660MW机组给水RB控制策略分析与完善
2017-07-06梁魁西
梁魁西
摘 要:通过芜湖发电有限公司给水泵RB控制策略动作过程时的分析,发现其中控制逻辑不足并进行优化完善,提高给水泵RB控制策略的可靠性,并为同类机组给水RB控制策略提供良好的参考价值。
关键词:RUNBACK;给水泵;闭锁;控制策略
1 概述
芜湖发电有限责任公司两台660MW机组采用单元制炉机电网络集中控制方式分散控制系统,DCS选用FOXBORO I/A型分散控制系统,机组协调控制系统设计有RB功能,RB功能包括磨煤机RB、引风机RB、送风机RB、一次风机RB和给水RB。当发生部分主要辅机故障跳闸,使锅炉最大出力低于给定功率时,协调控制系统将机组负荷快速降低到实际所能达到的相应出力,并能控制机组在允许参数范围内继续运行称为RUNBACK(辅机故障减负荷,简称RB)。
2 给水RB功能介绍
两台汽动给水泵A、B运行,任一台汽动给水泵跳闸且机组负荷指令大于辅机最大出力限制时触发给水RB信号,机组负荷目标值降至350MW,主汽压力目标值17MPa。
给水RB动作过程控制设计:
(1)给水RB动作后连锁跳闸A磨煤机,A磨煤机跳闸后延时10秒跳闸B磨煤机,B磨煤机跳闸后延时10秒跳闸E磨煤机。燃料主控保持自动运行方式,在RB发生的前22秒内闭锁燃料主控增指令,防止跳磨过程中运行磨煤机的给煤量大幅增加。
(2)给水RB动作后,锅炉主控由自动切为手动运行,锅炉主控输出按照200/分钟滑至RB动作后锅炉主控输出目标值。
(3)给水RB动作后,汽机主控保持自动运行方式。由于锅炉主控切手动,此时机组运行方式由协调方式切为汽机跟随方式,汽机主控调节对象由调节机组负荷改为调节主汽压力。主汽压力设定值为RB动作对应压力目标值及当前主汽压力实际值,两者取大值。
3 给水RB动作过程分析
因A小机轴承振动超限导致A小机跳闸,给水RB触发。RB动作前机组CCS控制方式投入,RB功能投入,机组实发功率662.33MW,主汽压力24.85MPa,总给水流量1865.26T/H,总风量2116.89T/H,总煤量276.36T/H,2台汽泵同时运行,6台磨煤机ABCDEF同时运行。
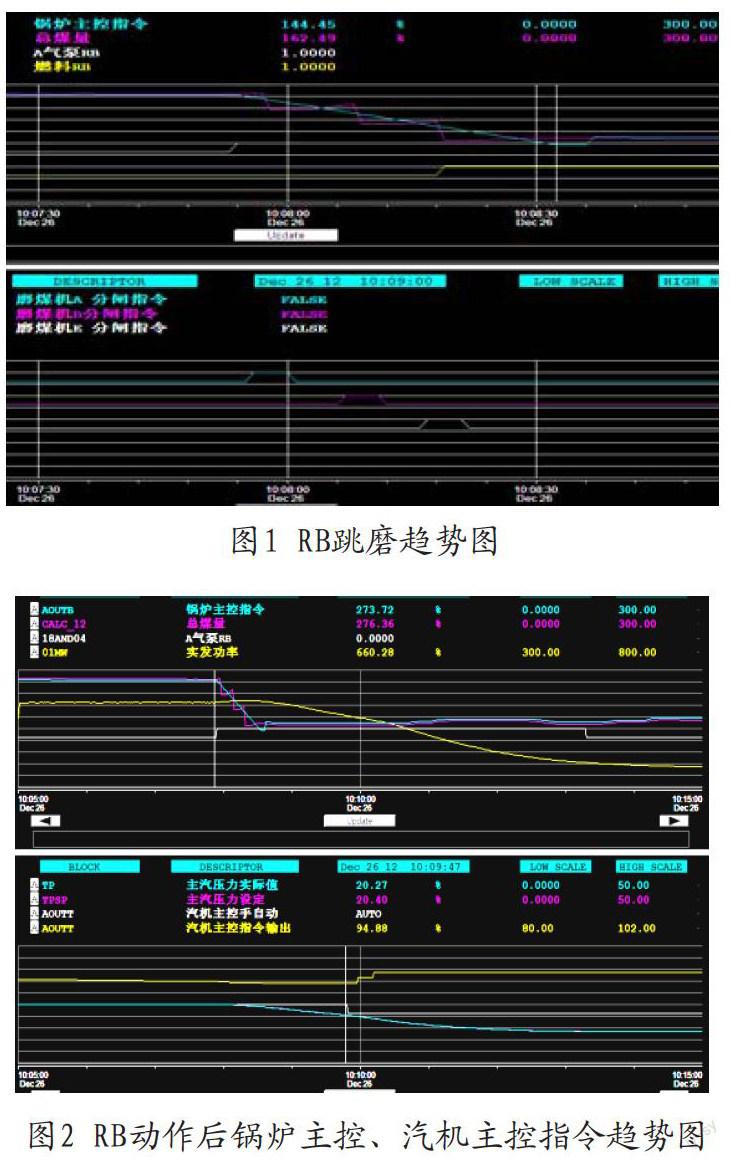
(1)跳磨过程:给水RB动作后,触发磨煤机ABE跳闸指令,顺序为ABE,时间间隔为上一台磨煤机分闸后延时10秒触发下一台磨煤机跳闸指令。
(2)锅炉、汽机主控输出:给水RB动作前,协调投入,锅炉主控输出276.36,机组实际负荷662.33。给水RB动作后,切锅炉主控为手动,锅炉主控由10:07:54时276.36 T/H滑至10:08:33时144.45T/H,時间39秒,速率与设计速率200/分钟吻合。但从燃料主控来看,RB动作后22秒内闭锁增,按照200/分钟的速率,22秒后锅炉主控指令为203,当燃料主控的闭锁增指令消失,燃料主控会跟随锅炉主控指令先上升再下降。
给水RB动作后,汽机主控保持自动运行方式,此时机组运行方式由协调方式切换为汽机跟随,汽机主控由调节负荷改为调节主汽压力。主汽压力设定值为RB动作对应压力目标值及主汽压力实际值,两者取大值。由图2可以看出,前期汽机调门不动,当主汽压力实际值低于RB动作对应压力目标值时,汽机调门关小,维持主汽压力。10:07:54时主汽压力为24.85MPa,10:09:47时运行人员切汽机主控手动,此时主汽压力为20.40MPa,整个过程中汽机主控指令为95.09%未变化,调门开度未动作,压力下降速率为2.36MPa/分钟。
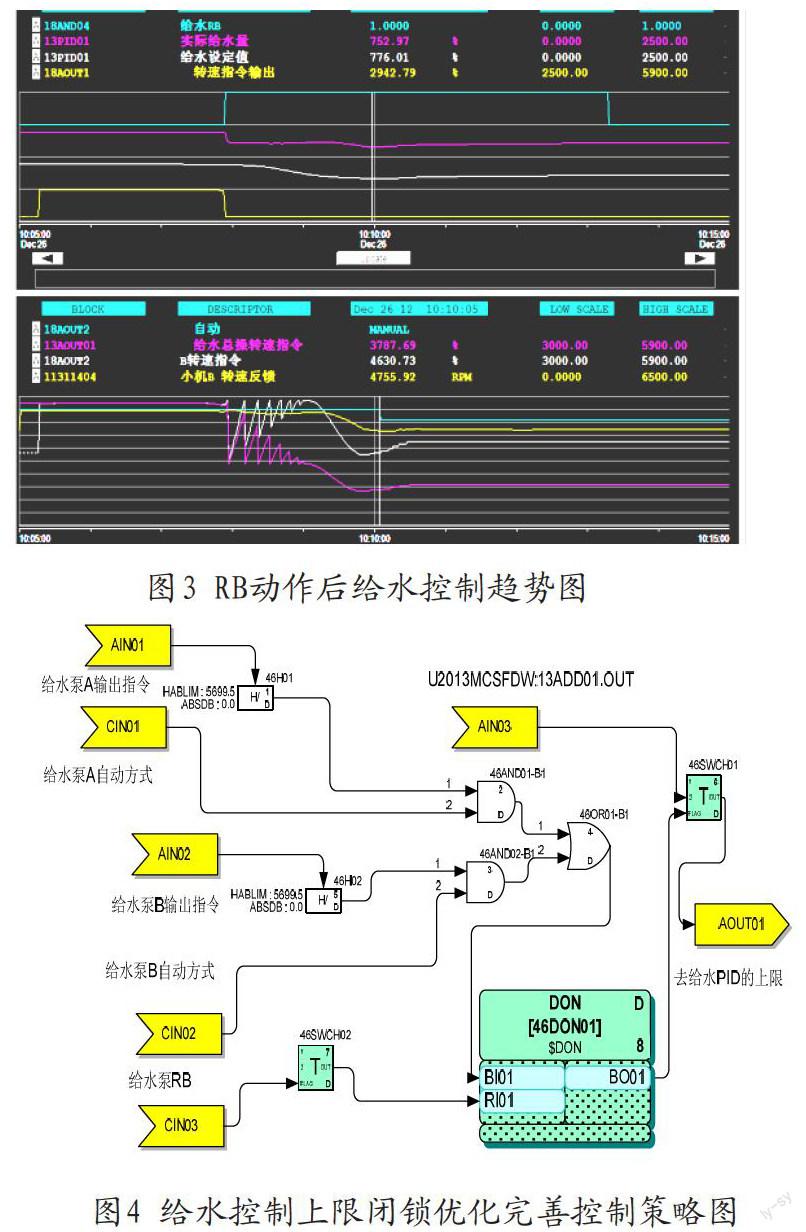
(3)给水调节过程:10:07:54A汽动给水泵跳闸RB动作,给水流量实际值由10:07:54时1865.26T/H经3秒时间突降至1079.86T/H后,A汽动给水泵转速控制切手动,指令输出为2942(汽动给水泵输出指令最小限为3000);此时因实际给水量急剧减少,与设定值产生巨大偏差,给水总操PID输出指令增加,使B汽动给水泵转速指令由5750上升为最大值5800(最大限为5800,此时产生(B-A)/2=1400的偏置),使给水总操指令闭锁在(A+B)/2=4400,致使B汽动给水泵指令急剧下降到4400,但此时给水总操PID输出又继续增加以及偏置(设有速率变化)逐步变大,使B汽动给水泵又快速达到上限5800,进而往复作用产生锯齿波(如图3),但由于时间短,B汽动给水泵没有调整实际转速变化,否则会对给水系统产生巨大的扰动。10:09:04,偏置上升至1400,锯齿波消失,10:10:02时实际给水量滑至最小值755.25T/H。
经过分析由于偏置的加入有一定的速率变化1250/分钟,产生偏置1400完全加入到B汽动给水泵输出指令中需要68秒的时间,而锯齿波产生的时间段(10:07:54至10:09:02)正好与之吻合,为了消除该不稳定区,进一步优化组态,使用变参数的控制方式,即在给水泵RB时,在一段时间内不闭锁给水总操的输出。
4 总结
本次给水RB过程连锁动作时连锁跳闸磨煤机、锅炉主控、汽机主控基本正常,但给水RB自动控制功能存在部分异常,如果控制不好很可能触发MFT,导致停炉的严重后果,所以我们经过仔细分析动作过程完善了给水RB逻辑:
(1)给水总操指令上限闭锁功能存在缺陷,未充分考虑RB状况下偏置上升时间,对给水自动产生一定扰动,同样,其他RB功能也存在该缺陷,也需修改闭锁逻辑。
(2)RB动作后22秒内燃料主控闭锁增,该时间不足以使锅炉主控下滑至锅炉主控目标值,燃烧控制存在扰动,该时间需充分考虑各种工况重新设定。
参考文献
[1]李铁柱.给水泵RUNBACK动作失败原因分析及改进措施[J].宁夏电力,2006,(4):36-40.
[2]葛智平.機组全协调方式下RB优化控制策略的探讨与应用[J].中国电机工程学报,2007,27(1):115-117.
(作者单位:芜湖发电有限公司)
