面向船舶间无线激光通信的激光束位置稳定技术
2017-06-29楼利旋司玉林
徐 娇, 杨 萍 , 楼利旋, 司玉林, 宋 宏
(1. 上海船舶工艺研究所 舟山船舶工程研究中心, 浙江 舟山 316021;2. 杭州电子科技大学, 浙江 杭州 310018; 3. 浙江大学, 浙江 杭州 310058)
面向船舶间无线激光通信的激光束位置稳定技术
徐 娇1, 杨 萍2, 楼利旋3, 司玉林3, 宋 宏3
(1. 上海船舶工艺研究所 舟山船舶工程研究中心, 浙江 舟山 316021;2. 杭州电子科技大学, 浙江 杭州 310018; 3. 浙江大学, 浙江 杭州 310058)
出于解决船舶间无线激光通信的应用需求,为船舶间激光束的实时稳定提供参考数据的目的,试验采用闭环倾斜镜系统进行激光束位置稳定,最终证明闭环控制对光束漂移具有抑制作用,而且光斑质心在两个方向上抖动的标准差分别下降了60.1%和62.5%。位置传感器的数据表明,频率在40 Hz以内的光斑抖动可以得到有效校正。研究结果为船舶间激光束的实时稳定提供了一定的参考。
无线激光通信;倾斜镜;静态模型;闭环控制
0 前言
无线激光通信技术以激光作为信息传播的媒介,具有带宽高、保密性强、无需频谱许可证等优点,非常适用于舰船之间的通信,与现有的船载微波通信系统互补[1]。
激光束在海面上方传输时会受到大气湍流的影响,造成光束漂移和到达角起伏等问题[2-3]。此外,舰船自身的振动也会引起光束的动态漂移。这在很大程度上限制了船舶间激光通信的可靠性和稳定性,而倾斜镜可以有效校正光束的漂移[4]。
倾斜镜由多个执行器与平面反射镜组成,通过对执行器施加电信号控制其伸缩,驱动平面镜偏转,从而改变光束的传输方向,实现对激光束偏移的校正[5]。传统倾斜镜的控制方法往往采用(Proportion Integration Differentiation, PID)控制器进行反馈控制[6-7]。PID控制器适用于单输入单输出系统,应用到多输入多输出系统时,往往需要多个PID 控制器进行控制。由于二维倾斜镜系统是一个双输入双输出系统,各输入输出通道之间存在耦合[8],使用PID控制器需要对系统的输入和输出进行解耦。在试验中可以通过调节倾斜镜的摆放位置进行解耦,但这种方法会增加试验的复杂度并且不易完全去除耦合带来的影响。本文运用基于模型的控制方法,提高控制器性能,采用最小二乘法,根据系统的输入输出数据,建立系统的静态模型,并基于模型设计静态控制器,实现倾斜镜系统的闭环控制。该方法考虑了耦合的影响,适用于多输入多输出系统。
一般倾斜镜系统所使用的传感器有(Charge-Coupled Device, CCD)相机和位置传感器(Position Sensor Detector, PSD)2种[9-10]。普通CCD相机的采样频率很难像PSD一样达到数千赫兹,但是可以从CCD图像中直接观察闭环控制效果。使用CCD相机作为闭环传感器时,闭环控制带宽往往受制于相机的采样频率。KUANG等[11]使用低频相机通过零极点相消的方法扩大系统的频率,但是该方法依赖于精确的数学模型。由于静态模型的精确性不高,本文采用PSD传感器作为闭环传感器,同时使用相机观察闭环控制效果,并将PSD输出数据的分析结果与相机直观的观测结果进行比较。在试验结果分析时,同时运用时域分析与频域分析的方法,比较无湍流、有湍流且控制器不闭环、有湍流且控制器闭环这3种情况下激光束的位置情况,从而证明系统对激光束的位置具有良好的闭环控制效果。
1 试验装置
倾斜镜闭环控制系统的结构示意图如图1所示,试验平台如图2所示。

图1 倾斜镜试验平台结构

图2 试验平台实物
试验平台的工作原理如下。氦氖激光器(波长632.8 nm,功率2 mW)发出的激光束先通过湍流发生器,受到湍流作用而产生随机偏折和漂移。湍流发生器依靠加热空气来产生不规律的湍流。激光束传输一段距离后用2个平凸透镜(焦距分别为250 mm,50.8 mm)对激光束进行缩束。考虑到激光器的功率过大,易导致相机中的光斑过曝,因此在光束到达倾斜镜之前加了2个偏振片,用以减弱入射光的强度。入射光束经过倾斜镜(Fast Steering Mirror, FSM)反射后,被分光镜分为2束,其中1束光线进入相机(ZWO,ASI035MM,采样频率30 Hz)中,另1束光线进入到二维位置传感器(PSD,S 5991-01)中。利用位置传感器输出的4路电压信号可以计算得到激光光斑的位置坐标。控制器利用光斑位置坐标计算得到控制信号,并输出到倾斜镜,使其发生偏转。相机通过USB与计算机连接,通过相机观察光斑的位置,能够直接观察闭环控制器的效果。
2 建模与控制器设计
闭环控制器的实现首先需要对压电倾斜镜系统进行建模,建模原理如图3所示。

图3 倾斜镜系统建模
首先利用计算机产生一组随机控制电压u(k)∈R2,其中k为离散时间,k=1,2,3,…。将两路随机控制电压施加于倾斜镜的2路驱动器,倾斜镜将会产生偏转,使得光斑发生抖动,相对应地从位置传感器测得光斑的位置为y(k)∈R2,k=1,2,3,…。假设倾斜镜系统是静态系统,即
式中:M为倾斜镜静态模型,M∈R2×2。
根据试验数据{u(k),y(k)}以及式(1) ,对于不同的时刻k,有如下线性方程:

(2)


倾斜镜系统的闭环控制框图如图4所示。图中yr(k)为光斑质心的目标位置,y(k)为位置传感器得到的光斑质心位置,光斑位置残差e(k)的计算公式为

图4 倾斜镜系统闭环控制
根据k时刻的位置残差e(k),假定yr(k+1)=yr(k)且e(k+1)=0,则下一时刻的控制信号u(k+1)的计算公式为
考虑静态模型和实际系统存在着误差,因此在公式中引入步长系数μ,范围为0<μ≤1。通过引入该系数可以平衡闭环系统的性能和稳定性。要得出精确的系数μ,就必须多次进行上述试验,将得出的数据与系数μ进行对比、调整,可以达到最精确的系数值,以期达到最优的控制效果。
3 试验和结果分析
3.1 系统建模


图5 两路随机驱动电压
利用建模组的输入输出数据,计算得到模型的VAF值为64.4%;利用测试组的数据进行测试,模型的VAF值为64.1%。分别绘制2组数据估计值和测量值的比较图,如图6和图7所示。图中虚线为模型估计值,实线为系统的测量值,图6为建模组,图7为测试组。两种情况下模型的VAF值比较接近,证明了模型的普适性,VAF值都在64%左右,说明模型的精确性还有待提高,主要原因在于倾斜镜的动态响应时间较长,其动态过程容易被忽略,这些原因导致模型的精确性受到了限制。

图6 建模组的估计值和测量值比较

图7 测试组的估计值和测量值比较
3.2 闭环控制

为比较开环和闭环条件下光斑的抖动情况,试验时先保持开环一段时间,使用位置传感器和相机同时分别记录光斑的二维位置(x,y),其中x代表水平方向,y代表竖直方向。然后进行闭环试验,同样使用相机和位置传感器分别记录光斑位置。为便于分析比较,开环与闭环持续时间相同。由于闭环控制器运算速度的限制,设定采样频率为1.6kHz。位置传感器记录的位置信号如图8所示。上图为x轴方向上的光斑位置随时间的变化,下图为y轴方向上的光斑位置随时间的变化。从图8中可以看到闭环控制后光斑在两个维度上的抖动幅度都减小了,位置变化相对开环更为稳定。
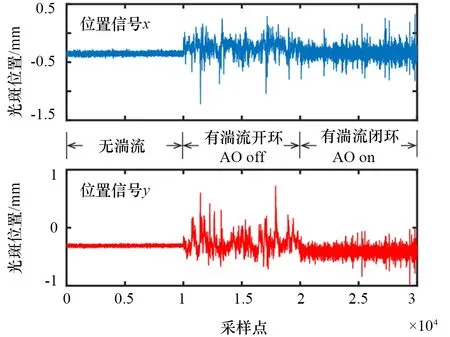
图8 位置传感器记录的光斑位置
将时域信号转换为频域信号,绘制功率谱密度,如图9和图10所示。为了更清楚地看闭环控制器的增益效果,将闭环的功率谱除以开环的功率谱,从而得到闭环传递函数的功率谱密度,如图11所示。从图中可以看到x方向和y方向上的增益非常接近,闭环系统对光斑的校正频率达到了40Hz。

图9 x方向的光斑位置功率谱密度

图10 y方向的光斑位置功率谱密度

图11 闭环传递函数的功率谱密度
在试验过程中,从相机上实时观察闭环控制对光斑抖动的抑制效果。如图12所示,30帧照片叠加取平均值,左图为开环时得到的图像,右图为闭环时得到的图像。图中“+”符号位置为参考目标位置,虚线圈为光斑的参考区域。该区域半径的计算方法是将图像中每个像素点的亮度值归一化,取亮度值大于0.5的点计算面积,然后根据面积求得圆的半径。可以看到在闭环的作用下光斑的中心位置得到校正,光斑的亮度分布也更为集中。

图12 多帧图像平均值
通过相机记录光斑的质心位置x和y随着每一帧图片的变化,得到图13和图14所示的光斑位置的时域变化图。在开环和闭环条件下分别记录300帧,图中的虚线代表的是开环状态下光斑质心位置随时间的变化,实线代表闭环时的情况。由图可知当系统执行闭环控制之后,光斑的抖动得到了有效抑制,与位置传感器记录得到的结果一致。

图13 相机记录光斑位置x

图14 相机记录光斑位置y
计算每一帧光斑的质心位置,并把在开环和闭环条件下的所有点分别表示在散点分布图上,如图15和图16所示。统计y轴方向上光斑实际位置和目标点位置的差值Δy,绘制分布直方图,如图17和图18所示。从上述图中可以看到闭环系统抑制了光斑抖动,使得光斑的质心位置更集中在目标点周围。

图15 开环时光斑中心散点分布
相较于位置传感器,相机能够直观地观察光斑的抖动。为了比较两种传感器观测所得到数据的一致性,分别计算闭环前后光斑在x轴和y轴方向上坐标值的标准偏差,如表1所示。

图16 闭环时光斑中心散点分布

图17 开环光斑位置与目标位置差值分布直方图

图18 闭环光斑位置与目标位置差值分布直方图
从表1数据中可看到位置传感器和相机均表明闭环控制确实对光斑抖动起到了有效的抑制作用。在y轴方向上位置传感器和相机观察到闭环控制对光斑抖动的抑制效果接近,分别为63.5%和62.5%;但在x轴方向上相差较大,分别为47.3%和63.5%。产生该结果的可能原因是在x轴方向上,激光束并非垂直射入相机中,使得相机观察所得结果与位置传感器有较大偏差。

表1 光斑在x方向和y方向上抖动的标准偏差
4 结论
文中利用位置传感器所得到的信号对倾斜镜系统进行了静态建模,根据所得到的静态模型设计闭环控制器,对光斑漂移进行闭环校正,并分别使用位置传感器和相机观测闭环控制效果。
结果显示闭环系统能够对频率在40 Hz以内的光斑抖动起到良好的校正效果,闭环之后光斑质心的分布集中在目标点的附近,证明即使在使用的静态模型并不十分精确的情况下,闭环控制系统还是能够对湍流所造成的光斑抖动起到一定的抑制效果,同时也利用相机验证了位置传感器所得的试验数据能够真实反应光斑的位置以及闭环的控制效果。
由于试验中闭环控制使用的是静态模型,其精确性还有待提高,因此在后续的工作中将使用动态模型进行控制器设计,以提升闭环控制的效果,应用于船舶间的无线激光通信。
[ 1 ] 曾华, 谭丽, 彭小娟. 海洋大气湍流对舰船无线激光通信的影响[J]. 广州航海学院学报, 2016, 24(2):4-6.
[ 2 ] 陈媛, 余成波, 万文略. 自由空间激光通信技术及其发展[J]. 重庆工学院学报, 2002, 16(3): 59-64.
[ 3 ] 梁波, 朱海, 陈卫标. 大气到海洋激光通信信道仿真[J]. 光学学报, 2007, 27(7): 1166-1172.
[ 4 ] WU S H. Laser communication wireless between ships[M]. Laser & Infrared, 2003.
[ 5 ] PORTILLO A A, ORTIZ G G, RACHO C. Fine pointing control for optical communications[C]//Ae-rospace Conference, 2001.
[ 6 ] 谭逢富, 陈修涛, 姚佰栋, 等. 激光大气传输倾斜校正系统[J]. 红外与激光工程, 2011, 40(3): 429-432.
[ 7 ] 刘敏. 快速倾斜镜的模糊 PID 自适应控制器设计[J]. 光学技术, 2008, 34(2): 227-229.
[ 8 ] HEI M, ZHANG L C, ZHOU Q K, et al. Model-based design method of two-axis four-actuator fast steering mirror system[J]. Journal of Central South University, 2015, 22(1): 150-158.
[ 9 ] TIAN J, YANG W, PENG Z, et al. Application of MEMS accelerometers and gyroscopes in fast steering mirror control systems[J]. Sensors, 2016, 16,4: 440.
[10] ZHU W, BIAN L, AN Y, et al. Modeling and control of a two-axis fast steering mirror with piezoelectric stack actuators for laser beam tracking[J]. Smart Materials & Structures, 2015, 24(7).
[11] KUANG J M, ZHANG S. Control of fast steering mirror system based on the CCD with low frame frequency[J]. Journal of Sichuan Normal University,2012.
Stabilization Technique of Laser Beam Position for Inter-Ship Wireless Laser Communication
XU Jiao1, YANG Ping2, LOU Lixuan3, SI Yulin3, SONG Hong3
(1.Zhoushan Ship Engineering Research, Shanghai Shipbuiding Technology Research Institute,Zhoushan 316021, Zhejiang, China; 2.Hangzhou University of Electronic Science and Technology, Hangzhou 310018, Zhejiang, China;3.Zhejiang University, Hangzhou 310058, Zhejiang, China)
In order to solve the application requirement of wireless laser communication between ships, and provide reference data for the real time stability of the laser beam, the closed loop fast steering mirror system is used to stabilize the laser beam position stability. It proveds that the closed-loop control has an inhibitory effect on the beam drift, and centroid in two directions jitter standard deviation decreased by 60.1% and 62.5% respectively. Data of the position sensor show that the spot jitter can be corrected effectively within 40 Hz. The results provide a reference for the real-time stabilization of the laser beam between ships.
wireless laser communication; fast steering mirror; static model; closed-loop control
国家自然科学基金项目(编号:61605038);国家“863”计划项目(编号:2014AA093400)
徐 娇(1982-),女,工程师,主要从事船舶与海工舾装设计、造船装备先进制造技术研究
1000-3878(2017)03-0081-07
TP273
A
