基于AMESim和Matlab/Simulink的耦合振动台建模仿真
2017-07-03段云龙
段云龙
(驻某地区军代室, 河北 张家口 075041)
【机械制造与检测技术】
基于AMESim和Matlab/Simulink的耦合振动台建模仿真
段云龙
(驻某地区军代室, 河北 张家口 075041)
运用AMESim仿真软件对液压系统进行了建模,利用AMESim和Matlab/Simulink接口功能建立伺服系统的联合仿真模型,进行了仿真试验对比分析。仿真结果表明,该系统能够在两个自由度上谱再现车辆运输过程中的随机振动环境。
AMESim;Matlab/Simulink;二自由度耦合;振动台;仿真
车辆在地面行驶中的实际振动是一种宽带随机振动[1],它可以分解为三个平动和三个转动的六自由度振动。电液伺服道路模拟振动台由一个或几个液压缸组成的振动台面组成。试验时,将被试零部件装夹在台面上,通过台面振动,模拟路面不平度对零部件的激励[2]。相关实验可以通过设备进行,也可以通过计算机模拟,避免设备条件的限制。
实验研究表明,车体在运输过程中,六个自由度随机振动的功率谱密度差别很大,其中上下振动与俯仰振动的功率谱密度远大于其他四个自由度。从经济性和实用性角度出发,本文结合某工程实际需要构思了一种可实现上下振动和俯仰振动的二自由度耦合电液振动台,并运用AMESim和Matlab/Simulink接口功能建立了伺服系统的联合仿真模型。仿真结果表明,该系统能够在两个自由度上谱再现车辆运输过程中的随机振动环境。
1 机构的组成与自由度分析
机构的原动件是两个液压缸,一个液压缸底部固定在地面上,另一个液压缸底部连接一个转动副,两缸的输出端分别连接转动副,共同支撑起振动台面,通过两液压缸的不同输出,实现台面的上下振动和俯仰振动,结构示意图如图1。若将其视为平面机构,它的本质是一种平面连杆机构的演化形式,如图2所示。OD为机架,摇杆OA与机架OD组成转动副,杆DE垂直固定在机架上,A,B分别与杆OA和DE组成移动副。两个移动副为机构的两个驱动副,当机构的两个移动副作为输入时,连杆AB的位置发生变化[3]。
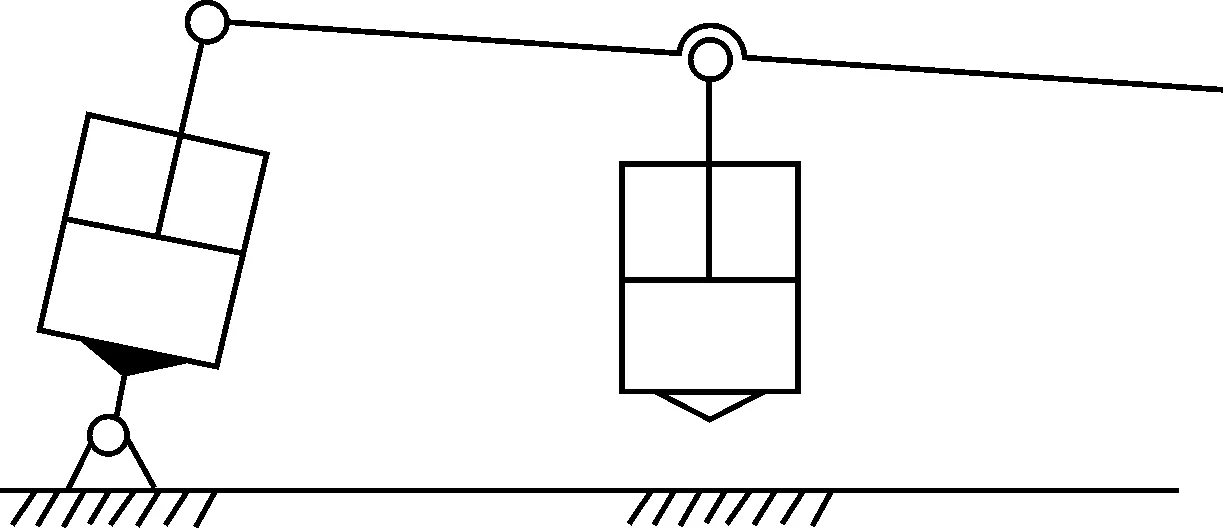
图1 耦合机构示意图
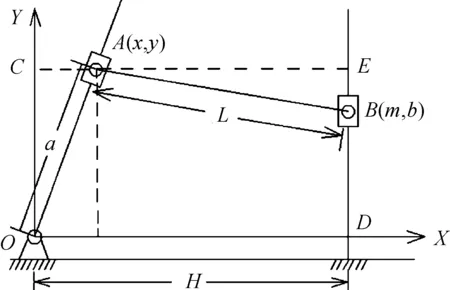
图2 平面连杆机构原理图
由图2可知该机构活动构件数n=4,低副数p1=5,高副数ph=0,带入平面机构的自由度计算公式,机构的自由度数F为
F=3n-2p1-ph=2
式中:n为机构的活动构件总数;p1为低副数目;ph为高副数目[4]。所以本机构为两自由度机构,满足上下振动和俯仰振动同时存在的设计目标。
在这个平面连杆机构中有两个原动件,模拟得到二自由度振动的振幅小,摇杆OA和连杆AB不共线,不存在有效驱动力矩为零,因此在机构运动过程中不存在死点位置[5]。
2 耦合振动模拟系统的建模仿真
AMESim软件提供了一个图形化的时域仿真建模环境,用于工程系统建模、仿真和动态性能分析,适用于机械与液压领域的设计[6]。针对控制系统,Matlab/Simulink拥有非常强大的控制系统建模能力,其中包括了模糊控制器的设计模块。因此,利用AMESim软件拥有的与Matlab/Simulink软件的接口,建立伺服系统的联合仿真模型。
针对耦合振动台的双液压缸驱动的结构,利用AMESim软件建立联合仿真模型,对每个台面都加一个随机信号和阶跃信号来仿真试验过程中的不确定性干扰,如图3所示。
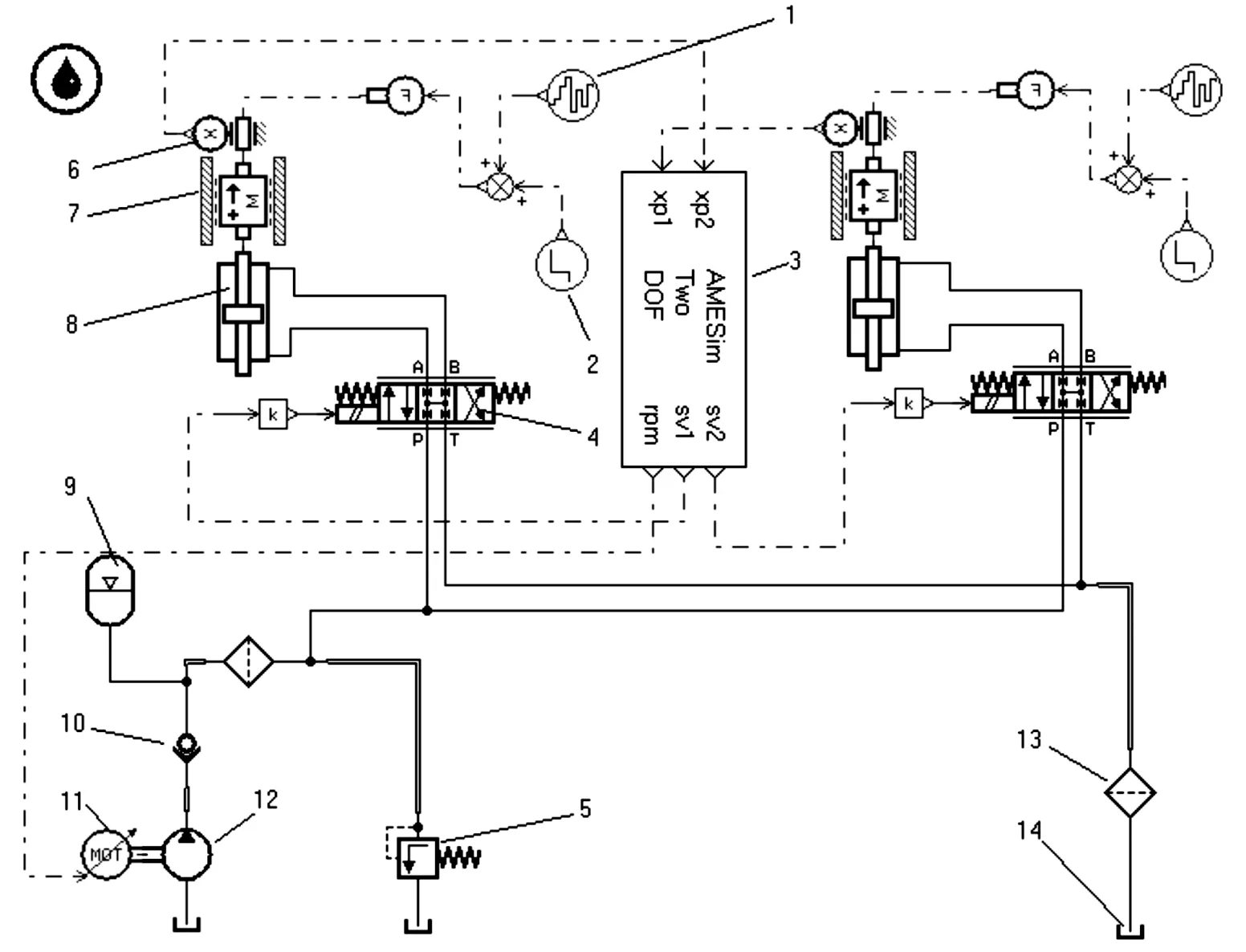
1.随机干扰;2.阶跃干扰;3.联合仿真接口;4.比例伺服阀;5.溢流阀;6.位移传感器;7.负载和台面质量;8.油缸;9.蓄能器;10.单向阀;11.驱动电机;12.定量泵;13.滤油器;14.油箱
图3 联合仿真模型图
Simulink整体仿真模型中作为控制元件的“Fuzzy PID Control”和执行元件的“Subsystem”都是通过“Create subsystem”功能建立封装后的元件,其核心部分是根据台面的运动方程编写的两个“S-Function”组件,如图4所示。

图4 系统联合仿真
3 仿真结果分析
为了验证计算机模拟实验效果,进行仿真分析。如图2所示,将振动台演化成平面连杆机构形式,假设两液压缸不作动时,a与b的初始值均为1 m,振动台面长L=3 m,两液压缸底端水平距离H=3 m。将解放牌运输车在普通平板公路以30 km/h车速行驶时车厢的振动环境作为仿真对象,模拟车厢的俯仰和垂直上下两个自由度的振动。通过真实环境下的实测数据计算出图2中的液压缸端点的输入位移信号,作为仿真模型的输入信号,设置联合仿真终止时间为 5 s[7]。振动台面的仿真信号与系统原始输入信号对比如图5和图6所示。
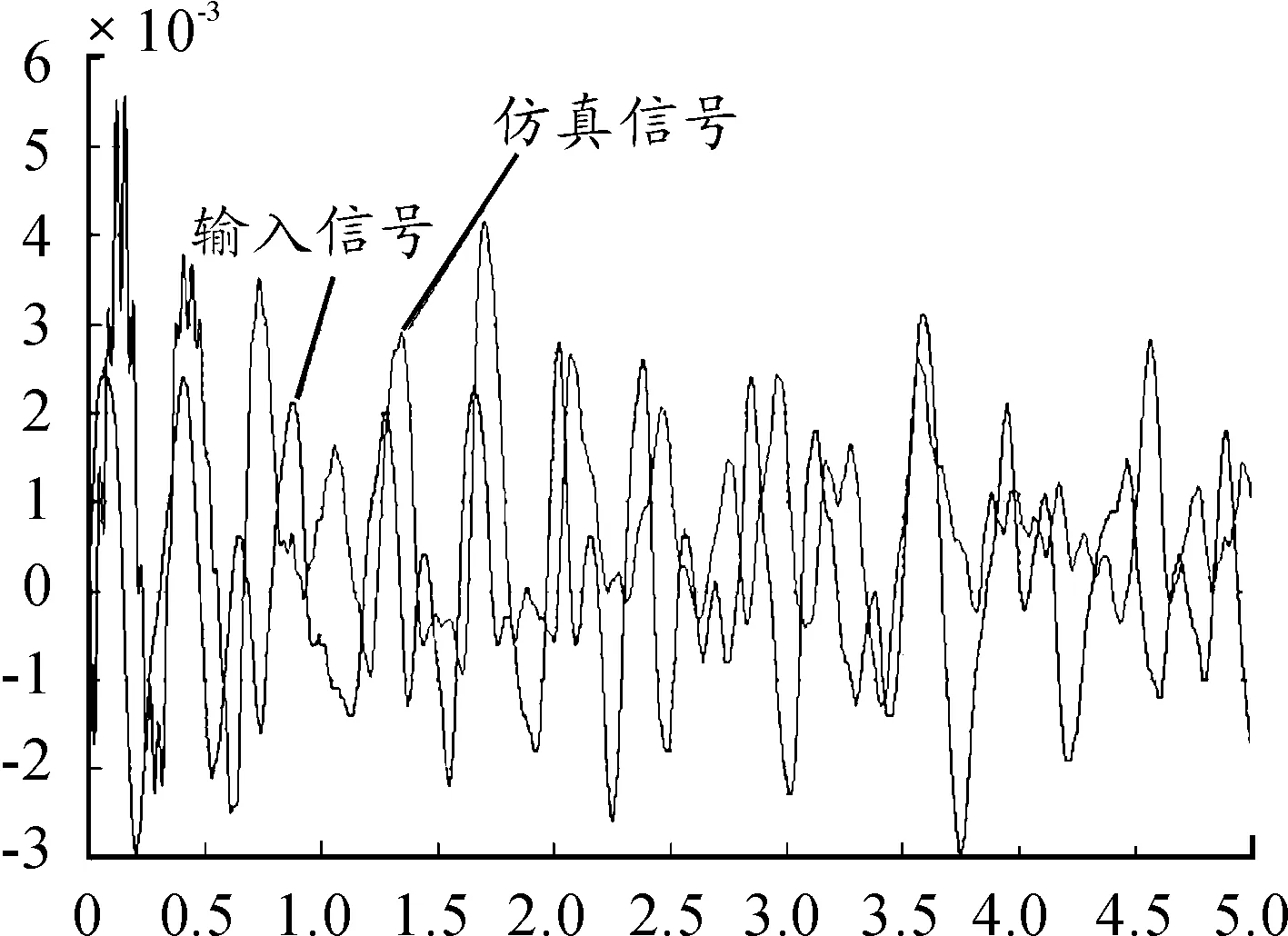
图5 垂直上下振动信号对比(m)
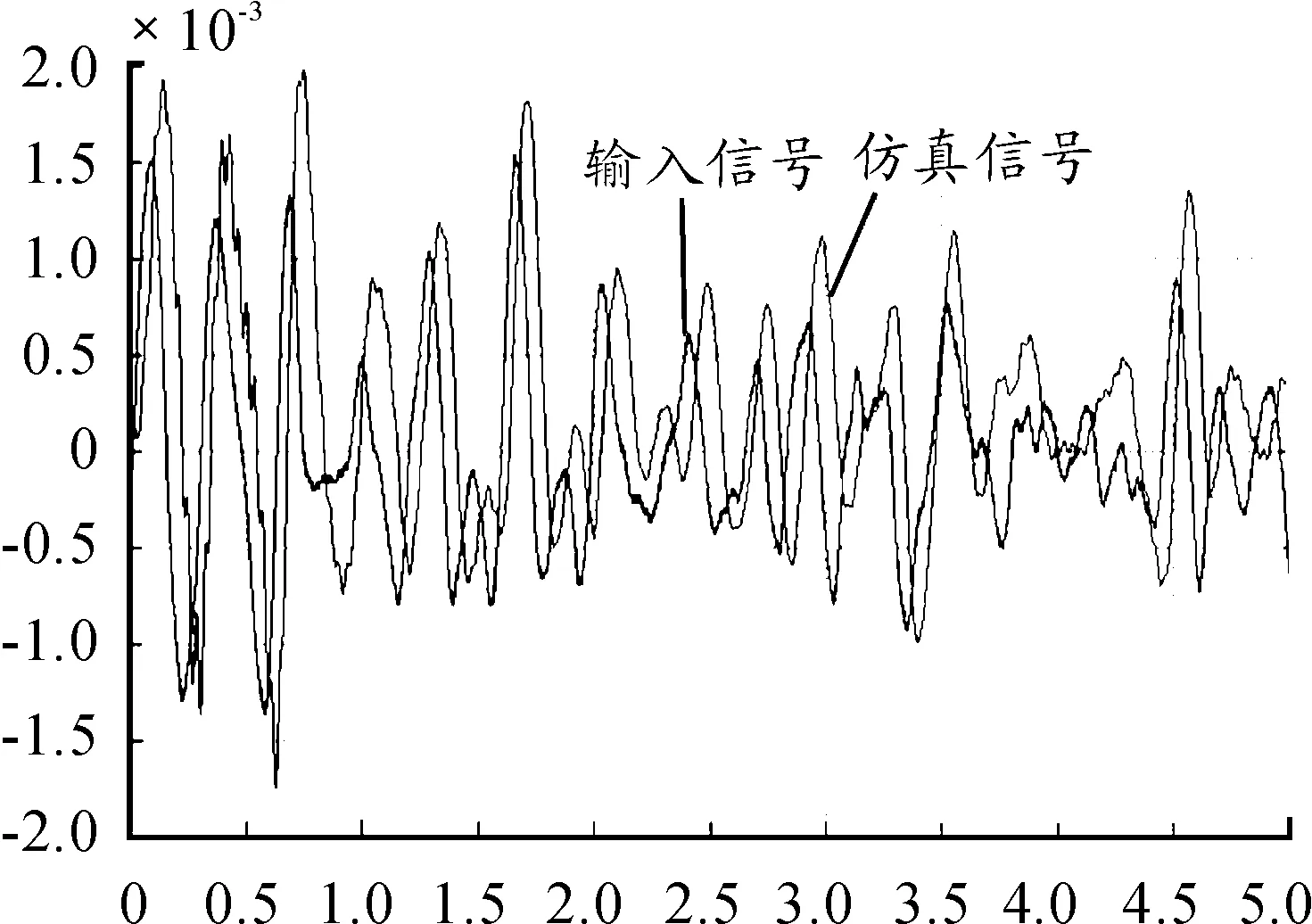
图6 俯仰角信号对比(rad)
将原始输入数据与仿真所得数据利用Matlab软件编程计算,仿真环境下的台面俯仰角和垂直上下位移的功率谱密度对比,如图7所示。从功率谱曲线可以看出,原始信号与仿真信号的功率谱密度一致。
通过以上分析,可根据计算得到的台面中点及端点位置的即时坐标数据,应用Matlab中的“drawnow”函数画出振动台面的动态示意图,更加直观表达二自由度振动台面的运行形式。以仿真运输车在普通平板公路行驶时的振动环境为例,如图8至图11为示意动画中台面运动到四个不同位置的截图。
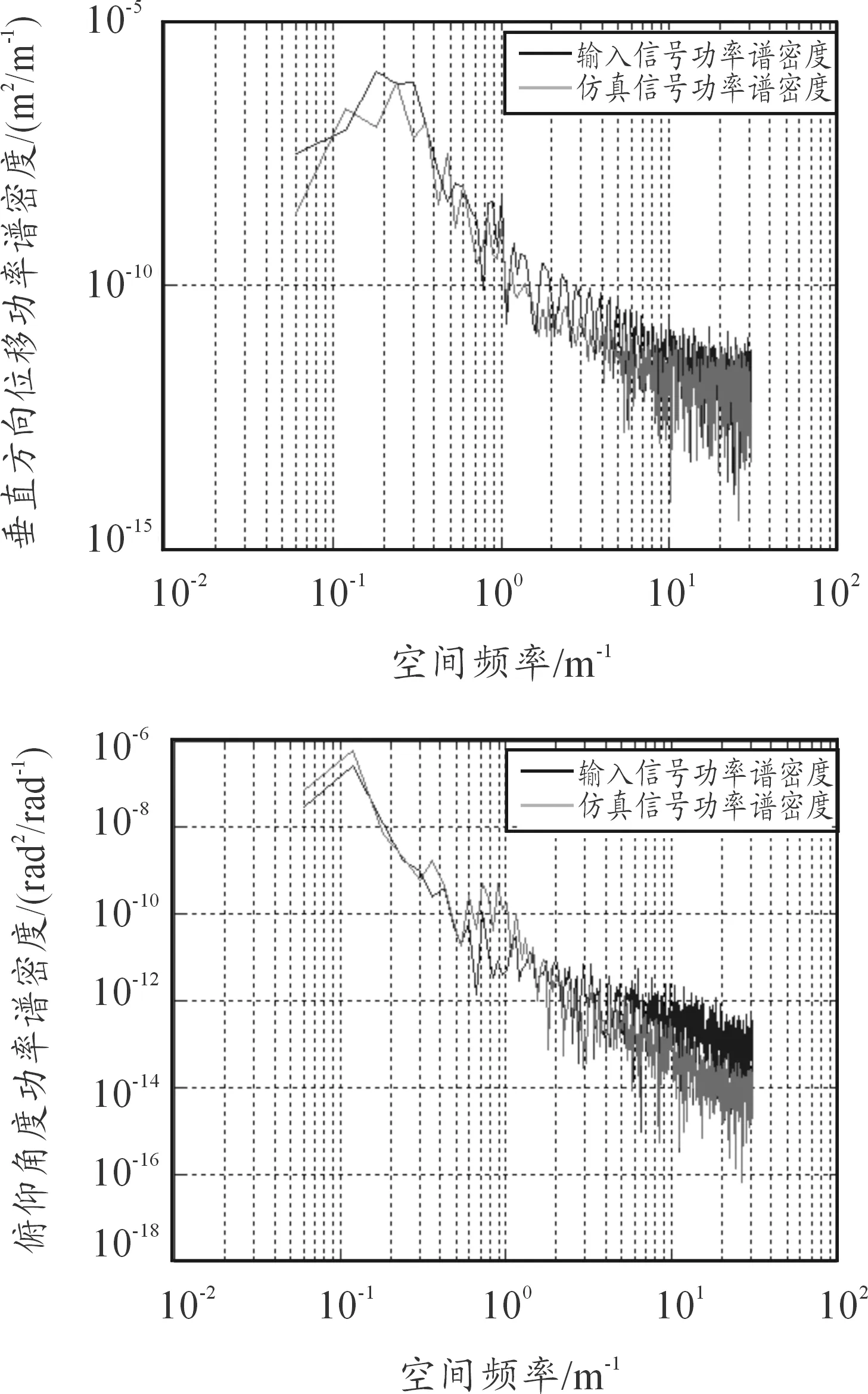
图7 普通平板公路振动环境功率谱密度对比
图8 (a)

图9 (b)

图10 (c)

图11 (d)
4 结论
提出了一种适用于电液伺服道路模拟系统结构简单和易于控制的二自由度耦合振动台。该振动台具有结构简单和易于控制等优点,并且造价和使用费都较低,模拟实现的自由度数目少,可靠性较强;对其结构进行了初步分析,为进一步研究奠定了基础。通过基于AMESim和Matlab/Simulink软件的联合仿真结果表明,该结构适用于公路运输等振幅较小的振动模拟系统。
[1] 余志生.汽车理论[M].北京:机械工业出版社,2007:202-211.
[2] 杨云.电液道路模拟振动台及功率谱再现控制的研究[D].西安:西安交通大学,2003:3-12.
[3] 李盛海.液压机构及其组合[M].北京:清华大学出版社,1992:8-12.
[4] 安子军.机械原理教程[M].北京:机械工业出版社,2004:10-14.
[5] 张静,许忠华,臧文福.确定平面低副四杆机构死点位置的新方法[J].森林工程,2007,23(4):28-29.
[6] 秦家升,游善兰.AMESim软件的特征及其应用[J].工程机械,2004(12):6-8.
[7] 段云龙,韩保红,马英忱,等.一种二自由度并联电液振动台的机构和运动学研究[J].机械传动,2011,35(6):34-36.
(责任编辑 唐定国)
Simulation for Coupled Shaking Table Based on AMESim and Matlab/Simulink
DUAN Yun-long
(The Military Representative Section in a Certain Area, Zhangjiakou 075041, China)
The hydraulic system of simulation is modeled by using software AMESim. The joint simulation model of servo system is established by using AMESim and Matlab/Simulink interface function, and then simulation test is analyzed in comparison. Co-simulating results show that the system can reproduce the random vibration environment of ammunition transportation in two degrees of freedom.
AMESim; Matlab/Simulink; two-DOF coupled; shaking table; simulation
2017-02-15;
2017-03-16
段云龙(1986—),男,硕士,工程师,主要从事振动测试研究。
10.11809/scbgxb2017.06.026
format:DUAN Yun-long.Simulation for Coupled Shaking Table Based on AMESim and Matlab/Simulink[J].Journal of Ordnance Equipment Engineering,2017(6):117-120.
TJ06
A
2096-2304(2017)06-0117-04
本文引用格式:段云龙.基于AMESim和Matlab/Simulink的耦合振动台建模仿真[J].兵器装备工程学报,2017(6):117-120.
