智能小车的设计及应用分析
2017-07-07文代晓丽
□ 文代晓丽
智能小车的设计及应用分析
□ 文代晓丽
1. 引言
随着计算机技术、自动化技术的快速发展,智能小车在日常生活和工业生产中扮演越来越重要的角色,已经成为移动机器人研究的重要方向。目前有很多关于智能车的研究,在日常生活、科学研究、复杂环境勘探等方面应用广泛[1]。目前,智能小车是一个集环境信息采集、处理、传输、决策等功能于一体的综合系统。随着Wi-Fi接入技术的普及以及对视频信息采集的需求,基于Wi-Fi进行实时视频传输的智能小车已成为一种趋势。
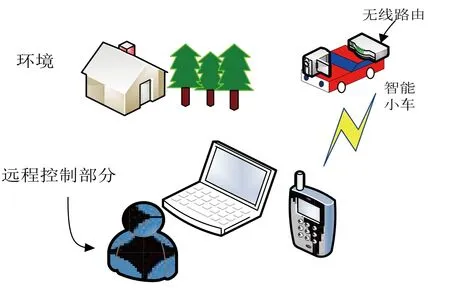
图1 系统功能示意图
2. 系统整体设计
本系统包括两大部分:远程控制中心和智能小车,如图1所示。远程控制中心为手机应用程序或PC机上位机软件。用户通过安装有上位机软件的终端设备与无线路由器进行连接,观测设备环境情况。用户将控制指令发送给智能小车,智能小车中的微控制器对指令进行分析处理,控制小车的前进方向或反馈信息。图2为系统方案框图,智能小车包括电源模块、视频流采集模块、通信模块、电机驱动控制模块[2]。
2.1智能小车硬件电路设计
智能小车采用了4WD(四轮驱动)来帮助汽车克服在泥泞和雪地上的打滑,具备更好的轮胎牵引力与转向力的有效发挥。系统中由Wi-Fi来进行上下行之间的数据传输,通信协议采用TCP/ IP[3]。USB摄像头直接将采集到的视频流传输到路由器上。智能小车所需要的硬件设计主要包括单片机、无线路由、驱动电路和电源模块。
2.2智能小车软件程序设计与远程控制
智能小车中的单片机主要处理来自无线路由器的指令,判断指令类型后,通过控制PWM占空比和差速控制来实现控制的目的[4]。智能小车的远程控制由上位机软件完成,可以是PC机,也可以是Android平台下手机终端。上位机软件主要完成的是对智能小车发送指令和接收无线路由器传输回来的视频流。同时电脑端的上位机还可以完成对传输的视频流进行录制等一系列处理。上位机软件操作流程图如图3所示。

图2 智能小车方案框图
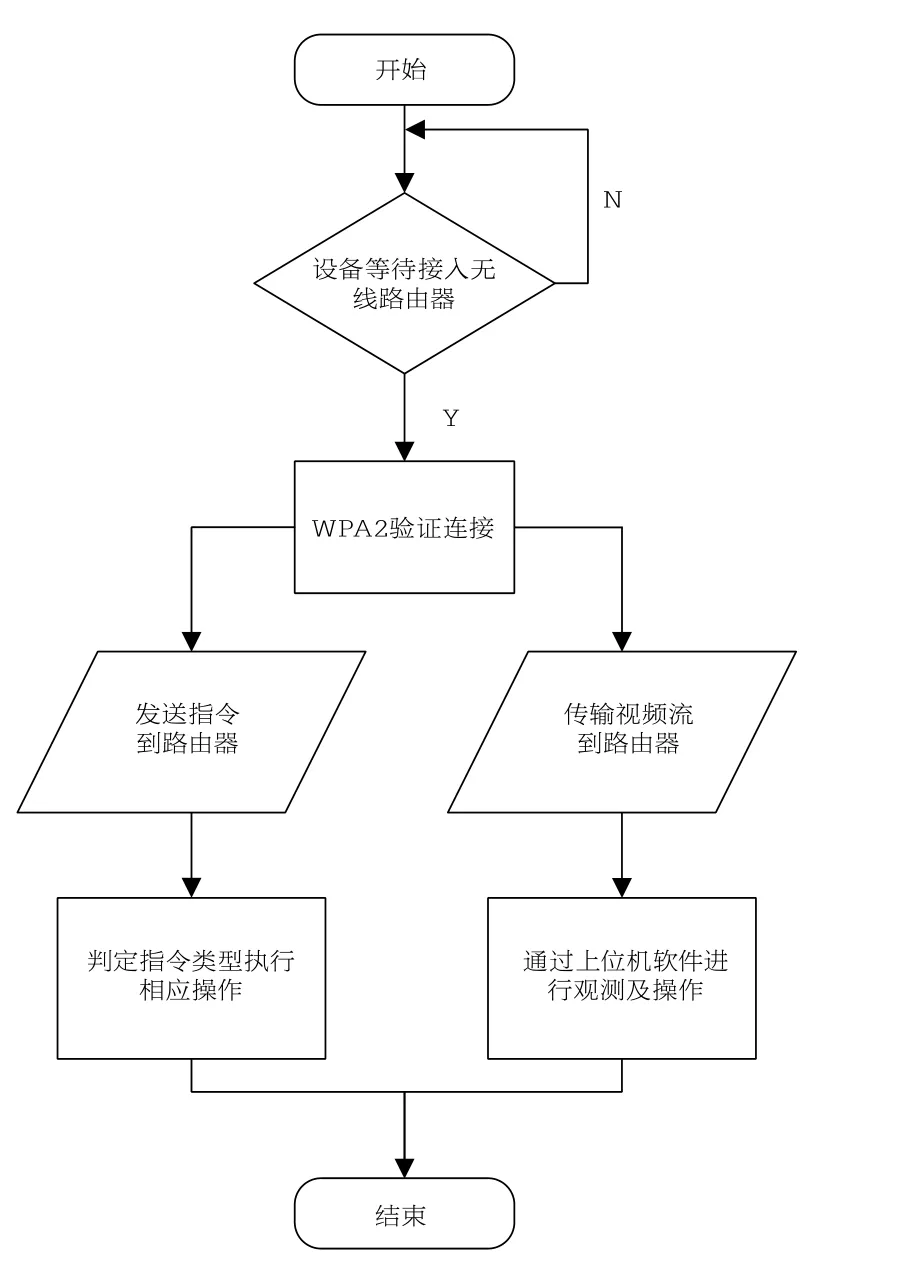
图3 上位机软件操作流程图
3. 应用分析
操作系统不同,相应的控制界面也不同。PC端可以对所观测到的视频流进行存储、拍照等一系列操作,Android平台下手机终端可以更改为通过手机自带的水平陀螺仪实现重力控制的目的。PC终端用户通过将PC机接入无线局域网之后,打开操作界面,选择Wi-Fi连接方式,开启视频,即可对前端设备进行操作及实时观测当前环境。操作界面如图4所示。Android平台下手机终端用户操作流程和PC终端类似,将手机接入无线局域网之后,即可对前端设备进行操作,操作界面如图5所示[5]。操作时,如需切换成重力感应,只需勾选重力感应,便能切换为重力操作,提高用户的使用体验。
智能小车在实际工程中有着广泛的应用前景,其中包括:
(1)有毒环境的探测。由于可以实现远程控制,在智能小车上可以加装摄像设备,同时还可以加装气体监测设备,通过实时数据采集回传给上位机,分析后对环境情况进行判定。
(2)高温高压环境的设备工作状态监控。高温高压环境常常无法进行对环境或者设备进行直接的接触式测量,如果智能小车选用适用于特殊环境下的材料和监测探头,那么利用智能小车可以实现对高温高压环境下各种设备工作状态的远程监控。
(3)空间尺寸约束条件下设备状态监测。在很多设备尤其是设备连接链路中,设备布放的空间有时会极为有限,通过改装智能小车的尺寸,可以使智能小车在狭小空间中实现监测,从而解决由于空间限制无法进行直接监测的环境场合。

图4 PC终端用户操作界面

图5 手机终端用户操作界面
(4)连续动态多方位的实时监测。在规模较大的设备运转环境中,加装固定监测设备将会带来成本上的巨大消耗,同时对监控设备的维护也是一件困难的事情。利用智能小车加装监控设备,完全可以实现在某一空间场合内进行动态连续的多角度实时监控。
除了上述应用外,智能小车随着现代科技进步发展,在尺寸、精度、承载能力和数据传输上,会有更大的提高,同时也会在工程上获得更为广泛应用。
4. 总结
四轮驱动小车由于其适应性强、灵活性高等特点,被广泛地用于人力不方便的先行探测等方面。随着当前网络技术和智能家居技术的飞速发展,四轮驱动小车的远程观测成为新的研究重点。本文以四轮驱动小车为研究对象,结合Wi-Fi无线网络,设计了相应的硬件平台,构建了一个远程控制智能小车系统。本系统提供人性化的控制界面,保证了其普及程度和低成本,增加了使用范围。笔记本、手机等手持终端设备可以大大提高用户使用的快捷性,在工程上具有广泛的应用价值。■
(作者系北京信通传媒有限责任公司JCIN编辑部主任,目前主要研究方向为通信与信息网络。)
[1]冯华山.基于Internet的远程控制机器人系统[D].西安:西北工业大学,2004.
[2]李旭东,廖中,浩孟娇.基于CMOS摄像头的智能车控制系统设计及实现[J].吉林大学学报(信息科学版),2013(4):414-418.
[3]朱阳,王伟成,王民慧. WiFi技术在智能车数据通信中的应用[J].传感器世界, 2014(7):35-39.
[4]KASZUBIAK J,TORNOW M,KUHN R W,et al.Real-Time Vehicle and Lane Detection with Embedded Hardware[C]. Proceedings of the IEEE Intelligent Vehicles Symposium . 2005:619-624.
[5]王林, 段廷瑞, 顾士豪.基于Android的嵌入式视频智能车的软件设计[J].河南工程学院学报(自然科学版), 2014(4):55-58.
