湖底隧道测量控制网的设计与实现*
2017-06-28杜笑芳杨兆龙
杜笑芳,杨兆龙
(1.广东省水利水电第三工程局有限公司,广东 东莞 523710; 2.江苏省地质测绘院,江苏 南京 211102)
湖底隧道测量控制网的设计与实现*
杜笑芳1,杨兆龙2
(1.广东省水利水电第三工程局有限公司,广东 东莞 523710; 2.江苏省地质测绘院,江苏 南京 211102)
介绍了在湖底隧道测量工程中,采用“一点一方向法”建立GPS平面控制网的方法,并通过实例验证了该方法的可行性和有效性,为在同类隧道工程中建立平面测量控制网提供参考。
GPS;隧道测量;平面控制网;平差计算
0 引言
在穿越大型湖泊隧道工程的施工中,为了保证隧道的顺利贯通,应确保洞外控制网的精度满足相应规范要求。一般采用二等水准测量方法建立高程控制网。而对平面控制网而言,如控制网精度不高,会造成平面控制点坐标反算的边长与实测边长产生较大的差值,即产生长度投影变形,会对线路施工放样及隧道贯通测量等工作造成较大影响[1-3]。
因此,平面控制网的建立是湖底隧道测量工程的重点。为此,本文以某湖底隧道测量工程为例,介绍了隧道工程的施工中二等GPS平面控制网的设计与实现方法。
1 方案设计
湖底隧道二等GPS平面控制网建立项目的重点包括二等GPS网的布网方案、二等GPS观测墩的埋石、二等GPS观测方案和利用全站仪进行基线加测的方法、二等GPS控制网起算数据的选择和平差计算的方法以及二等水准测量。在测量时,两岸各采用一个国家一等水准点作为起算点,并纳入同一水准路线进行观测计算。
为达到控制控制网边长变形的目的,应在整个隧道区域建立二等独立坐标系统。根据隧道实际情况,本项目采用“一点一方向法”。一点一方向是指采用一个固定点坐标作为工程起算点,以一个固定方向的方位角作为工程控制网的起算边,从而建立相对独立坐标系的方法。
2 方案实施
2.1 选点埋石
为了使GPS网有良好的结构且利于隧道相关测量,结合实地地形情况,二等GPS点布设于隧道两端出口附近,每个点保证至少有一个通视方向,埋石位置有利于平面控制向围堰及建成后的隧道内的传递。
GPS点四周没有仰角高于15°的成片障碍,以利于卫星信号的接收。点位远离大功率无线电发射源(如电台、微波站等)和高压输电线。点位附近没有强反射的地面和环境或对电磁波接收有强烈干扰的物体,以免多路径效应引起定位点坐标误差。选点埋石应注意以下两点:
1)二等GPS网点点位都选取在距设计的隧道中线附近基岩层较浅、方便埋设、利于长期保存、便于使用的地方。
2)二等GPS网中相邻点之间的距离应根据实际情况,保持在一定范围内,通常在在1~10 km之间。由于本网中跨越水面宽度较宽等实际原因造成相邻点间距较长,应通过增加观测时间,以确保精度达到相关规范的要求。
2.2 外业观测
外业采用多台GPS同步观测,作业方式采用静态相对定位模式。为了加强GPS网的强度,主要采用网连式构网方案。GPS测量时应达到以下技术要求:
1)卫星高度角应大于15°,有效观测卫星个数大于4个。
2)观测墩的控制点采用强制对中方式,联测点采用经检验过的光学对中器对中。为消除相位中心偏差对测量结果的影响,测量前用指南针先在观测墩上划好指北线,使天线指北线与观测墩上的指北线重合,使定向误差小于5°。
3)在测量过程中,对每个测站的作业状态进行了认真的记录,在参考GPS测量规范的基础上设计了专用的GPS外业记录手簿。
4)天线要求严格整平,天线高在测量前后各量取一次,量取时从3到4个不同方向分别量取,互差不得大于1 mm。
5)观测组严格按照调度表规定的时间作业,保证了同步观测同一卫星组。
6)数据采集时,测量人员关闭手机和对讲机,并禁止周围人员使用手机。
3 数据处理
3.1 数据处理方案
平面控制网采用GPS数据与常规测量数据联合平差处理方案。GPS基线解算采用双频解算,经三维无约束平差得到所有GPS基线向量数据,采用高精度全站仪观测8条边长(对向观测),对观测边长进行气象元素及加乘常数改正后投影到高斯平面上,由GPS基线向量和改正后边长建立误差方程式进行联合平差。
3.2 联合平差计算
联合网平差使用同济大学研制的工程控制GPS网专用数据处理系统GPS-NET Processing System进行处理。
平差采用含有地面起算数据和观测数据的GPS网三维严密平差。平差的起算数据以一个控制点为三维平差的基准点和一个已知基线的方向作为方位基准。联合平差模型主要由GPS基线向量ΔRij观测值误差方程和边长误差方程组成。平差模型中基线向量ΔRij误差方程为:
(1)

平差模型中边长误差方程式为:
(2)

4 应用实例
苏锡常南部高速公路为规划建设“五纵九横五联”高速公路网中的“横六”,工程起自与常宜高速公路联接的前黄枢纽,沿东南方向进入无锡马山境内,穿越太湖湾接无锡环太湖高速公路。项目路线里程全长43.2 km,总投资预计达142.6亿元,其中太湖隧道长10.9 km,是目前国内最长的连续水下隧道。隧道跨越水面宽度约10 km,为确保隧道的施工和隧道变形监测,将建立测量控制网。
在太湖湾南北各埋设4个二等控制点,点号分别为N01、N02、N03、N04和S01、S02、S03、S04。采用太湖隧道中轴线马山侧二等控制点N03为起算点、中轴线(N03-S02)方向为起始方向。结合太湖隧道附近地形地貌情况,布网方案设计,如图1所示。二等GPS网应布设成独立网。全网共8个点,全网平均边长6.5 km左右。考虑到太湖隧道独立控制网的精度要求,为提高本网的可靠性,观测时段均为4个时段,时段长均大于5 h。

图1 控制网设计图Fig.1 Design map of contral network
本项目采用4台Leica 530,2台Leica 1230和2台Leica 1202同步进行观测,作业方式采用静态相对定位模式。为了加强GPS网的强度,主要采用网连式构网方案,并利用LGO软件对观测数据进行数据预处理。
5 精度统计
主要包括以下方面:
1)边长观测值改正数及精度成果
GPS观测值与边长观测值联合平差中的边长改正数中误差最大为2.33 mm,最弱边相对误差最大为1/806 564。
2)GPS和边长联合平差成果
GPS联合网数据处理一点一方向无约束平差后,坐标X和Y的平移量为482.741 819 6 km和-187.630 970 8 km,单位权中误差为0.151 922 mm。其中,平面控制点坐标成果及误差椭圆参数,最弱点为S03,点位中误差为2.05 mm。
3)联合网成果与实测平距比较
为了分析联合网成果的可靠性,将联合网成果与实测边长数据进行比较,较差成果统计,见表1。
表1 联合平差后平距与实测平距互差统计表
Tab.1 Statistical table for difference between measured and combined adjustment horizontal distances
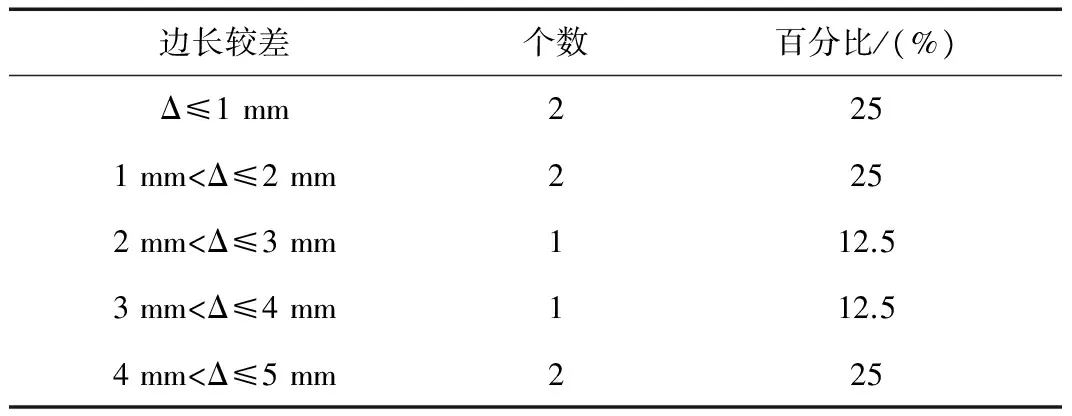
边长较差个数百分比/(%)Δ≤1mm2251mm<Δ≤2mm2252mm<Δ≤3mm112.53mm<Δ≤4mm112.54mm<Δ≤5mm225
从表1可以看出,联合网成果与边长外业观测成果差异较小,说明GPS联合网成果精度较高、质量可靠。边长丈量方向示意图,见图2。

图2 边长丈量方向示意图Fig.2 Diagram of side measured direction
6 结论
本文介绍了在湖底隧道施工测量工程中,二等GPS平面控制网的设计和实现方法,提出了在控制网跨度大、工程现场地质情况复杂的情况下,湖底隧道平面控制网的布设观测方案和实施方法即“一点一方向法”。通过具体实例验证了该方法的可行性和有效性,为湖底隧道测量控制网的建立提供参考。
[1] 张正禄,邓勇,罗长林,等.测量控制网优化设计的可靠性准则法[J].测绘科学,2008,33(2):23-24.
[2] 冯林刚.GPS测量控制网纳入独立坐标系的方法[J].地矿测绘,2000(3):6-8.
[3] 龚率,刘晓华,黄志伟,等.基于GPS网“一点一方向”平差的变形监测建网研究[J].工程勘察,2015,43(1):89-92.
Design and Implementation of Surveying Control Networkfor Crossing Lake Tunnel
DU Xiao-fang1,YANG Zhao-long2
(1.GuangdongNo.3WaterConservancyandHydro-electricEngineeringBoardCo.,LTD.,DongguanGuangdong523710,China; 2.JiangsuInstituteofSurveyingandMappingofGeology,NanjingJiangsu211102,China)
This paper introduces the method to establish plan control network of crossing lake tunnel survey project using the “one point one direction” method.The feasibility and effectiveness of the proposed method has been verified by an actual project.Also,it provides some references for the establishment of plan control network in the similar projects.
GPS;tunnel survey;plan control network;adjustment calculation
2017-03-29
P 258; U 452.1+3
A
1007-9394(2017)02-0008-02
杜笑芳(1965~),男,辽宁辽阳人,工程师,现主要从事工程测量应用方面的工作。