模架无线实时变形监测系统的设计与精度标定
2017-07-05李长青崔有祯武胜林
郑 阔,李长青,崔有祯,武胜林
(北京工业职业技术学院建筑与测绘工程学院,北京 100042)
模架无线实时变形监测系统的设计与精度标定
郑 阔,李长青,崔有祯,武胜林
(北京工业职业技术学院建筑与测绘工程学院,北京 100042)
介绍了模架无线实时变形监测系统的基本构成和主要工作过程,提出了使用绝对激光跟踪仪对其核心部件位移和角度传感器进行监测精度标定,设计了模架无线实时监测传感器工作和标定试验模型,通过试验分析为传感器精度的判定和升级研发提供了有效的数据支撑。
模架;实时监测;传感器;精度标定;激光跟踪仪
近期,大跨度、重荷载、高净空的混凝土结构和钢结构建筑大量涌现,其设计也日趋复杂,模板工程在搭设、施工、使用中作业危险因素多,极易发生伤亡事故,据统计近3年发生的47起较大及以上事故案例中,模板支撑体系及脚手架坍塌事故有18起,占事故总量的38.3%,2015年模板支撑体系坍塌事故6起,死亡32人,分别占较大事故总数的27.27%和37.65%。除了技术、施工方案、管理原因外,建立起一套行之有效的模架位移变形监测及预警系统,将极大降低模架坍塌灾害的发生率且尽可能地减少人员财产损失。本文对建筑模架位移监测及预警系统组成及核心部件变形监测传感器(简称传感器)工作原理进行了分析,设计试验对其监测精度进行了标定,并在北京新机场项目中实践应用,取得了较好的效果。
1 传感器的研制
1.1 模架施工与变形监测现状
我国常用扣件式、碗扣式和盘扣式3种架体,扣件式使用广泛。扣件式架体规定:钢管规格48 mm×3.6 mm,可调托撑外径不小于36 mm,支托板厚不小于5 mm。现场随机抽取12根刚管试样试验结果为:管径基本满足要求,壁厚严重不达标的占50%,有偏差的占33%,完全达标的17%。规范对于U托的规定:外径不得小于36 mm,支托板厚不应小于5 mm。而现场调查发现:外径100%不合格;板厚全部100%不达标。钢管及U托调查数据见表1、表2。因此,鉴于现存的潜在工程质量问题,对模架进行规范的变形监测已经到了非常紧迫的阶段。
《建筑施工临时支撑结构技术规范》(JGJ 300—2013)8.0.3关于模架位移规定“监测点应设在角部和四边的中部位置”。常用的监测方法有电子经纬仪、水准仪、全站仪、红外线水准仪、激光垂直仪等。目前建筑工地在浇筑混凝土过程中,监测频率每30 min一次,终凝后的监测频率为每天一次,连续观察7天。但是,实际施工现场状况多为浇筑混凝土梁部位受力较大,主梁在建筑体内部的较多。变形情况是模架内部首先变形,而后向外扩展,内部变形是架体整体失稳的先导因素。变形破坏在短时间内结束,属于失稳破坏,不会持续半小时。
表1 模架应用现实情况——钢管
表2 模架应用现实情况——U托
因此,在使用传统的监测手段进行模架变形监测时,不能准确测量模架内部变形,也不能实现实时监测,更不能实现远程监测。尤其是杆件密集,通视性不好,无法固定支座,理论可行而实际实施时难度很大。
1.2 传感器的研制
为了解决以上问题,采用煤矿岩石位移的测试原理,使用传感器采集信号、电子模块、无线通信等手段,研发了模板支撑架变形远程实时监测系统。系统可监测内容包括模架水平位移、竖向位移、总位移和转角。监测方式为连续实时监测,曲线显示,限值报警。监测位置可通过数值计算或经验选择,一般模架内部变形量较大的部位为高支模顶部和中间部分。系统组成如图1所示。
监测系统核心部件位移监测传感器和角度传感器的监测精度如何确定是系统研制后期面临的主要问题。
2 传感器精度标定方案
由于传感器位移监测精度设计为0.1 mm,角度监测精度为0.1°,因此为了对其精度进行标定,采用观测精度更高数量级的徕卡AT402新一代绝对激光跟踪仪进行精度标定。AT402主要性能参数见表3。
标定工作过程为通过对脚手架施力,模拟脚手架在实际工作中的受力产生形变位移,在模架上选取位于角度传感器附近一监测点放置棱镜,通过AT402对监测点形变量的测量得到形变数据,在对数据进行后处理得到在施工坐标系中的形变量。以此再与由角度、位移传感器采集数据联合解算得出的监测点位移变量进行对比,由于激光跟踪仪的精度高,传感器相比激光跟踪仪精度较低,以激光跟踪仪数据为基准,对传感器数据进行标定。传感器标定工作现场如图2所示。标定步骤为:
图1 模架无线实时监测系统

图2 标定工作现场
(1) 建立试验模型,在监测点和基准点安置棱镜并固定牢固,如图1所示,在监测点安置角度传感器,下方安置位移传感器,两个传感器用钢丝轻轻拉紧并使位移传感器拉力采集器受力为0。
(2) 为各个试验点进行编号,如图1所示,其中18号点为位移监测点,19、20号点为参考点。
(3) 架设激光跟踪仪,采集首期基准三维数据(作为形变量的参考)。
(4) 在脚手架基座东南西北4个方向安置可升降螺丝,分别单独和组合调整螺丝高度,模拟脚手架受力,达到脚手架变形的目的。
(5) 跟踪仪与传感器分别采集形变后的三维数据。
(6) 数据处理及标定结论。
3 传感器精度标定数据分析
3.1 标定数据
由于传感器位于脚手架上,计算出来的坐标及方向是施工坐标,并且角度传感器使用的是欧拉坐标系,而跟踪仪采用自由设站法,默认坐标系为站心直角坐标系,因此需要进行坐标转换以进行比较。比较结果见表4—表6。
表5 竖向位移比较
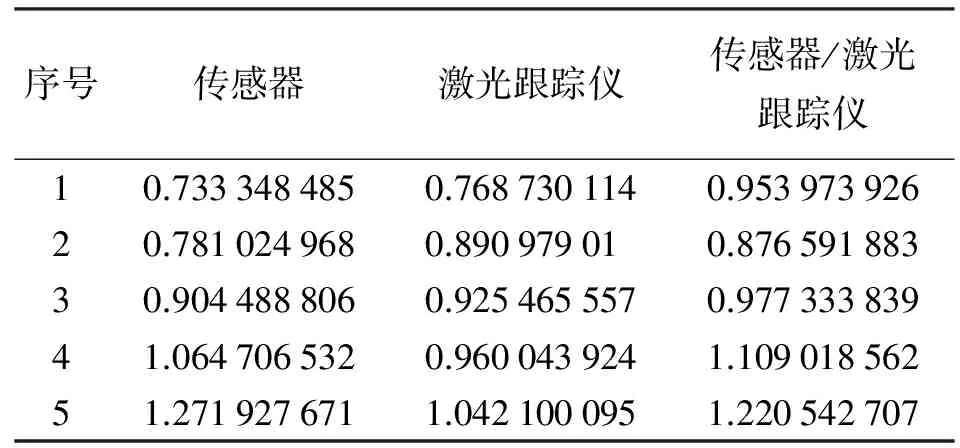
表6 空间角度比较
3.2 数据分析
通过对多期数据进行对比分析发现,传感器与跟踪仪监测值比值统计为:角度平均误差1.018%,水平位移平均误差1.024 5%,竖向位移平均误差1.014 9%,系统综合位移精度0.3 mm。统计曲线如图3—图5所示。
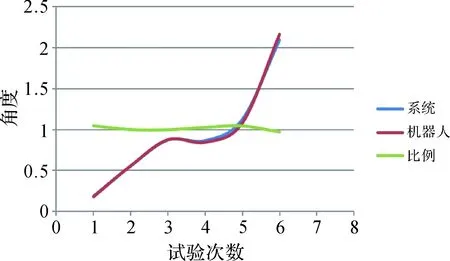
图3 空间角度监测值比较
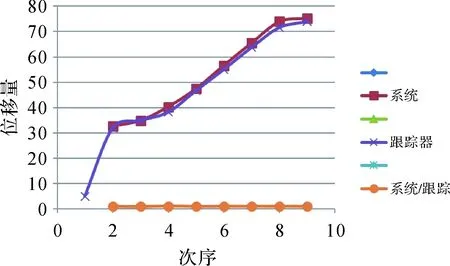
图4 水平位移监测值比较
通过统计图可以看出传感器数据与激光跟踪仪监测数据比值基本趋于稳定,由于传感器精度低,激光跟踪仪AT402精度高,因此折线统计图会出现浮动。标定工作获取了合理(即以高精度仪器校正低精度仪器)的结果,符合预期目的。
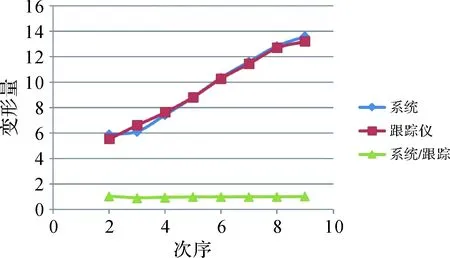
图5 竖向位移监测值比较
4 传感器应用案例
模架无线实时监测系统在北京新机场建设项目中进行了实际应用,如图6所示。待测大梁规格为270 000 mm×2200 mm×25 000 mm。模架类型为盘扣。
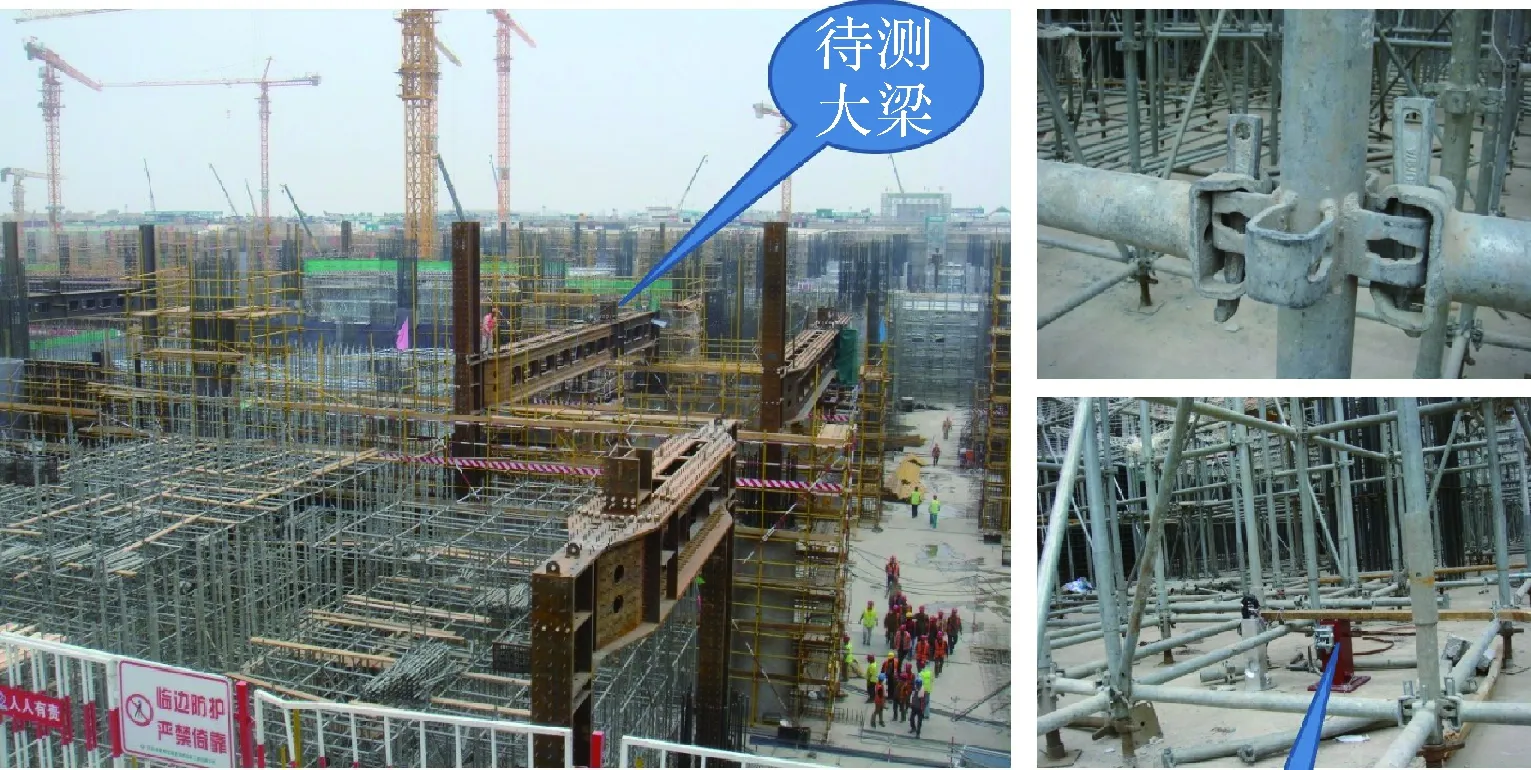
图6 北京新机场监测现场
通过监测数据和曲线图7可以看出,传感器的精度分辨率、实时性、变形规律的原因反应均获得了良好的效果。
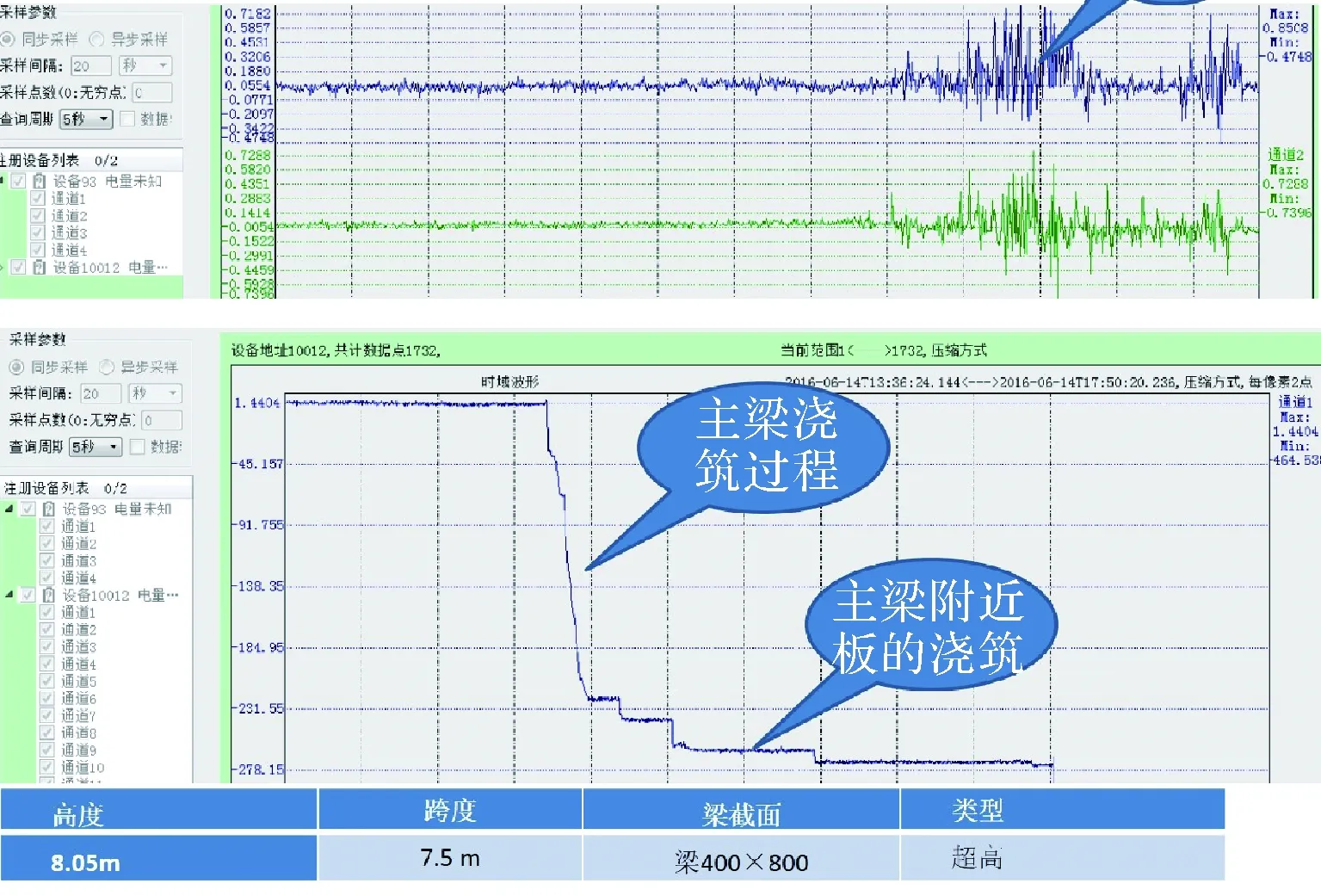
图7 北京新机场监测系统观测曲线
5 结 语
在实际项目中,由于正值北京雨季,传感器也出现了由于制造工艺原因遇雨水短路断电等现象,因此,加强传感器工业产品化质量要求是从研发走向生产的重要步骤。另外,监测系统需进一步增加功能,除了位移信息外,还需要监测模架的应力信息、压力信息等,数据传输也需要从局域无线到Internet远程传输,进一步提高系统在复杂艰苦的建筑施工环境中的工作效率和稳定性,切实减少人员的工作量,提高安全性。
传感器的监测精度理论上随着元器件的结构和设计优化可以继续提高,这对精度标定也提出了更高要求。AT402理论精度在μm量级,如何进一步优化观测的时间、距离、频率及观测棱镜的配套使用等方面挖掘其精度潜力也有待继续研究。
[1] 郑阔,李长青,崔有祯,等. 激光跟踪仪在高支模支护体系变形监测中的应用[J].测绘通报,2016(11):99-102.
[2] 安沁丽,刘金龙. 扣件式钢管模板高支撑体系现场监测[J]. 重庆建筑,2012,11(10): 45-46.
[3] 余剑锋. 门架与钢管混搭型高支模实例的受力变形分析[J]. 广东土木与建筑,2009(9):50-51.
[4] 卢松耀,梁龙昌,何广静. 基于测量机器人的高支模变形监测研究与应用[J].测绘通报,2015(7):85-88.
[5] 孟威. 某大跨度结构高支模体系的监测分析[J].安徽建筑,2013,20(5):187-188.
[6] 朵润民,苏键,韩强,等. 无线智能监测仪在高支模预压监测中的应用[J].广州建筑,2015,43(6):20-23.
[7] 于成浩,柯明,赵振堂. 提高激光跟踪仪测量精度的措施[J].测绘科学,2007,32(2):54-56.
[8] 甘霖,李晓星. 激光跟踪仪现场测量精度检测[J].北京航空航天大学学报,2009,35(5):612-614.
[9] 欧阳健飞,刘万里,闫勇刚,等. 激光跟踪仪坐标测量精度的研究[J].红外与激光工程,2008,37(S1):15-18.
[10] 何永琦,陈伟民,符玉梅. 倾斜传感器在桥梁变形监测中的应用[J].重庆大学学报(自然科学版),2004,27(7):28-31.
[11] 张学智,应义淼,章雪峰,等. 扣件式钢管模板高支撑体系现场动态检测与分析[J].施工技术,2009(S2):414-417.
[12] 徐亚明,周建国,张鹏,等. 无线传感器网络变形监测研究综述[J].测绘地理信息,2016,41(5):1-7.
This paper introduces the basic structure and the main working process of the wireless real-time deformation monitoring system for form-work, and proposes the use of an absolute laser taker with comprehensive instrument to mold the core components of displacement and angle sensor to monitor the accuracy of calibration, and designs wireless real-time monitoring sensors and calibration work in experimental models. Experimental analysis provides effective data support for the determination of sensor precision and the development of R & D.
form-work; real-time monitoring; sensor; calibration accuracy; laser tracker
郑阔,李长青,崔有祯,等.模架无线实时变形监测系统的设计与精度标定[J].测绘通报,2017(6):137-141.
10.13474/j.cnki.11-2246.2017.0208.
2016-11-02
北京市教育委员会创新平台项目(PXM2014-014225-000020);北京工业职业技术学院一般科研课题(bgzyky201720)
郑 阔(1975—),男,硕士,讲师,主要研究方向为工程测量。E-mail:171341968@qq.com
P208
A
0494-0911(2017)06-0137-05
Design and Precision Calibration of Wireless Real-time Deformation Monitoring System for Form-workZHENG Kuo,LI Changqing,CUI Youzhen,WU Shenglin(College of Architecture and Surveying and Mapping Engineering, Beijing Polytechnic College, Beijing 100042, China)
