一种仿生机器鼠的跟踪与避障策略
2017-07-05满春涛曹淼曹永成宋永博
满春涛, 曹淼,, 曹永成, 宋永博
(1.哈尔滨理工大学 自动化学院,黑龙江 哈尔滨 150080;2. 中国科学院自动化研究所 复杂系统管理与控制国家重点实验室,北京 100190;3. 黑龙江东方学院 电气工程及其自动化教研室,黑龙江 哈尔滨 150086)
一种仿生机器鼠的跟踪与避障策略
满春涛1, 曹淼1,2, 曹永成3, 宋永博2
(1.哈尔滨理工大学 自动化学院,黑龙江 哈尔滨 150080;2. 中国科学院自动化研究所 复杂系统管理与控制国家重点实验室,北京 100190;3. 黑龙江东方学院 电气工程及其自动化教研室,黑龙江 哈尔滨 150086)
针对一种新型仿生机器鼠平台的运动规划问题主要包括跟踪、避障等问题,依据仿生机器鼠的双目视觉系统以及多自由度的机械结构,根据驱动电机的特性,建立仿生机器鼠的扭腰、抬身、攀爬等动力学模型,采用“记忆”目标鼠的特征、“学习”最优避障路径、“推断”目标鼠的运动方向等方法,实现了仿生机器鼠的跟踪与避障行为,提出了一种基于仿生学原理的仿生机器鼠的跟踪与避障策略。在一种新型仿生机器鼠平台上的实验结果表明,相比与基于虚拟阻抗模型的控制方法,该跟踪与避障策略能够更好地实现仿生机器鼠的跟踪与避障行为,从而验证了策略的可行性与有效性。
机器人;仿生机器鼠;仿生学;双目视觉系统;运动规划
0 引 言
随着人们生活压力的不断增大,越来越多的人开始出现各种心理疾病,比如焦虑、抑郁等[1,2]。相应地,很多研究人员开始着手心理疾病病因的研究,同时研制新型的治疗药物。然而由于患者的个体差异较大,在临床试验中很难直接确定药效,所以研究人员经常利用模式动物(注:模式动物指的是为了保证实验动物的研究更具有可重复性和准确性,而建立起的标准化的实验动物)[3],尤其是模式鼠,代替人类来验证药效。
研究表明,社交互动能力的变化是人类以及模式动物心理疾病的最重要的症状[2]。在临床试验中,研究人员通常利用模式鼠来验证药物对其社交互动行为所产生的影响。然而模式鼠的社交互动行为实验是不可再现的,所以研究人员很难控制和评估模式鼠的社交互动行为。仿生机器鼠(下文统称为智能鼠)的出现解决了上述难题,由于其具有可编程、行为可再现等特点,所以其为研究模式鼠的社交互动行为提供了新颖的实验方法[4]。
在智能鼠的社交互动行为实验中智能鼠的行为必须是自然、安全、可控的,本文中智能鼠可以自然地模仿生物鼠的行为(比如抬身、扭腰等),所以如何让智能鼠的行为更加安全、可控变得十分重要。若要保证智能鼠行为的安全性、可控性,就必须研究智能鼠的运动规划问题,其中最重要的是智能鼠的跟踪与避障问题。解决智能鼠的跟踪与避障问题主要有以下两个难点:1)如何让智能鼠具有生物鼠的思考能力,从而可以像生物鼠一样完成跟踪与避障任务;2)如何解决跟踪过程中目标鼠快速、无规则移动的问题。
在之前关于智能鼠运动规划的研究中,Shi等人提出一种基于虚拟阻抗模型的控制方法[5-6](注:基于虚拟阻抗的控制算法是指通过设置虚拟接触面,利用任务智能鼠与目标智能鼠或者空间障碍物之间的虚拟阻抗产生可对任务智能鼠实现协调控制的虚拟力)。但是由于没有视觉反馈,这种基于虚拟阻抗模型的控制方法的准确性和鲁棒性远不能满足智能鼠运动控制的要求。基于以上考虑,本文提出一种基于双目视觉的智能鼠的跟踪与避障策略。
接下来,本文将从以下几个方面展开讨论:第一部分主要介绍智能鼠的硬件结构、控制系统以及双目视觉系统等内容;第二部分将要着重介绍智能鼠的跟踪与避障策略,分为智能鼠的跟踪策略、避障策略、综合运动策略等三方面内容;第三部分将会利用该智能鼠本体验证智能鼠的跟踪与避障策略,同时给出相应的实验结果;最后一部分是关于实验结论以及未来研究方向的描述。
1 智能鼠本体介绍
本节主要介绍智能鼠本体的结构,包括硬件结构、控制系统、双目视觉系统等内容。
1.1 智能鼠的硬件结构
该智能鼠的硬件结构如图1所示,该智能鼠平台有如下几个特点:1)该智能鼠的物理尺寸为240 mm×65 mm×95 mm,与成年雌鼠的大小相似;2)该智能鼠有13个自由度,由13个电机驱动;3)由于该智能鼠各个关节的运动特点不同,所以该智能鼠的驱动电机分为3类,其中6个直流电机用于驱动腰部和后轮,3个舵机用于驱动头部、颈部和尾部,4个直流微电机用于驱动前肢;4)由于该智能鼠具有丰富的自由度而且不同关节由不同的电机驱动,所以在智能鼠的社交互动行为实验中其可以灵活地模仿生物鼠的抬身、扭腰、攀爬等行为。
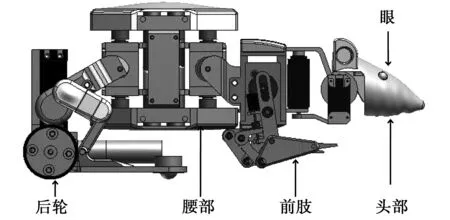
图1 智能鼠硬件结构图Fig.1 Structure of the intelligent rat
1.2 智能鼠的控制系统
该智能鼠的控制系统板如图2所示,控制系统框图如图3所示,主要包括:ARM控制器、无线传输模块、电机驱动模块等。其中,ARM控制器使用的是STM32F103RG,无线传输模块使用的是CS8635蓝牙模块,电机驱动模块用于驱动该智能鼠的所有电机。STM32F103RG作为控制系统的核心,其作用是控制各个电机的运行状态,同时通过无线传输模块将该智能鼠的状态信息(比如移动速度、各个关节的关节角等)发送给远程PC。
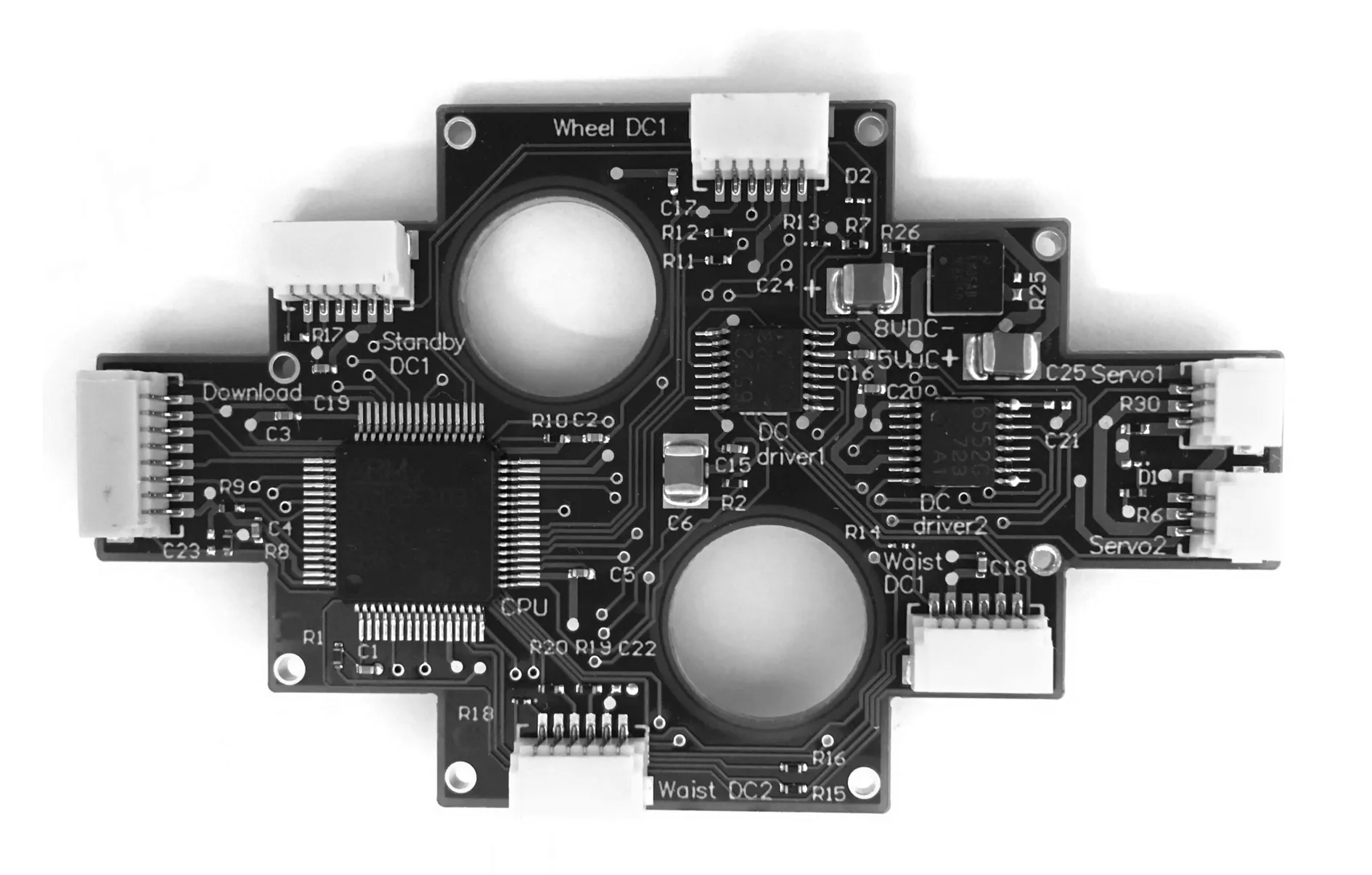
图2 智能鼠的控制系统板Fig.2 Control board of the intelligent rat
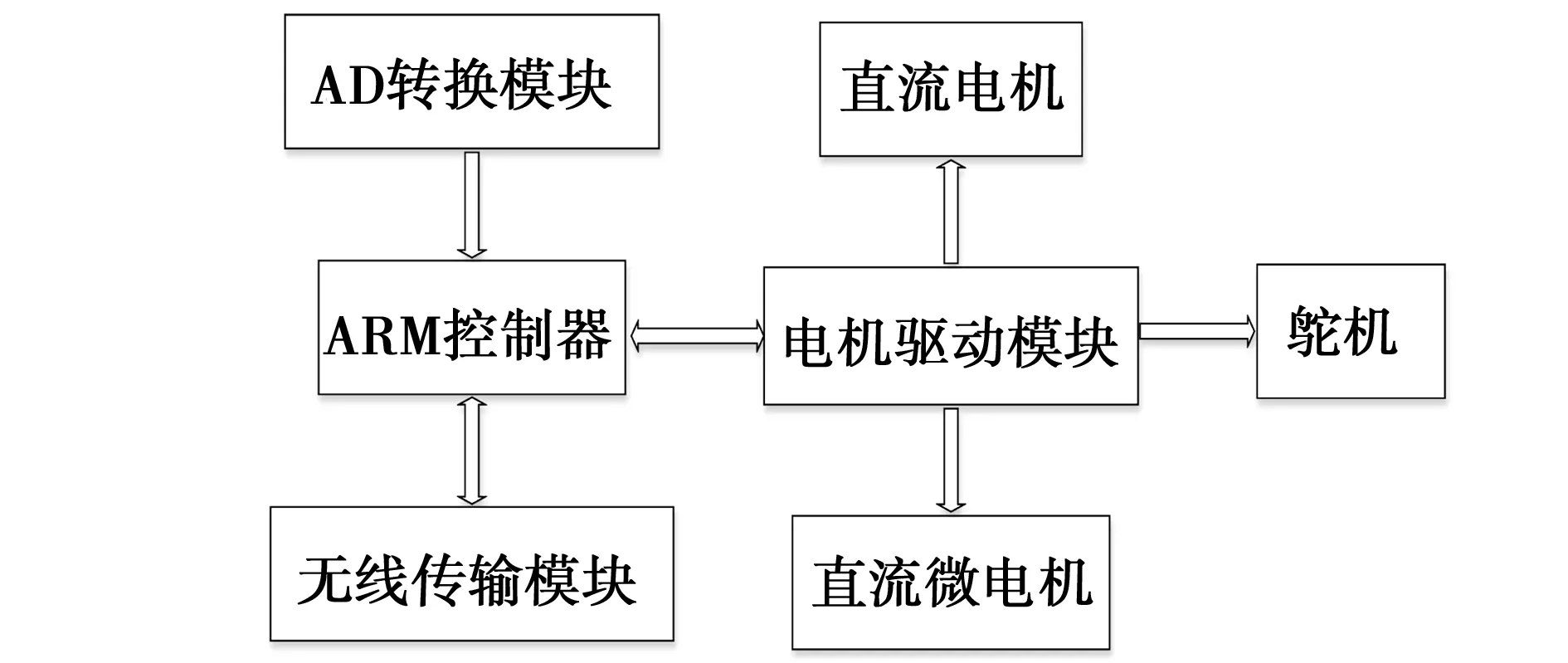
图3 智能鼠的控制系统框图Fig.3 Control system diagram of the intelligent rat
1.3 双目视觉系统
该智能鼠采用双目视觉系统,有以下两点考虑:1)采用传感器的方式不符合本文仿生学的研究思路,而双目视觉系统可以模仿生物鼠的眼睛去感知周围环境;2)单目视觉系统无法获取障碍物的深度信息,而双目视觉系统可以获取障碍物的深度信息。

在执行跟踪与避障任务之前,必须对该智能鼠的双“眼”进行标定,本文采用一种新的相机标定法进行相机标定。首先,采用张正友标定法获取摄像头的内参数和外参数[8];其次,由于移动过程中摄像头在世界坐标系中的位置是变化的,所以获取摄像头的外参数之后需要把世界坐标系转换到机器人坐标系,方法如下:
将机器人坐标系的原点定在两个摄像头的中点,其在世界坐标系中的位置坐标已知,设为 (-t1,-t2,-t3);假设某个点在世界坐标系中的位置(xw,yw,zw),那么其在机器人坐标系中的位置为(xw+t1,yw+t2,zw+t3)。
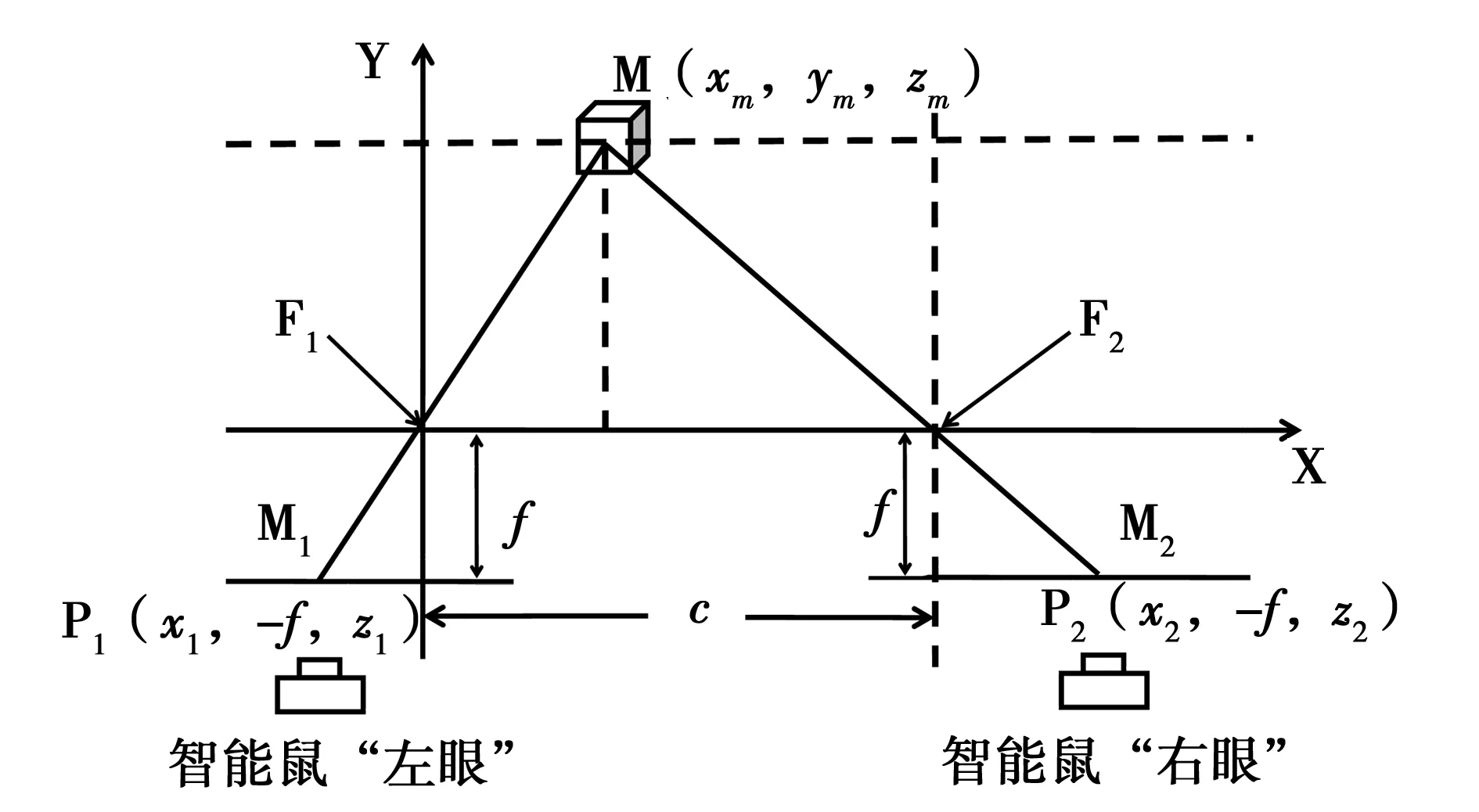
图4 智能鼠双目视觉系统的测距原理Fig. 4 Binocular vision system of the intelligent rat
2 智能鼠的跟踪与避障策略
本节提出了一种基于仿生学的跟踪与避障策略,其意图是使智能鼠可以像生物鼠一样具有记忆、学习、推断能力,从而以生物启发的方式完成跟踪与避障任务。下面将着重介绍智能鼠的跟踪策略、智能鼠的避障策略、智能鼠的综合运动策略等三方面内容。
2.1 智能鼠的跟踪策略
智能鼠的跟踪过程主要有以下两个难点:1)跟踪过程中,目标智能鼠可能会发生位姿突变(比如大幅度扭腰),这会给目标智能鼠的特征点匹配带来很大的困难;2)在实际跟踪生物鼠的过程中,目标鼠的位置可能会发生突变,然而本文的实验过程中不会出现目标鼠位置突变的情况,所以暂不考虑这种情况。
研究表明[9],生物鼠的记忆时间长达5个月之久。基于此,本文提出了一种基于“记忆”的跟踪策略,其原理如下:1)在进行跟踪任务之前,任务智能鼠的“大脑”(ARM控制器)中“记忆”(存储)了目标智能鼠的身体特征,比如头部特征、前肢特征、尾部特征等;2)跟踪过程中,如果目标智能鼠发生位姿突变(本文以大幅扭腰为例),任务智能鼠可以通过“大脑”中“记忆”的其他特征进行目标智能鼠的识别,同时计算出目标智能鼠的扭转角度,从而判断目标智能鼠的移动方向—如果目标智能鼠继续前进,任务智能鼠需要作出相同幅度的扭腰动作才能持续跟踪目标智能鼠,反之,如果目标智能鼠转身朝向任务智能鼠移动,任务智能鼠可通过面部特征朝向目标智能鼠移动,直至二者足够接近,任务智能鼠完成跟踪任务。
智能鼠的跟踪策略流程图如图5所示,具体跟踪过程如下:1)在首次执行跟踪任务之前,任务智能鼠需要“记忆”目标智能鼠的所有特征包括头部、尾部、前肢等身体特征;2)在跟踪过程中任务智能鼠不断重复预处理过程(包括:目标检测、目标智能鼠的特征提取以及特征点匹配),并且计算其与目标智能鼠的相对距离以及目标智能鼠的移动速度,如果任务智能鼠与目标智能鼠足够接近且目标智能鼠静止,则任务智能鼠完成跟踪任务;3)最后,根据生物鼠的行为特点,跟踪结束后,任务智能鼠做出抬身、攀爬、扭腰等动作。
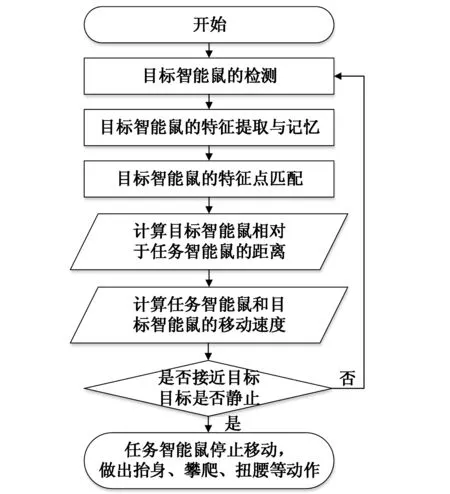
图5 智能鼠的跟踪策略流程图Fig.5 Tracking strategy of the intelligent rat
本文提出的智能鼠的跟踪策略以及综合运动策略中都涉及到目标智能鼠相对于任务智能鼠的距离以及任务智能鼠和目标智能鼠的移动速度等的计算,这里本文给出的方法如下:1)1.3节中提到,将机器人坐标系的原点定在任务智能鼠两个摄像头的中点,此时以目标智能鼠尾部中心点为特征点,通过双目视觉算法即可计算目标智能鼠相对于任务智能鼠的距离dt;2)任务智能鼠的运动速度由任务智能鼠控制系统控制,为已知量;3)前面得出了目标智能鼠相对于任务智能鼠的距离dt,同时任务智能鼠观测相对距离的时间间隔是确定的(本文取为1s),所以目标智能鼠相对于任务智能鼠的速度就可以计算出来,即vt=dt-dt-1。
2.2 智能鼠的避障策略
本文假设智能鼠的避障实验如图6所示,智能鼠的避障过程主要有三个问题需要解决:1)路径规划问题:要保证智能鼠的避障路径为最优路径;2)路径记忆问题:在获得最优路径之后,智能鼠需要“记忆”该避障路径;3)危险路径的判断问题:研究表明[10],如果遇见危险情况,生物鼠会将其长久记忆下来,所以危险路径的判断与记忆也是需要解决的问题。
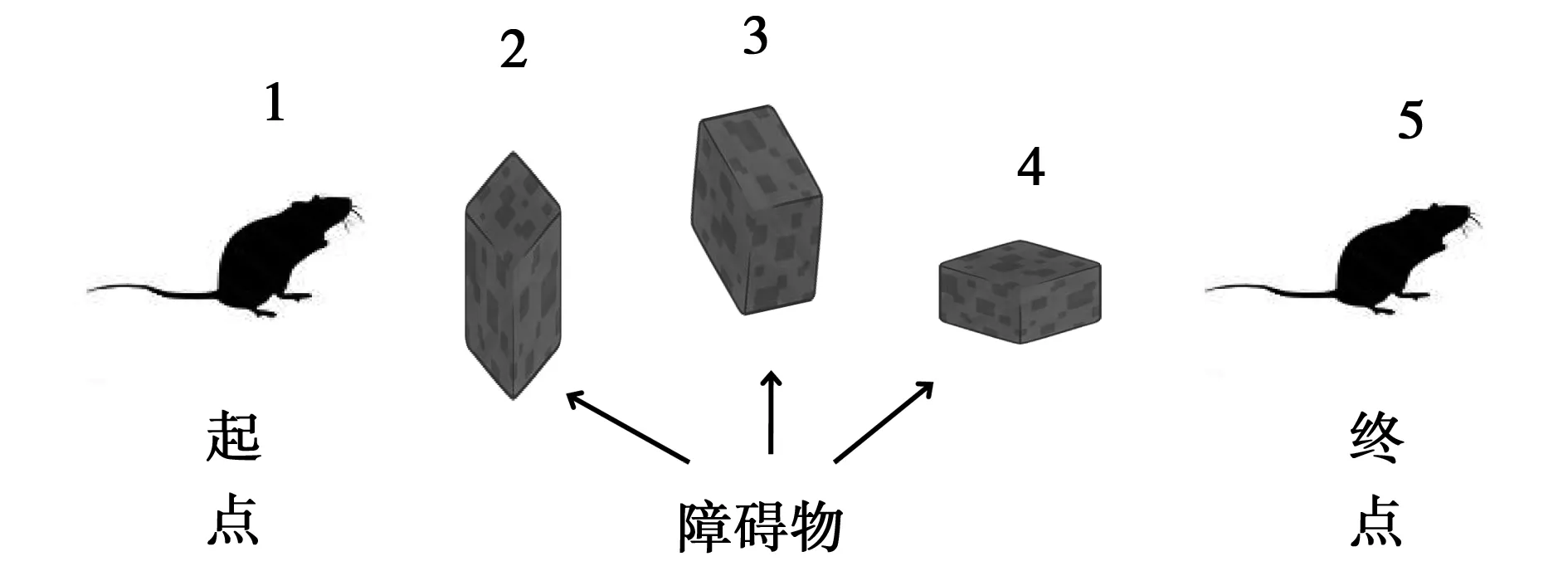
图6 智能鼠的避障实验环境Fig.6 Obstacle environment of the intelligent rat
为了解决上述问题,本文提出了一种基于强化学习的避障策略[11]。该强化学习算法的规则如下:

上式中:1)Q矩阵可以视为智能鼠的“大脑”,其存储着智能鼠通过“学习”获得的知识,初始化Q为0;2)R矩阵为环境奖励矩阵,其中,R(状态,行为)为介于0至100的数值;3)γ(注:参数γ的设置是为了保证Q收敛。如果γ更接近0,智能鼠趋向于只考虑瞬时奖励值,反之如果更接近1,则智能鼠更侧重于延迟奖励)的取值范围是0~1,本文取γ为0.6。

本文提出的避障策略的流程图如图7所示,具体过程如下:1)避障过程中,任务智能鼠重复障碍物的检测过程,判断前方是否存在障碍物,如果存在障碍物则抬身观察障碍物大小、相对距离以及熟悉程度(是否为危险障碍物等);2)经过多次避障过程,任务智能鼠可以“学习”到一条最优避障路径;3)到达终点之后,任务智能鼠抬身、扭腰,至此,任务智能鼠完成避障任务。
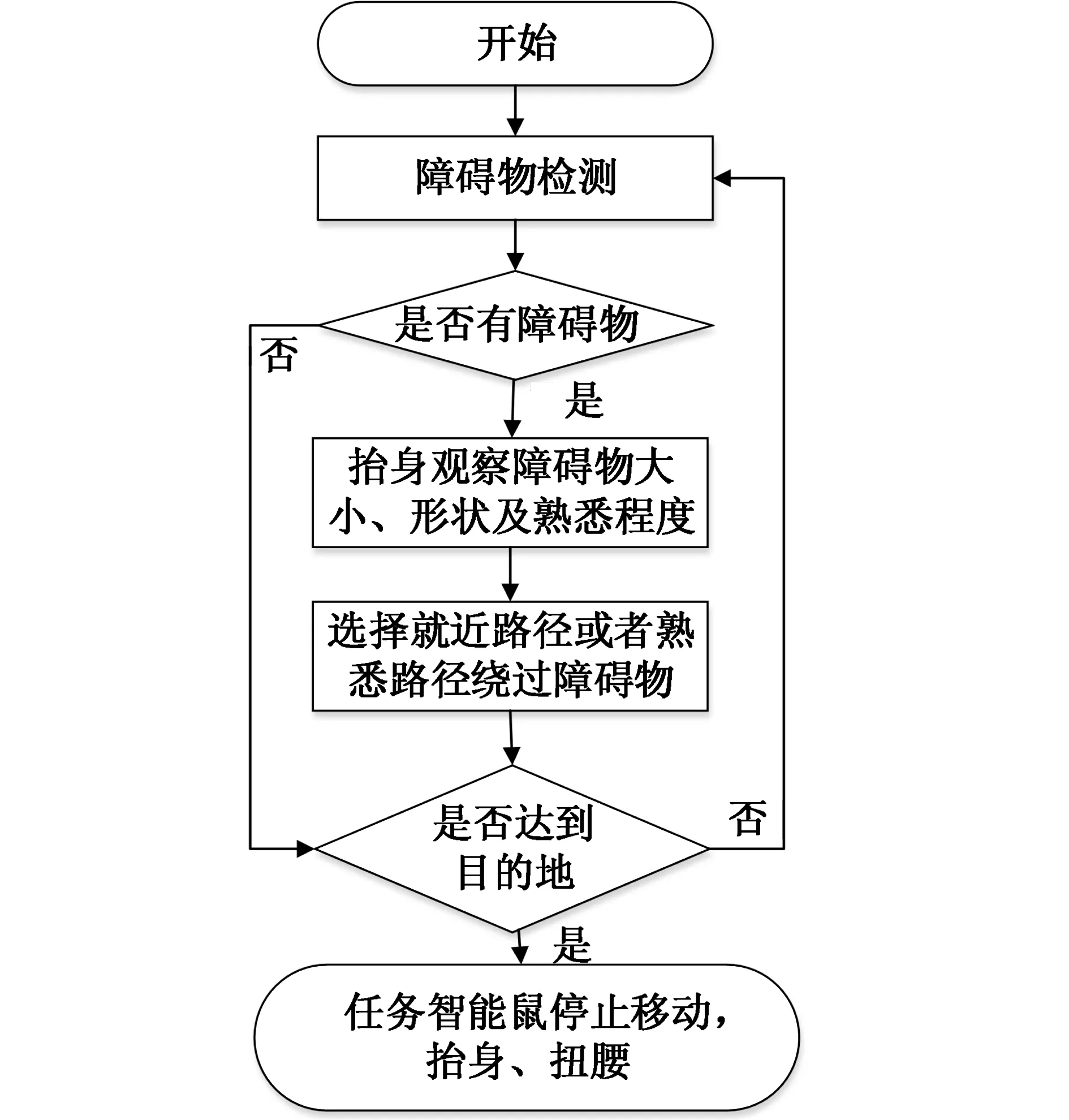
图7 智能鼠的避障策略流程图Fig.7 Obstacle avoidance strategy of the intelligent rat
2.3 智能鼠的综合运动策略
智能鼠的综合运动策略需要解决智能鼠的动态路径规划问题,本文分两种情况讨论:1)在任务智能鼠综合运动的起点,如果其与目标智能鼠之间无障碍物遮挡,那么任务智能鼠只需保持与目标智能鼠移动相同的轨迹即可完成综合运动任务;2)在任务智能鼠综合运动的起点,如果其与目标智能鼠之间有障碍物遮挡,那么任务智能鼠需要定时地抬身观察目标智能鼠的位置,以相对最优的运动路径绕过障碍物即可完成综合运动任务。
该策略的流程图如图8所示,具体综合运动过程如下:1)在综合运动过程中,任务智能鼠不断重复预处理过程(包括:目标智能鼠与障碍物的检测、目标智能鼠的特征提取以及特征点匹配),并且计算其与目标智能鼠的相对距离以及目标智能鼠的移动速度,如果任务智能鼠与目标智能鼠足够接近且目标智能鼠静止,此时,任务智能鼠完成综合运动任务;2)在综合运动过程中,如果任务智能鼠与目标智能鼠之间有障碍物遮挡,则需要根据目标智能鼠的移动速度调整任务智能鼠抬身的频率(目标智能鼠移动速度越快,任务智能鼠抬身的频率越高),并以相对最优的运动路径绕过障碍物;3)到达终点之后,任务智能鼠做出抬身、攀爬、扭腰等动作,至此综合运动任务完成。
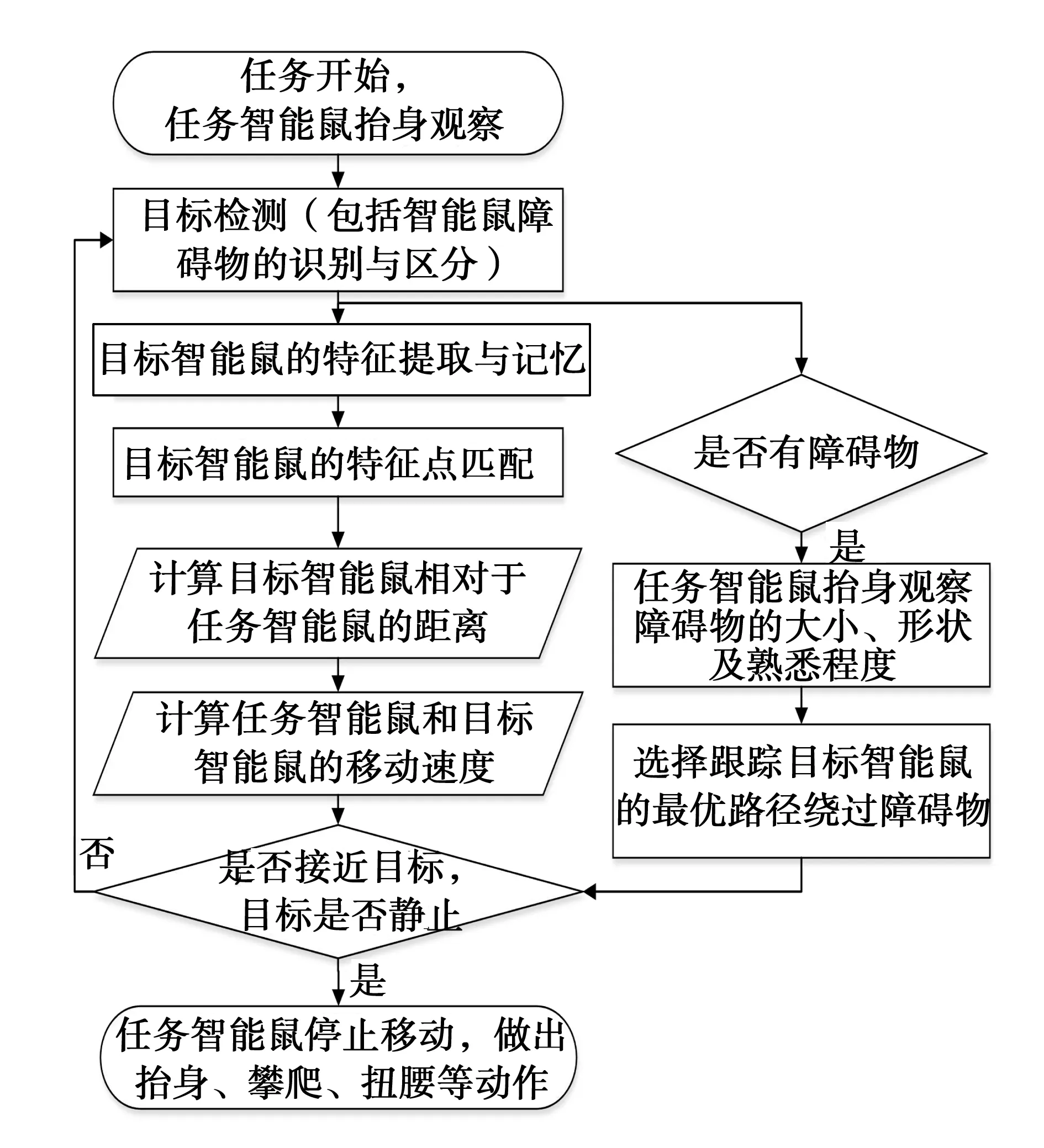
图8 智能鼠的综合运动策略流程图Fig.8 General movement strategy of the intelligent rat
上述综合运动策略中,选择相对最优的运动路径有两个可以选择的原则:a)以最优路径避开障碍物,而后跟踪目标智能鼠,b)保持跟踪目标智能鼠,同时避过障碍物。但是,考虑到目标智能鼠的移动是变化的,此时任务智能鼠如果选择原则a),在以最优路径避开障碍物之后,可能无法保持跟踪到目标智能鼠,因此,需要重新跟踪目标智能鼠,这就降低了综合运动算法的效率;同样,此时任务智能鼠如果选择原则b),虽然可以完成综合运动任务,但是避障路径却不是相对最优的路径。于是,基于仿生学的原理,本文综合以上两个原则的优点,提出一种相对最优的综合运动:综合判断目标智能鼠的运动方向以及目标智能鼠可选择的避障路径。为了更好地模仿生物鼠的思考方式,在进行综合判断时,本文赋予目标智能鼠的运动方向占比重为65%,避障路径占比重为35%。从图14中可以看出,该算法具体的实现过程如下:当任务智能鼠处于位置2时,任务智能鼠判断出目标智能鼠朝右下方移动,同时任务智能鼠距离障碍物下方更近,所以此时任务智能鼠选择从障碍物2的下方跟踪目标智能鼠;反之,若此时任务智能鼠判断出目标智能鼠朝右上方移动,此时,虽然任务智能鼠距离障碍物下方更近,但是由于目标智能鼠的运动方向在判断中所占比重更大,所以此时任务智能鼠选择从障碍物2的上方跟踪目标智能鼠。
3 实验结果
本节在智能鼠平台上进行跟踪、避障等实验来验证本文提出的跟踪与避障策略的有效性与合理性,并且将本文提出的跟踪与避障算法同基于虚拟阻抗模型的控制方法进行比较,其中,3.1~3.3节为跟踪、避障等实验的结果曲线,3.4节为智能鼠综合运动实验的实物图(注:本节算法一指的是本文提出的跟踪与避障算法,算法二指的是基于虚拟阻抗模型的控制方法)。
3.1 智能鼠的跟踪实验
该智能鼠的跟踪实验结果如图9和图10所示,关于该实验结果有以下几点说明:1)初始状态下,任务智能鼠在坐标位置(0,0)(注:本文中坐标位置的单位均为cm)处,目标智能鼠在坐标位置(10,20)处;2)开始跟踪时由于任务智能鼠与目标智能鼠距离较远,所以任务智能鼠会以较快的速度,朝向目标智能鼠移动;3)采用算法一时,当目标智能鼠通过扭腰来改变移动方向或者目标智能鼠发生位姿突变时(图9中的1,2,3处),任务智能鼠需要计算目标智能鼠的扭转角度,所以此时跟踪误差会大一些,待任务智能鼠调整完成之后,跟踪误差会逐渐减小;4)图9和图10中,比较算法一和算法二的实验结果可以看出,由于没有视觉反馈,算法二的跟踪误差波动(变化)要比算法一大。
3.2 智能鼠的避障实验
该智能鼠的避障实验结果如图11所示。关于该实验结果有以下几点说明:1)避障实验起点设在坐标位置(10,30)处,终点设在坐标位置(60,50)处;2)采用算法一时,该智能鼠在避障的“学习”过程中共走过5条轨迹,通过计算Q的值得出最优避障路径为避障路径2;3)采用算法一时,在确定了最优避障路径之后,智能鼠“记忆”该路径,从而该智能鼠可以以最优路径完成避障任务;4)比较算法一和算法二的实验结果可以看出,尽管智能鼠采用算法二时可以完成避障任务,但是由于没有引入“学习”机制,智能鼠无法获得最优避障路径。
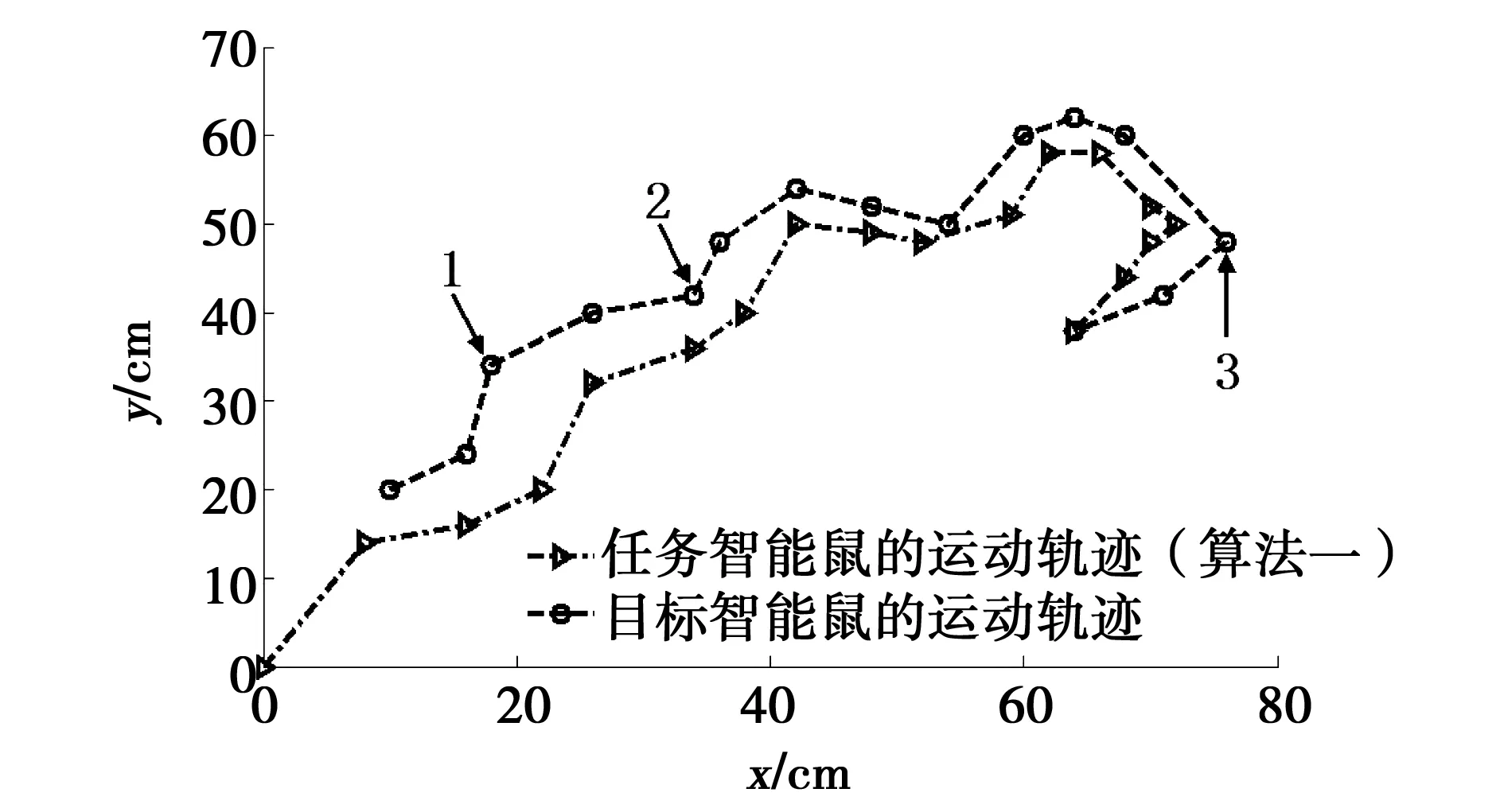
图9 智能鼠的跟踪实验结果(算法一)Fig.9 Tracking result of the intelligent rat(algorithm 1)
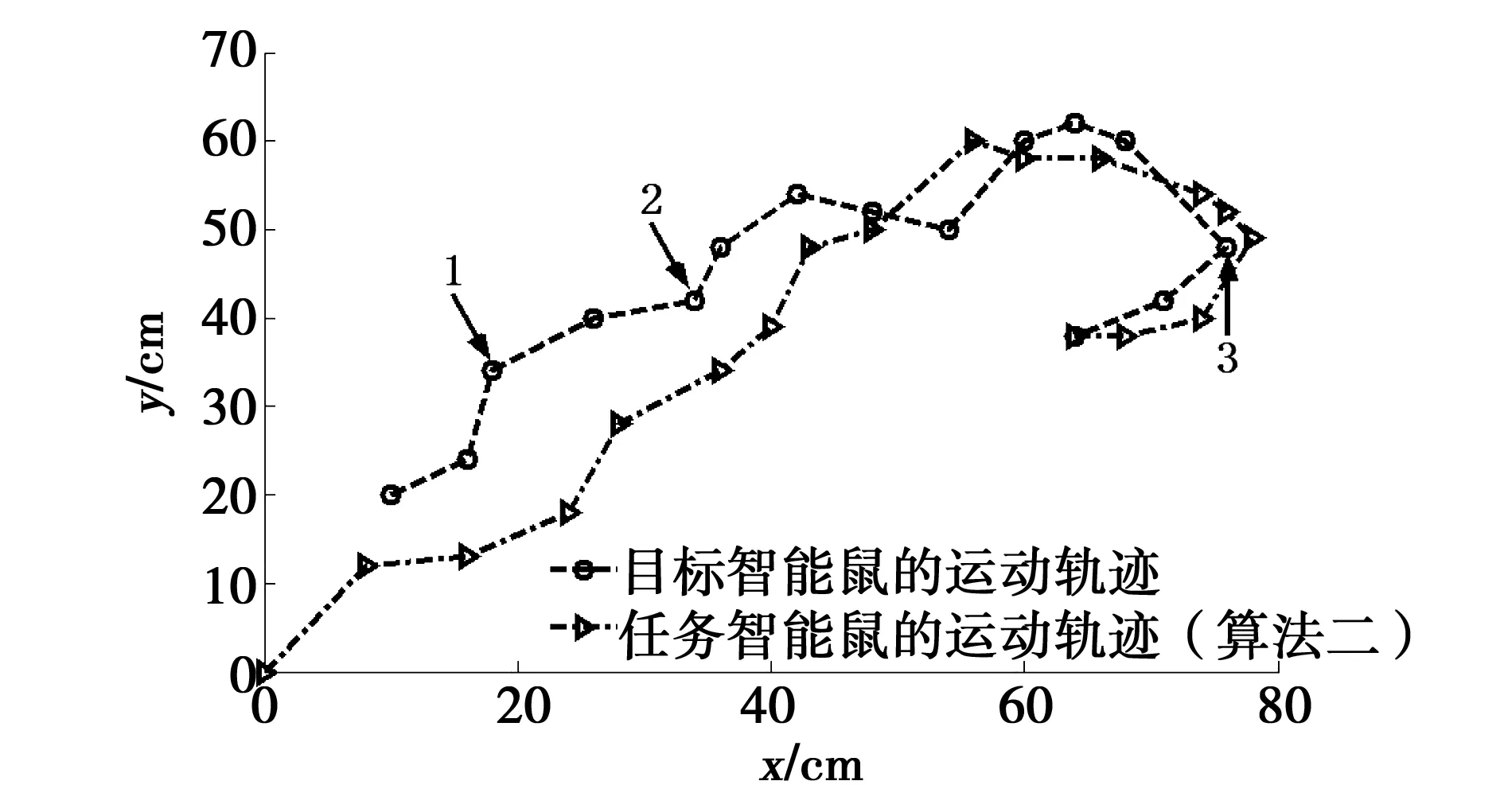
图10 智能鼠的跟踪实验结果(算法二)Fig.10 Tracking result of the intelligent rat (algorithm 2)
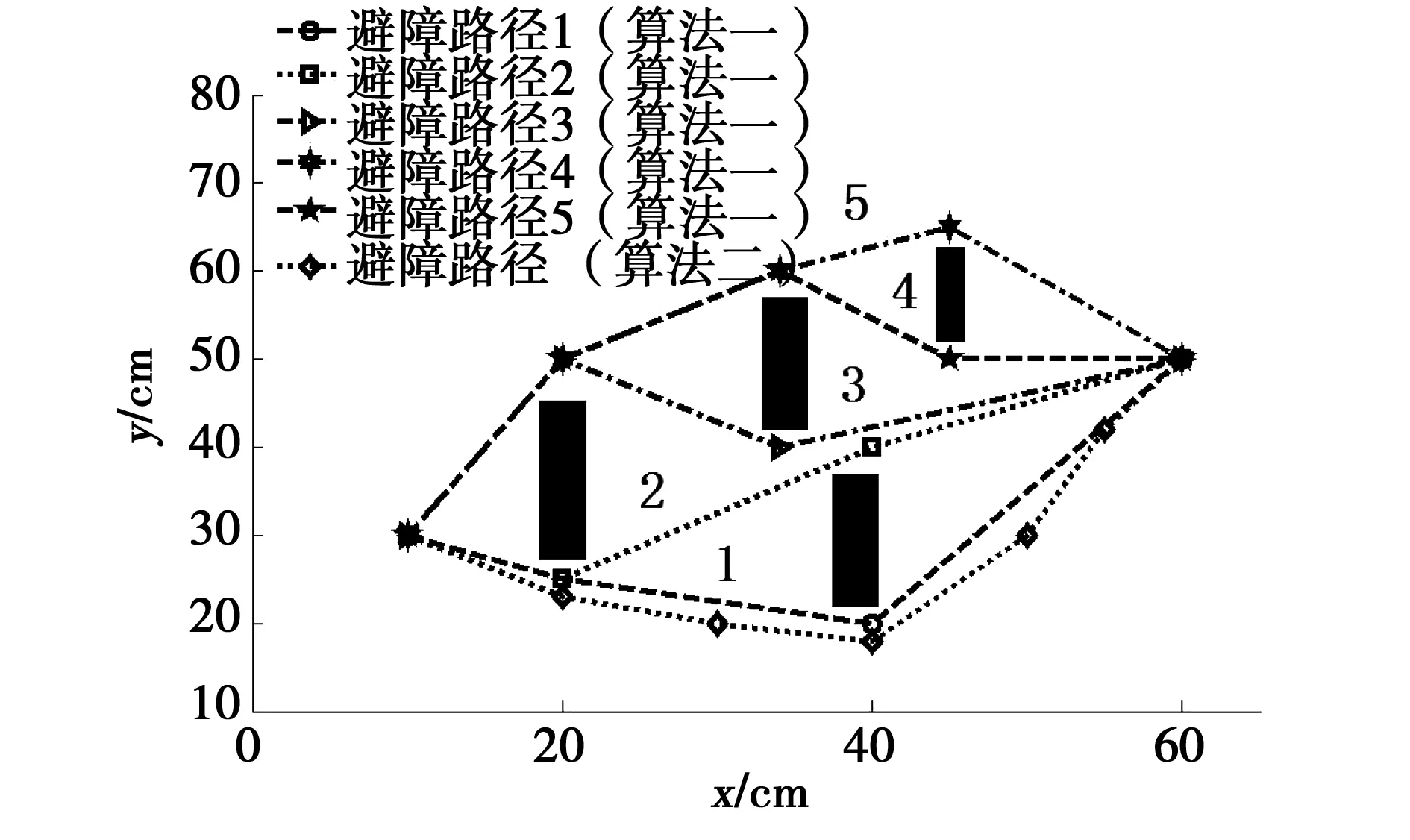
图11 智能鼠的避障实验结果Fig.11 Obstacle avoidance result of the intelligent rat
3.3 智能鼠的综合运动实验
根据初始状态下两个智能鼠之间有无障碍物的遮挡,该智能鼠的综合运动实验分为两种情况(有障碍物遮挡、无障碍物遮挡),实验结果分别如图12~图15所示。
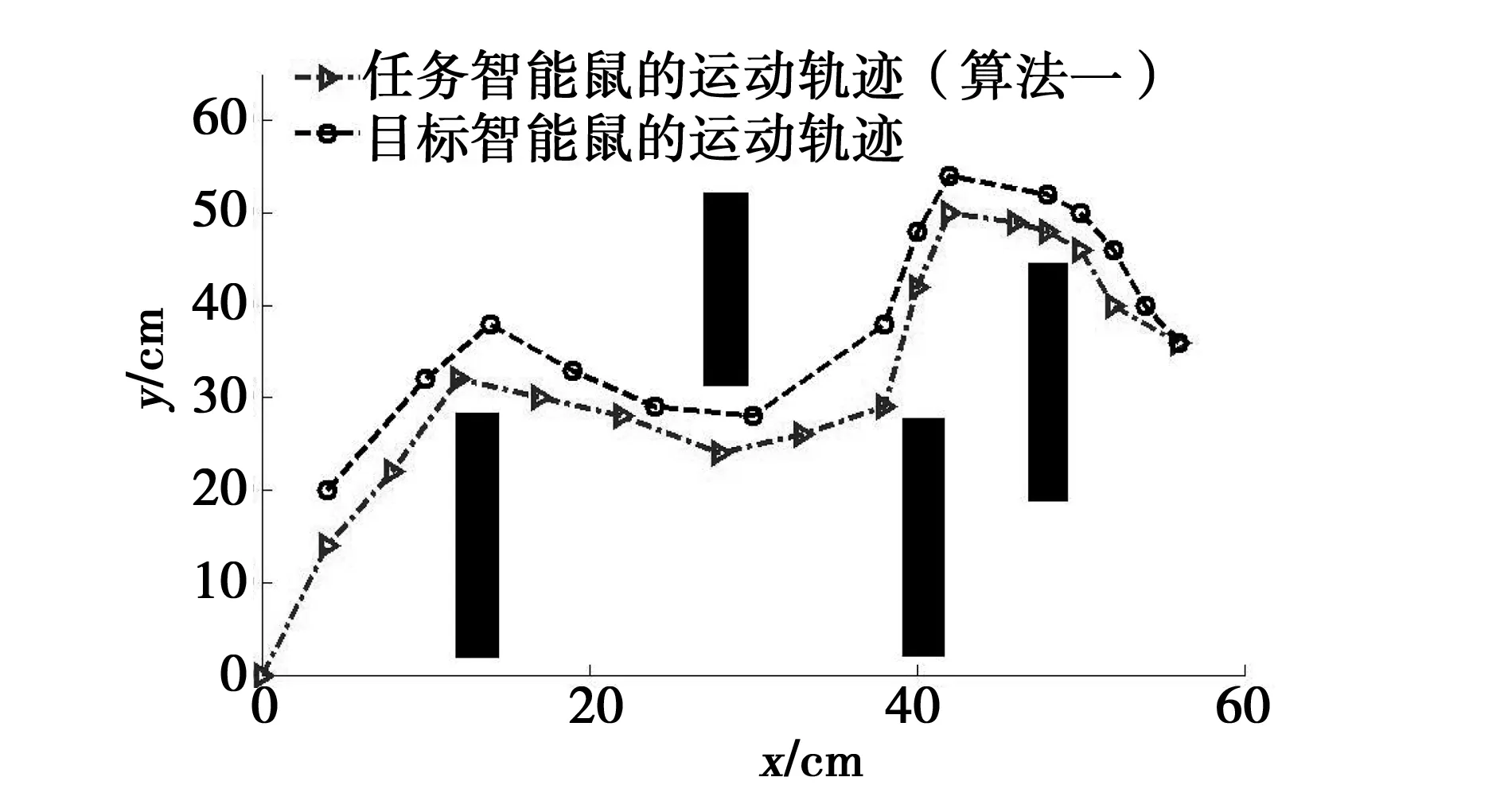
图12 智能鼠的综合运动实验结果(情形一,算法一)Fig.12 General movement result of the intelligent rat (situation 1, algorithm 1)
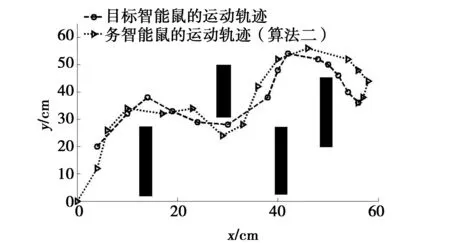
图13 智能鼠的综合运动实验结果(情形一,算法二)Fig.13 General movement result of the intelligent rat (situation 1, algorithm 2)
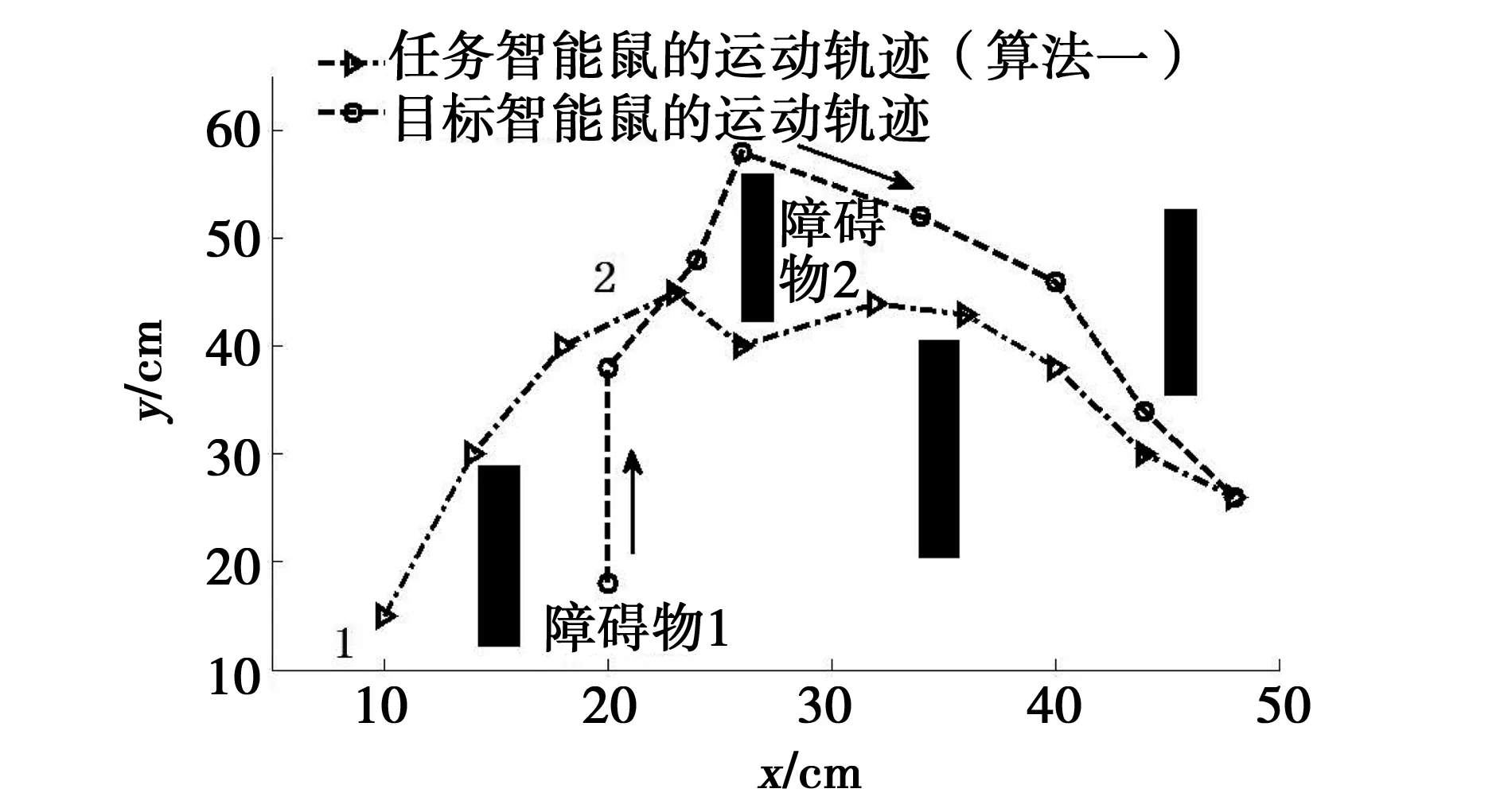
图14 智能鼠的综合运动实验结果(情形二,算法一)Fig.14 General movement result of the intelligent rat (situation 2, algorithm 1)
关于该实验结果有以下几点说明:1)图12和图13中,任务智能鼠只需要保持跟踪目标智能鼠即可完成综合运动任务;2)图14中,当任务智能鼠处于位置1时,虽然任务智能鼠从障碍物1下方跟踪目标智能鼠的路径最优,但是此时任务智能鼠判断出目标智能鼠朝y轴正方向移动,所以根据局部最优策略,任务智能鼠将从障碍物1的上方跟踪目标智能鼠;3)图14中,当任务智能鼠处于位置2时,任务智能鼠判断出目标智能鼠朝右下方移动,同时任务智能鼠从障碍物2的下方避障路径最优,所以此时任务智能鼠将从障碍物2的下方跟踪目标智能鼠;4)图12和图13中,比较算法一和算法二的实验结果可以看出,尽管采用算法二时智能鼠可以完成综合运动任务,但是由于没有引入视觉反馈以及生物鼠大脑的判断机制,算法二的跟踪误差波动(变化)要比算法一大;5)图14和图15中,比较算法一和算法二的实验结果可以看出,尽管采用算法二时智能鼠可以完成综合运动任务,但是由于没有引入生物鼠大脑的判断机制,任务智能鼠无法通过判断目标智能鼠的移动方向来调整自身的运动姿态。
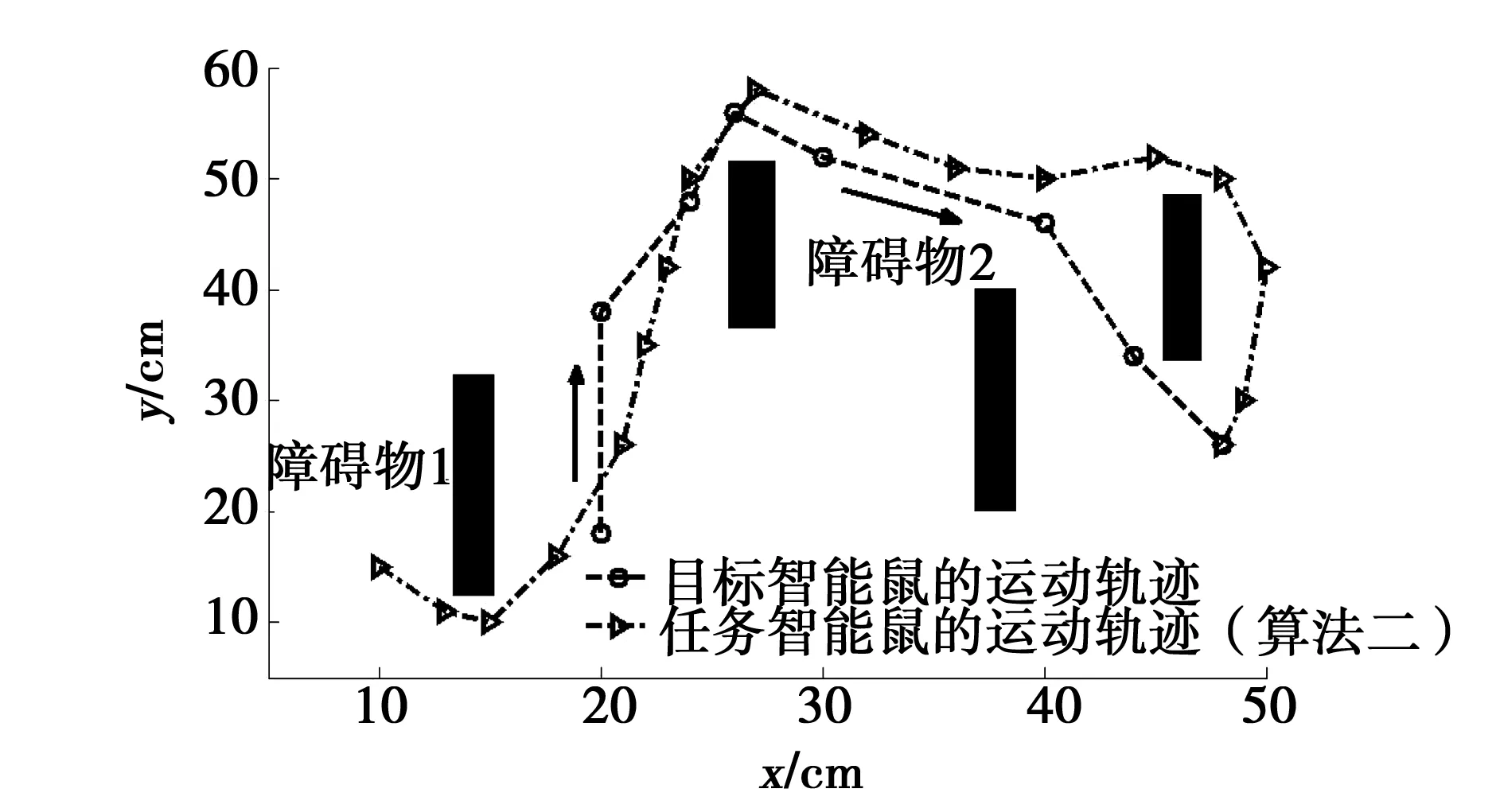
图15 智能鼠的综合运动实验结果(情形二,算法二)Fig.15 General movement result of the intelligent rat (situation 2, algorithm 2)
3.4 智能鼠综合运动实验的实物图
本小节给出智能鼠采用算法一时,在实际实验环境中综合运动的实验结果,如下图16~图21所示(注:图17~图21中用箭头表示智能鼠大致的运动方向),说明如下:图16为智能鼠综合运动的实验环境,包括智能鼠、障碍物等;图17~图21为智能鼠综合运动过程的各个阶段。另外需要说明的是在智能鼠综合运动的起点、终点以及运动过程中任务智能鼠会定时地抬身观察目标智能鼠的位置。
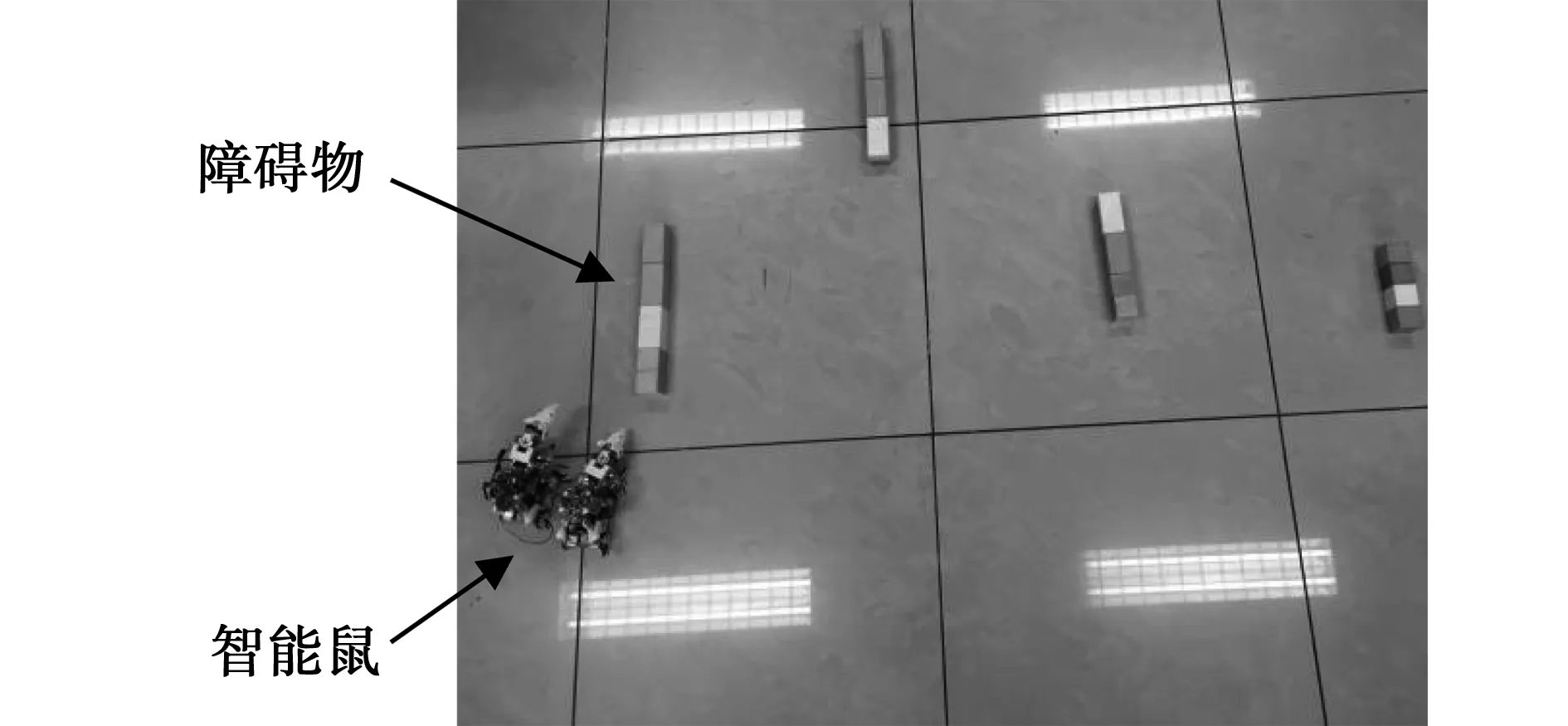
图16 综合运动实验环境Fig.16 Experimental environment of the general movement
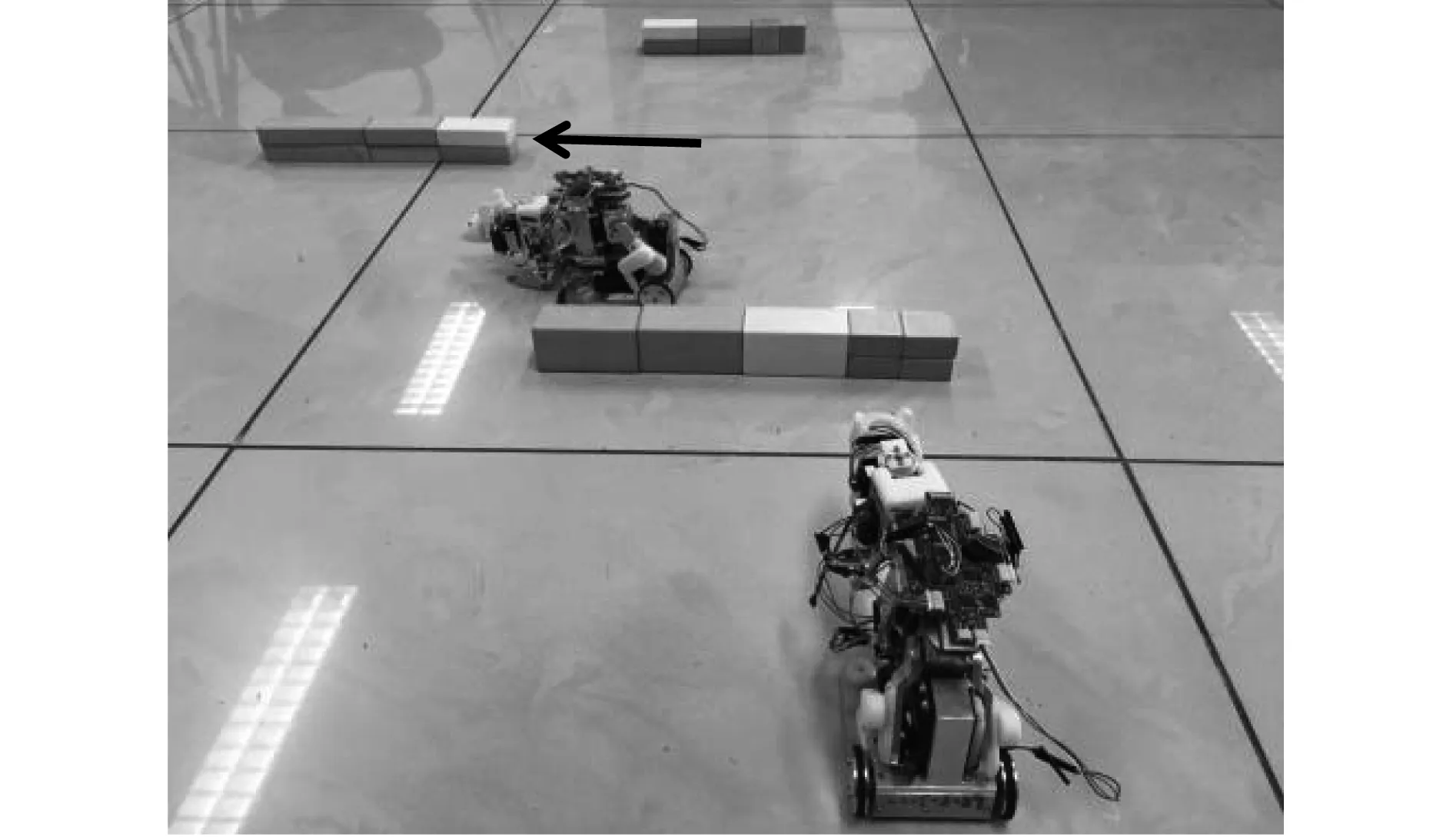
图17 综合运动开始Fig.17 Starting point of the general movement

图18 综合运动阶段1Fig.18 Phase 1 of the general movement
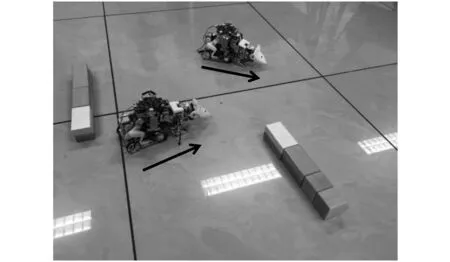
图19 综合运动阶段2Fig.19 Phase 2 of the general movement
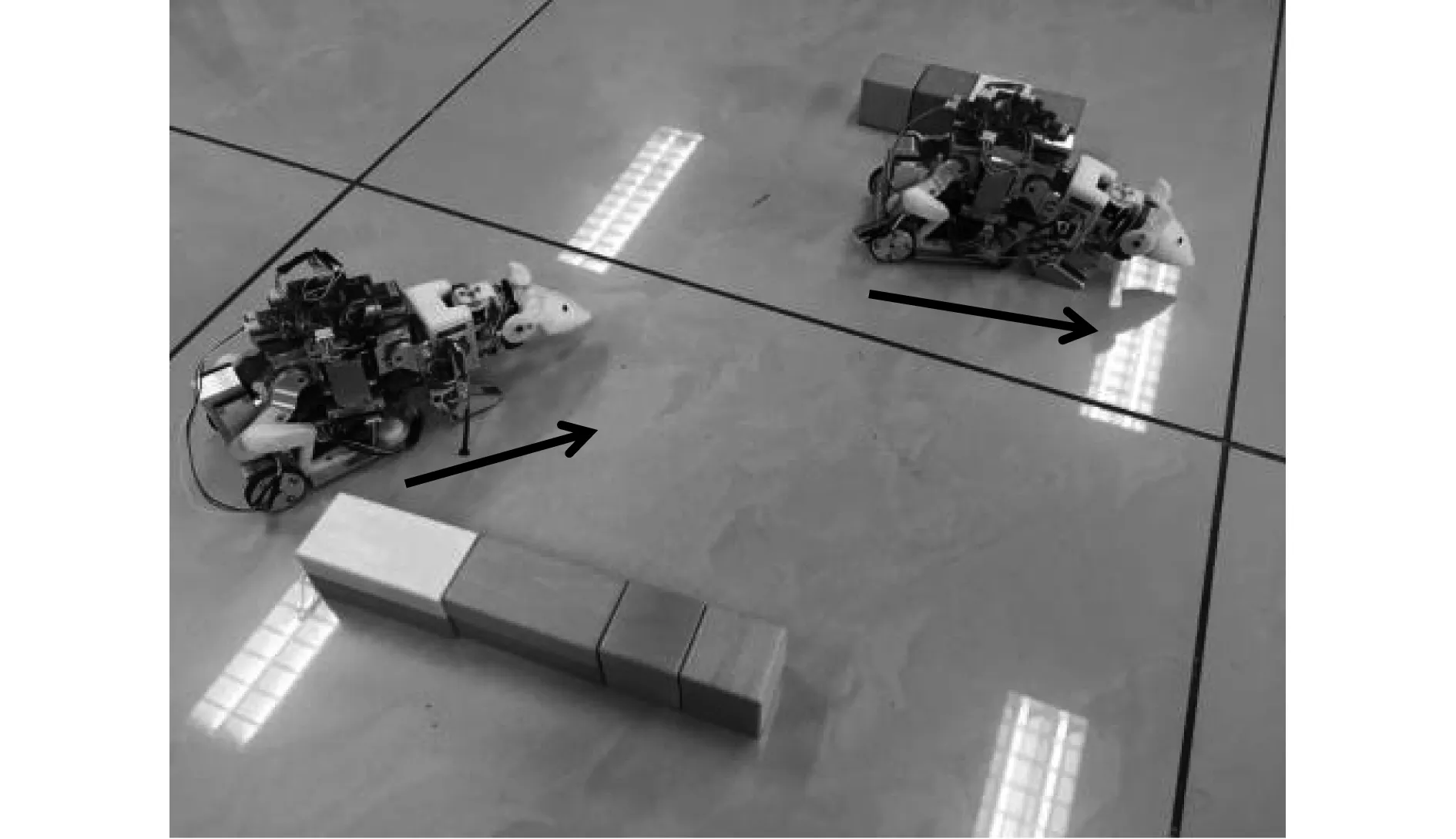
图20 综合运动阶段3Fig.20 Phase 3 of the general movement
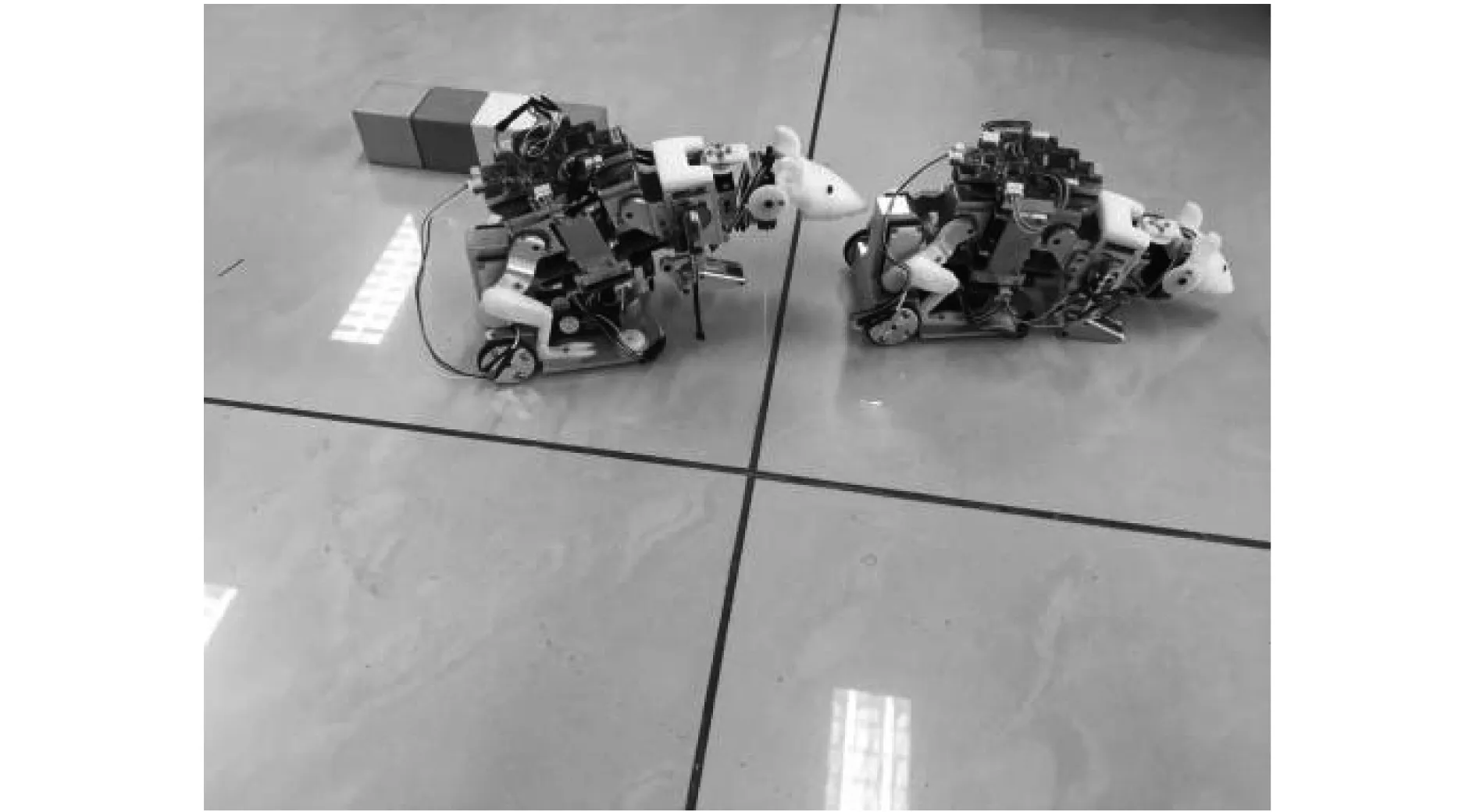
图21 综合运动结束Fig.21 Ending point of the general movement
4 结 论
本文提出一种基于仿生学的智能鼠的跟踪与避障策略:采用双目视觉系统模仿生物鼠的眼睛,同时引入生物鼠的“学习”、“记忆”与“判断”等机制。通过实验结果曲线可以看出,相比与基于虚拟阻抗模型的控制方法,本文提出的跟踪与避障算法的跟踪、避障以及综合运动的性能更好。
关于智能鼠硬件及其运动策略的研究,在后续的研究中可以考虑如下几个方面:1)为了使得智能鼠在外表上更加接近生物鼠,需要给智能机器鼠加上一层皮肤(可以是人造皮肤或者是经过处理的生物鼠皮肤);2)由于生物鼠对于周围环境的感知很多都是通过其胡须以及嗅觉完成的,所以可以给智能鼠加入胡须和嗅觉传感器来模仿生物鼠的环境感知能力[12];3)研究多智能鼠的协同与控制[13]同样具有重要的意义。
[1] JACKSON H F, BROADHURST P L. The effects of para chlorophenylalanine and stimulus intensity on open-field test measures in rats [J]. Neuropharmacology,1982, 21(12):1279-1282.
[2] FILE S E, SETH P. A review of 25 years of the social interaction test [J]. European Journal of Pharmacology, 2003, 463(1-3):35-53.
[3] BRANCHI I, BICHLER Z, BERGER SWEENEY J, et al. Animal models of mental retardation: from gene to cognitive function [J]. Neuroscience & Biobehavioral Reviews, 2003, 27(1-2):141-153.
[4] WEBB B. Bio-robotics: Methods and Applications [J].Industrial Robot, 2002, 29(3).
[5] SHI Q, ISHII H, SUGAHARA Y, et al. Design and control of a biomimetic robotic rat for interaction with laboratory rats[J]. IEEE/ASME Transactions on Mechatronics, 2014:1832-1842.
[6] 罗翔, 颜景平. 冗余度机器人的非接触阻抗控制[J]. 制造业自动化, 2003,25(9):19-22. LUO Xiang, YAN Jingping. Noncontact impedance control of redundant robots[J].Manufacturing Automation,2003, 25(9):19-22.
[7] 胡天翔,郑加强,周宏平等.基于双目视觉的树木图像测距方法[J].农业机械学报, 2010, 41(11):158-162. HU Tianxiang, ZHENG Jiaqiang, ZHOU Hongping. Measurement method of depth information of tree images based on binocular vision[J]. Transactions of the Chinese Society for Agr-icultural Machinery,2010, 41(11):158-162.
[8] ZHANG Z. Flexible camera calibration by viewing A plane from unknown orientations [C]//The Proceedings of the Seventh IEEE International Conference on Computer Vision. IEEE, 1999:666.
[9] BOREL B. Spicy rat breath reveals memory secrets [J]. Discover, 2011.
[10] SCHWARTZ S. Body & brain:Boosting estrogen, only in the brain: Selective hormone treatment might minimize adverse effects [J]. Science News, 2015, 188(4):8.
[11] WATKINS C J C H, DAYAN P. Technical note: Q-learning[J]. Machine Learning, 1992, 8(3-4):279-292.
[12] WU C, CHEN P, YU H, et al. A novel bio-mimetic olfactory-based biosensor for single olfactory sensory neuron monitoring [J]. Biosensors & Bioelectronics, 2009, 24(5):1498.
[13] 张芳, 林良明. 多移动机器人协调系统体系结构与相关问题[J]. 机器人, 2001, 23(6):554-558. ZHANG Fang, LIN Liangming. Architecture and related problens concerning cooperative mobile robot system[J]. Robot, 2001,23(6):554-558.
(编辑:贾志超)
Tracking and obstacle avoidance strategy for a bionic robot-rat
MAN Chun-tao1, CAO Miao1,2, CAO Yong-cheng3, SONG Yong-bo2
(1. School of Electric and Engineering, Harbin University of Science and Technology, Harbin 150080, China; 2.Key Laboratory of Complex System and Intelligence Science, Institute of Automation, China Academy of Sciences,Beijing 100190, China; 3.Computer & Electrical Engineering Department, Heilongjiang East College, Harbin 150086, China)
This strategy mainly focuses on the motion planning problems such as tracking and obstacle avoidance method for bionic intelligent rat platform. According to the binocular vision system and multiple degrees of freedom of the mechanical structure, the dynamic model of the bionic intelligent rat (twisting waist, rising body, and climbing etc.)was based on the characteristics of driving motors. By using the method of remembering the feature of the target intelligent rat, learning the optimal obstacle avoidance path, inferring the movement direction of the target rat, the bionic intelligent rat can track the target rat and avoid the obstacle. Accordingly, this strategy proposed a tracking and obstacle avoidance method that is based on the principle of bionics. A new kind of bionic intelligent rat is used for the motion experiments. The results demonstrate that compared with the virtual impedance model, the proposed motion algorithms can realize tracking and obstacle avoidance of the intelligent rat, and thus show the feasibility and validity of the proposed algorithms.
robotics; bionic intelligent rat; bionics; binocular vision system; motion planning
2016-05-23
黑龙江省教育厅科学技术学研究项目(12521092)
满春涛(1965—),男,博士,教授,研究方向为工业过程稳态优化控制; 曹 淼(1992—),男,硕士研究生,研究方向为机器人控制; 曹永成(1972—),男,博士,讲师,研究方向为人工智能与优化控制; 宋永博(1989—),男,硕士,助理工程师,研究方向为机器人控制。
宋永博
10.15938/j.emc.2017.06.014
TP 13
A
1007-449X(2017)06-0104-09
