基于三维激光扫描技术的塔型构筑物倾斜监测
2017-07-05艾卫涛乔德京苏旭锋
辛 星,艾卫涛,乔德京,苏旭锋
(1.北京工业职业技术学院,北京 100042;2.西安科技大学 测绘学院,陕西 西安 710054;3.江西核工业二六八测绘院,浙江 宁波 315800)
基于三维激光扫描技术的塔型构筑物倾斜监测
辛 星1,艾卫涛2,乔德京2,苏旭锋3
(1.北京工业职业技术学院,北京 100042;2.西安科技大学 测绘学院,陕西 西安 710054;3.江西核工业二六八测绘院,浙江 宁波 315800)
为提高塔型构筑物的倾斜测量效率,提出了一种基于三维激光扫描技术的塔形构筑物倾斜变形监测方法。首先详细阐述了利用点云进行倾斜变形信息提取及扫描点位精度分析的方法;然后利用逆向工程软件(Imageware)对采集的点云进行重构,并提取构筑物轴线坐标,进而计算得到构筑物的倾斜值;最后通过全站仪前方交会精度比较实验验证了三维激光扫描技术在塔型构筑物倾斜监测中应用的可靠性。结果表明,运用三维激光扫描技术进行塔型构筑物倾斜监测的结果与传统全站仪前方交会方法测定的结果吻合,该技术在塔型构筑物倾斜监测中具有较高的实用价值。
三维激光扫描;塔型构筑物;倾斜监测

随着我国现代化建设进程的不断加快,水塔、烟囱等高耸塔型构筑物大量出现,其稳定性和可靠性已成为人们关注的焦点。倾斜度是衡量施工技术质量的重要指标之一,倾斜即建筑物顶部与底部中心不在一 条垂直线上,倾斜率即顶底中心水平投影距与建筑物高度之比[1]。如何快速、准确地测量构筑物的倾斜度一直都是变形观测领域的研究热点。
高耸塔型构筑物在工程施工和竣工使用期间,存在受基础和结构本身的变形以及在日照下因受热不均匀影响而产生的弯曲变形,其综合表现为整个建筑体的倾斜变形[2]。国内对高耸塔型构筑物的变形监测研究从未停止,如彭伟平[3]从测量实践角度发现了前方交会方法的不足,找到了新的测量方法——大角前方交会法;黄仲平[4]利用激光技术进行变形监测,实践证明该方法精度高,观测速度快,与用光学经纬仪以交会法观测或用经纬仪以垂直标尺法投影观测相比,可提高数倍工效;刘凡[5]将无棱镜全站仪应用于烟囱倾斜观测;闾海庆[6]等利用近景摄影测量方法,通过与传统的测量方法的比较,验证了摄影测量在烟囱的快速检测中应用的可行性。这些技术虽有较高精度,但测量方案复杂,需有一定经验的人员进行操作。三维激光扫描技术集成了多种高新技术的新型空间信息数据获取手段与工具[7],能够克服传统测量技术的局限性;是一种以激光测距方式快速获取目标大量三维坐标的测量技术,能够准确掌握被测目标的三维形态和空间位置,已被广泛应用于变形监测、地形测量、工程测量等领域[8]。
1 基于点云的倾斜变形信息提取及精度分析
1.1 倾斜变形信息提取
基于三维激光扫描进行塔型构筑物倾斜变形监测的关键是如何提取构筑物的变形信息。本文提出了基于中轴线上节点坐标偏移的方法,其思路为对构筑物整体或局部进行扫描,通过与传统测量方法进行对比,分析其测量精度。为了准确提取中轴线上节点的坐标[9],首先对目标物点云进行配准、去噪等预处理,然后对点云进行横断面切片,再用局部曲面拟合的方法提取每个切片点云的中心,最后由各横断面中心计算目标物的倾斜值(图1)。

图1 倾斜信息的提取流程图
1.2 点位精度分析
由三维激光扫描原理(图2)可知,三维激光扫描仪点云坐标计算公式为:
X = Scosθcosα Y = Scosθsinα Z = Ssinθ(1)由误差传播定律可知:



式中,ms为扫描仪测距精度;mα为水平角测角精度;mβ为垂直角测角精度;s为仪器到点云的斜距;α、β分别为仪器水平和垂直扫描角;ρ=206 265。

图2 三维激光扫描原理
2 两种方法在塔型构筑物倾斜测量中的精度比较实验
2.1 实验目的
为了测试三维激光扫描技术在塔型构筑物倾斜变形测量中的精度与可靠性,本文分别采用激光扫描仪与全站仪对同一塔型构筑物进行倾斜变形测量,再比较二者的精度。全站仪是传统的变形监测技术,其测量精度可作为基准参考。
2.2 实验过程及结果
本次实验采用Leica ScanStation C10激光扫描仪与Leica TC1610全站仪,厂家标称精度见表1。以陕西某矿区东北部居民生活及消防供水塔(图3)为观测对象,该塔塔高33.8 m,塔身为圆柱形,水塔结构分为筒体和储水池两部分。其中筒体高29.8 m,砖混结构,外径为10 m;储水池高4 m,砖混结构,外径为11.2 m。煤矿开采引起地表沉降,从而导致建、构筑物等发生变形,影响居民安全生产和生活[10]。由于该供水塔地处采面采动影响边界线内侧,难免受采动影响而发生倾斜,因此对其进行监测能为水塔的安全运营及维修加固,提供准确及时的数据资料。

图3 扫描现场

表1 厂家标定仪器精度
2.2.1 基于全站仪的塔型构筑物倾斜监测
依据现场情况,水塔塔体倾斜监测采用前方交会法[11]。在水塔附近大致垂直的两个方向上设置2个观测基点K1(0,0,0)和K2(323.133,157.602,1.283),K1、K2坐标方位角为26°0'0",在塔体33 m、30 m、25 m、20 m、15 m、10 m、5 m和2.4 m处分别布设高度点F1、F2、F3、F4、F5、F6、F7、F8,依据方向观测法分别观测水塔外壁左右两侧等高度位置[12]方向值,据此计算交会角(A、B),按前方交会法公式计算4个高度处水塔中心坐标(见表2),再依据不同高度处塔心坐标变换确定水塔倾斜度,测量原理如图4所示。

图4 前方交会测量原理

2.2.2 基于三维激光扫描技术的塔型构筑物倾斜监测
将采集的数据导入Leica公司开发的Cyclone点云处理软件,自带软件只能对数据进行一般处理,而水塔、烟囱等是特殊设计的构筑物,处理起来相对困难,因此选择第三方厂家提供的Imageware软件(图5)。

图5 水塔点云示意图
1)激光点云生成。将扫描数据导入Cyclone软件,自动生成点云。
2)选择目标数据区域。在进行扫描时,视场选择为全景扫描,因此将大量无关点也扫入其中,大大增加了点的数量。为了减少数据运算量,利用Imageware软件粗略去掉一定范围内不相关的点,然后识别标靶球并进行配准与拼接。
3)冗余数据处理。利用Imageware软件将水塔周围的噪声去掉,只留水塔的扫描点;再进行采样,减少点云密度。
4)多边形化点云。
5)按照一定高度分割模型体,并把每一段模型进行拟合,查询每段的中心坐标[13],见表2。
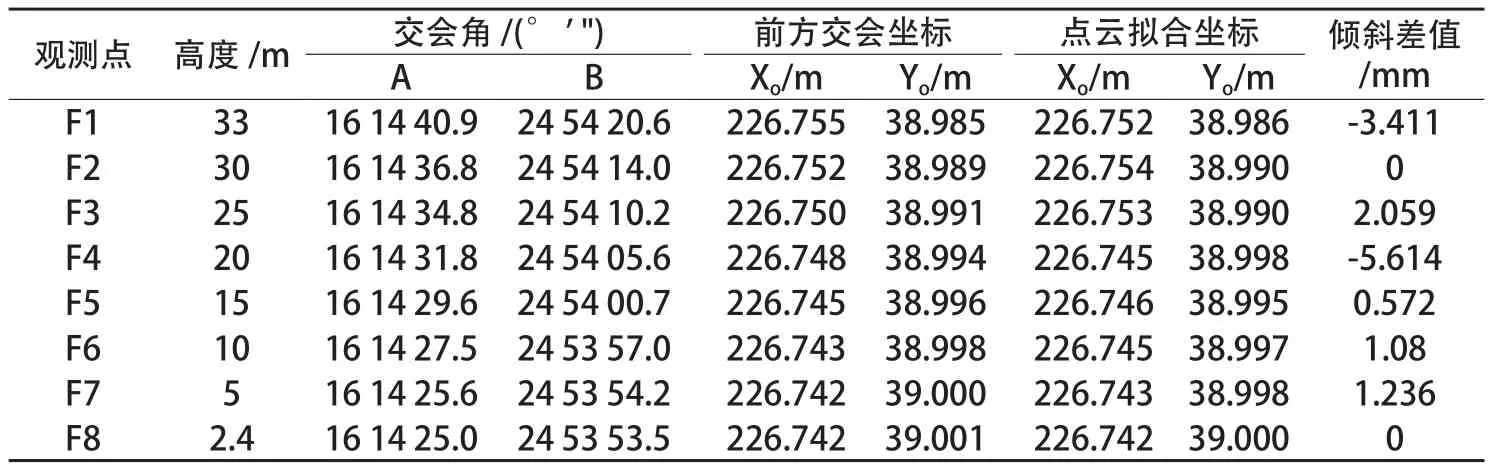
表2 前方交会与点云拟合坐标数据
由表2可见,三维激光扫描仪单个测点的误差比全站仪要大,经过拟合得到水塔相对变形与全站仪基本一致,二者结果相差在6 mm以内。Gordon S J和Lichti D D[14]的实验表明对点云进行拟合能得到优于单点精度的测量结果,本文结论与之一致。用两 种方法获取的水塔倾斜值差值进行计算,可得均值为-0.509 8 mm,标准差为±2.458 0 mm。
2.3 精度评定
对于三维激光拟合得到的倾斜值与全站仪所测倾斜值结果是否一致的问题,采用μ检验法进行假设检验。提出假设H0:三维激光拟合得到的倾斜值与全站仪所测倾斜值结果是一致的。已知两种方法获取的倾斜值的差值平均值μ=-0.509 8 mm,标准差σ=±2.458 0 mm,计算可得:

3 结 语
本文研究了基于三维激光扫描技术的塔型构筑物倾斜变形监测方法,主要结论为:
1)通过与高精度全站仪进行对比分析可知,运用三维激光扫描技术测得的水塔倾斜值符合精度要求,且发现该方法在现场实施过程中,操作更加简便,可有效避免传统测量方法在塔型构筑物倾斜监测中需要查找切点、等高点等问题,提高了测量效率,特别是对于所处位置复杂以及处于危险状态的塔型构筑物具有很大优势。
2)三维激光技术不仅可以得到高精度的单点坐标,而且可以较好地反映整个监测目标的表面三维特征,还可以利用相关建模软件得到目标的真实空间姿态;通过对空间姿态进行对比分析,能较好地观测目标的整体变形情况,避免了传统监测技术所带来的局限性。
[1] 丁安民,段敬民,吴海帆.多高层建筑物沉降及倾斜观测[J].煤炭工程,2004(9):12-14
[2] 严伯铎.高耸塔型建(构)筑物的倾斜与动态变形监测[J].工程勘察,2009(8):56-58,63
[3] 彭伟平.前方交会法在烟囱倾斜变形观测中的优化设计研究及其应用[J].勘察科学技术,2004(2):48-52
[4] 黄仲平.激光技术在多层建(构)筑物倾斜变形观测中的应用[J].激光杂志,1984(4):240-242
[5] 刘凡.无棱镜全站仪测量技术在烟囱倾斜观测中的应用[J].沿海企业与科技,2009(10):129-131
[6] 闾海庆,康鑫,雷远华,等.摄影全站仪在电厂烟囱快速监测中应用研究[J].电力勘测设计,2011(1):28-32
[7] 马立广.地面三维激光扫描仪的分类与应用[J].地理空间信息,2005,3(3):60-62
[8] 张靖,张爱能,刘国栋.三维激光扫描仪技术在地形测量中的应用[J].西安科技大学学报,2014,34(2):199-203
[9] 黄祖登,唐琨,戴鑫.基于三维激光扫描数据的隧道中轴线提取[J].地理空间信息,2014,12(4):122-123,126
[10] 赵伟颖,邓喀中,杨俊凯,等.DEM精度在DInSAR监测采空区沉降中的影响[J].煤炭工程,2015,47(3):90-92
[11] 李志伟,王欢,庞正辉,等.基于切点前方交会法的大型烟囱倾斜观测最佳方案设计[J].测绘信息与工程,2011,36(5):38-40 [12] 陈德标,江金霞,陈旭亮.三种基于免棱镜技术圆筒构筑物倾斜观测方法[J].测绘与空间地理信息,2013,36(5):83-86
[13] 孙树芳,方源敏.三维激光扫描技术的数据处理及误差分析[J].科技创新导报,2008(30):1-2
[14] Gordon S J, Lichti D D. Modeling Terrestrial Laser Scanner Data for Precise Structural Deformation Measurement[J].Journal of Surveying Engineering,2007,133(2):72-80
P258
B
1672-4623(2017)05-0045-03
10.3969/j.issn.1672-4623.2017.0051.4
辛星,硕士,讲师,研究方向为矿山测绘与变形监测。
2016-06-07。
项目来源:国家自然科学基金资助项目(41272388);陕西省自然科学基础研究计划-面上项目资助(2016JM5048)。
