻合度良好。
2.4波浪测量
波浪的测量通过波浪雷达测量和船长目测2种方法进行。波浪雷达安装于船首,便于测量雷达至水面的垂向距离;雷达内部装有的运动传感器,用于测量并修正船舶运动对垂向距离的影响。波浪雷达具体安装位置见6。在试验时,正顶浪停船,利用波浪雷达测量有义波高和波周期,同时由船长进行波浪观测,雷达测量的波高与目测值非常接近,试验选取雷达测量值作为采集记录数据。
2.5数据采集系统
数据采集系统自动采集信号见表1,在测试过程中,数据采集系统对这些信号进行连续、同步采集。水深参数通过实船自带的测深仪进行监测。
3 航速功率验证试验
以此次航速功率试验为例,说明测试与分析处理系统的计算过程。
3.1航速功率试验条件与测量结果
试验前,在出发港分别通过左舷和右舷吃水标志对液位遥测系统传感器的精度进行校对,发现船首、船中、船尾吃水传感器的误差<1%,实船排水量与模型试验差值=0.36%,该差值≤2%。试验海域由船长根据班次计划和气导信息选定,最后选择在太平洋进行相关测试,测试区域的水深均>300 m,无需进行浅水修正。
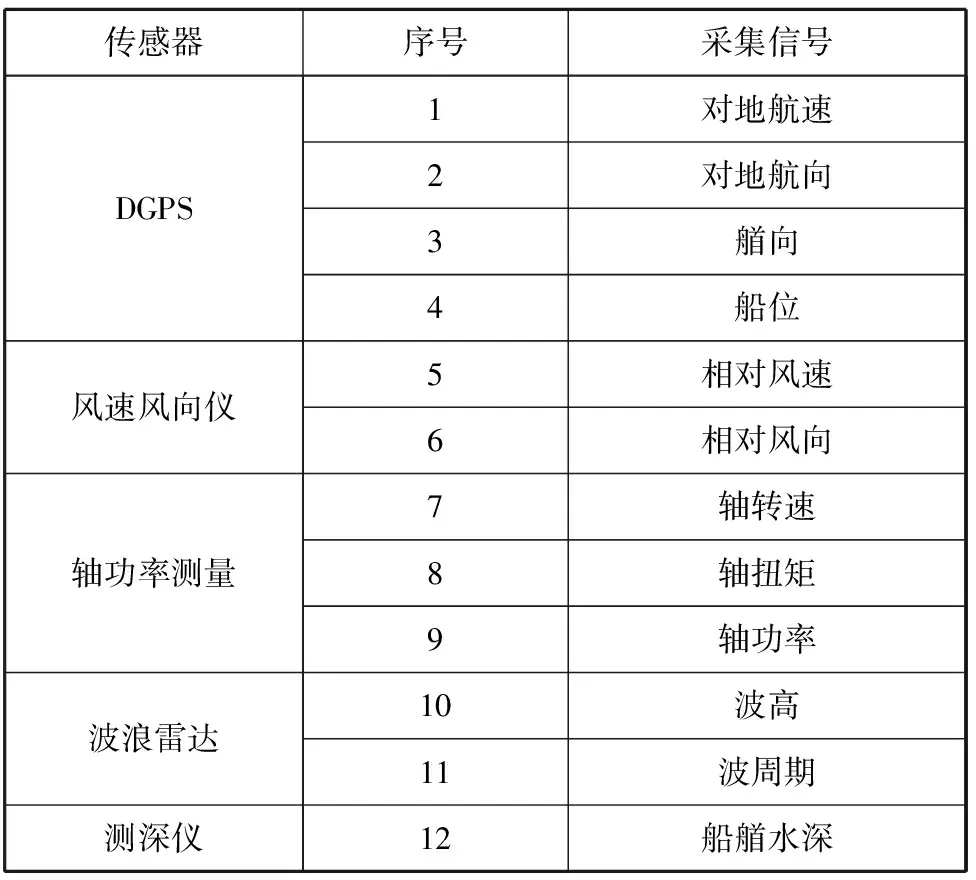
表1 数据采集系统自动采集信号
为获得一条较为合理的实船航速试验曲线,根据规范要求,通常需测量3~6个航速功率点,每个航速功率点需在同一航线上至少往返航行2次。考虑到运营船舶的航行安全和设备性能,降低此次试航高功率点的取值,选定50%MCR,65%MCR,75%MCR(往返2次)和85%MCR进行测试。试航船舶相关参数和测试条件见表2。

表2 试航船舶相关参数和测试条件
3.2航速功率试验结果分析计算
在实船试验时,受海洋环境条件的影响,试验条件非理想状况,根据所记录的海况条件,基于ISO 15016—2015相关规则,采用实船航速功率分析处理系统对实船测试数据进行分析,理想条件下的修正结果见表3。
修正后的功率航速曲线见图7,修正结果点为相同功率设定航次的平均值。修正结果曲线拟合采用相关系数法,即将模型试验结果与试航功率65%MCR及65%MCR以上的试航修正结果相对比,获得平均的相关系数Cp,利用该系数对模型试验结果进行倒推,获取实船修正结果的拟合曲线。
由实船航速功率分析处理系统的计算结果可知,满载载况下的Cp为1.002,与模型试验值吻合良好,验证了系统的可靠性;各功率点往返航次的实船测试结果与模型试验值非常接近,功率误差较小,最大偏差仅为2.2%,既能很好地反映实际运营船舶的快速性能,也能从侧面反映出模型试验航速预报精度。
4 结 语
集装箱船由于装载问题在实船试航阶段很难实现满载试航测试,通常通过压载试航结合模型试验外推满载试航指标,存在一定的不确定性。通过万箱级集装箱船运营工况下的实船试航,验证集装箱船航速预报方法的准确性,为提高模型试验相关分析的精度提供很好的工程依据。

表3 航速功率试航修正结果
此外,在研究IMO相关规范的基础上,开发实船航速功率测试与分析处理系统,通过万箱级集装箱船实船测试,验证系统的可靠性,为今后实船交船测试和营运性能测试提供一套行之有效的辅助工具,为后续能耗监测和能效管理提供基础。
[1] 顾溟宇,王言英,张佳宁.实船航速试验方法及数据分析计算机自动化[J].中国造船,2009,50(3):135-145.
[2] 李晓娇,蒋永旭,柳一点,等.基于ITTC的实船试航航速修正方法[J].船舶标准化工程师,2014(5):1-4.
[3] 陈胜兰.实船试航工作及其项目[J].船舶工程,2011,33(1):74-77.
[4] 顾溟宇.实船航速预报方法研究及其集装箱船试航验证[D].大连:大连理工大学,2013.
[5] 夏利清,范佘明.实船测试航速修正方法评述[J].船舶工程,2005,27(6):49-51.
[6] ISO. Ships and marine technology—Guidelines for the assessment of speed and power performance by analysis of speed trial data: ISO 15016—2015[S].2015.
Speed-PowerMeasurementAnalysisforSeaTrialof10000TEUContainerShip
HELimin1,JISheng2,WENYiyan2,QIAOJipan2
(1. COSCO SHIPPING Development Co.,Ltd.,Shanghai 200135; 2. State Key Laboratory of Navigation and Safety Technology, Shanghai Ship & Shipping Research Institute, Shanghai 200135,China)
This paper introduces a speed-power measurement and analysis system, developed jointly by China Shipping Container Lines Company Limited and Shanghai Ship & Shipping Research Institute, for sea trial of ships based on ISO 15016—2015 trial procedures. The system has been used successfully for the sea trial of a 10 000 TEU container ship under the full load condition.
ISO 15016—2015 trial procedures; ship borne speed-power measurement and analysis system; sea trial; full load condition
2017-04-14
工信部高技术船舶科研计划项目(工信部联装[2014]502号)
贺立敏(1961—),男,上海人,工程师,主要从事柴油机应用及管理、船舶经济运行管理研究。
1674-5949(2017)02-0013-06
U661.3
:A
