一种新型混联码垛机器人控制系统的研究
2017-06-26陈润六赵峰惠郑小民王红州邹晓晖
陈润六,赵峰惠郑小民,王红州,邹晓晖
(1.江西省机械科学研究所,江西南昌330002;2.江西现代职业技术学院,江西南昌330002)
新产品开发
一种新型混联码垛机器人控制系统的研究
陈润六1,赵峰惠2郑小民1,王红州1,邹晓晖1
(1.江西省机械科学研究所,江西南昌330002;2.江西现代职业技术学院,江西南昌330002)
介绍了一种新型混联码垛机器人的控制系统,阐述了其控制流程、软硬件选型和设计、人机交互界面等。系统并联部分采用三台电动缸作为执行机构,主轴和动平台转轴采用两台电机加减速器组合。控制方法为“工业控制机+运动控制器”模式,运动控制器采用STM32F4系列单片机作为主芯片。样机的运行表明:本系统安全可靠,成本较低,具有良好的市场应用前景。
混联;码垛机器人;STM32;电动缸
在码垛机器人的控制系统研究领域,控制方式主要有以“工业控制机(IPC)+运动控制器”为核心的运动控制系统和嵌入式运动控制系统。其中,前者的运动控制器可以采用传统PLC[1,2]、ARM系列单片机[3]、DSP类控制器(如PMAC或TRIO运动控制器)[4,5]、PCC[6]或者前三者搭配使用[7];后者常采用ARM系列处理器作为主控芯片,嵌入Linux或WinCE操作系
统[8,9]。
本文采用的是ST公司的STM32F4系列,其基于ARM Cortex-M4,最大的特点是具有ARM+DSP的功能,能够支持浮点运算,且成本较低。
1 混联码垛机器人的机械结构
采用2-UPS/U并联构型实现码垛机器人的旋转与抬升运动。串联机构以结构简单、动作灵活、工作空间大等优势成为现有码垛机器人所采用的主流构型,但其刚性差、误差累积、惯量大等问题也使得其性能受到制约,因此串联结构的机器人为达到一定的刚性不得不使用笨重的机械手臂,而笨重的机械手臂又致使机构惯量大,动力学性能差。另外,对于驱动安装在关节处的机械手,机构对驱动扭矩的要求非常高,这就不得不采用减速比大且昂贵的减速装置,造成机器人的荷重自重比小且造价高。本项目将码垛机器人负荷最大的底盘回转部分及大臂抬升部分改为并联结构,大臂通过具有旋转和抬升运动的虎克铰与机架联接(取消驱动装置),两根具有伸缩功能的伺服驱动直线推杆两头通过虎克铰与球铰分别与机架和大臂上端联接,大臂和两根直线推杆构成空间三棱锥结构,直线推杆的伸缩可实现大臂的旋转和抬升两个自由度的运动。两根直线推杆在两端联接的情况下成为两条无约束支链,推杆只受拉压两力,因此这两根直线推杆的力学性能可以发挥到最优状态,其机械结构见图1。三棱锥结构的优点是刚性特别好,尤其两根直线推杆只受拉压力,因此该并联部分可以做成轻杆,可大大提高机器人的刚性并降低机器人的自重,制作出来的实体样机如图2所示。

图1 结构仿真

图2 实体样机
2 控制流程及软硬件设计
2.1 控制流程
图3为本系统的控制流程。主控制回路逻辑如下:监控计算机通过以太网通讯,把指令姿态和控制命令传输给微型控制器,微型控制器通过位姿转换和解算,计算出三只电动缸和两台减速器的运动参数(电动缸伸缩量和减速器转角),并通过CAN通讯把相应的位移量传递给伺服驱动器,进而控制电动缸的伸缩量和减速器转角,以实现上平台空间四自由度运动;同时控制计算机通过CAN通讯,得到电机的实际位置通过转换和解算后,将平台姿态发送给监控计算机。反馈回路逻辑为:编码器实时反馈电动缸位移信号和减速器转角信号,实现五台电机位置闭环控制,使其达到所要求的位移量,那么平台也就达到所期望的运动姿态。监测回路:为了保证平台安全可靠的运行,平台实时控制计算机,通过控制卡实时读取平台极限位置信号,故障安全报警信号,并实时处理,同时实时计算机平台位姿和运行状态,返回给监控计算机人机界面,供用户监控。
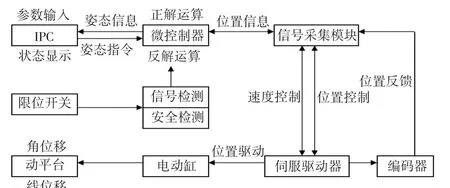
图3 控制流程
2.2 运动控制器
运动控制器的硬件电路由STM32F407微控制器和外围电路组成,主要包括:STM32F407基本电路、电源电路、时钟电路、复位电路、串口通信电路、以太网通信电路、JTAG调试接口电路、CAN总线通信电路、AD/DA电路、滤波放大电路、数字量输入输出电路等。图4所示为主控制器总体设计框图,图5为系统硬件方案,图6为运动控制器实体外观。
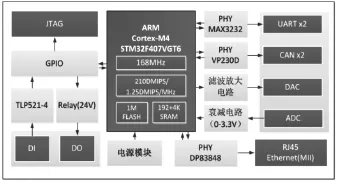
图4 主控制器总体设计框图
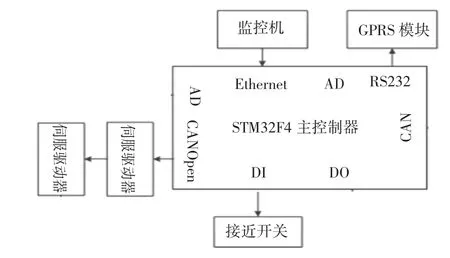
图5 系统硬件方案

图6 运动控制器
2.2.1 基于ARM Cortex-M4的STM32F4系列优势
浮点运算一直是定点CPU的难题,采用单片机进行浮点运算较为困难。现在有FPU或者硬件浮点运算能力的主要有高端DSP(比如TI F28335/C6000/ DM6XX/OMAP等),通用CPU(X87数学协处理器)和高级的ARM+DSP处理器等。STM32F4属于Cortex M4构架,这和M0、M3的最大不同就是支持浮点指令集,在处理数学运算时,能发挥其巨大的优势。
ST公司的STM32F4系列是高性能的基于ARM Cortex-M4的32位微控制器,工作频率高达168 MHz.Cortex M4具有浮点单元(FPU),支持所有的ARM单精度数据处理指令和数据类型,具有DSP处理指令和自适应的实时加速器(ART)。STM32 F4改进了一些外设,如全双工I2S、小于1uA的RTC以及2.44 MHz/s采样率的ADC,STM32 F4的通信接口高达15个。STM32 F4还包含512 KB~1 MB的片内内存存储器,多达192 KB的SRAM.系统采用STM32F4作为主控芯片。
2.2.2 电源模块
主要是为整个硬件平台系统正常工作提供所有必须的电源,包括为主控芯片的工作提供稳定的3.3 V工作电压,为放大电路的运算放大器提供±15V. STM32F4主控芯片具有独立的模拟电源引脚,模拟部分和数字部分分开供电,这样有效提高了模拟系统的抗噪性。
2.2.3 运动算法
运动平台的解算方法分为位置反解和位置正解。
已知输出件的位置和姿态,求解输入件的位置称为机构的位置反解。要实现对平台空间姿态的控制,就必需推导出平台的位置反解方程。
已知机构输入件的位置,求解机构输出件的位置和姿态称为机构的位置正解。本文所采用的是牛顿法,其基本原理就是将非线性方程组变成线性方程组,求出近似解,然后在此近似解基础上进一步迭代,逐步逼近非线性方程组真解。
本课题组在前期工作中已将正反解算法得出,并转化成代码写入芯片[10]。
2.3 主监控软件
监控软件主要由主操作窗口、监控窗口、外部输入列表窗口、单步运行窗口、点动运行窗口、高级用户窗口等组成,其示意图如图7所示,现分述如下:
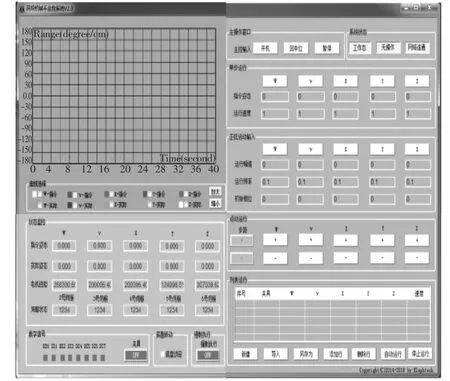
图7 监控软件示意图
主操作窗口主要包括平台的开机/关机、回零位、暂停/恢复等操作输入按钮;
监控窗口主要用于监控系统当前状态,包括实时显示平台实际姿态,电机伺服状态等;
外部列表输入窗口,将外部输入可执行外部路径文件(TXT文件),并自动按照规划路径运行。选取资源文件,系统读取当前文件,并按照文件内容运行到指定位置;
单步运行窗口包括单步点动输入及单步连续运动两部分。单步点动输入用于平台微动控制,步距及速度均可设置;单步连续运动,需设定目标位置与运行速度,平台自动运行到指令位置。
2.4 手持终端
手持终端与主计算机通过无线WIFI传输,主要由姿态、系统状态、点动窗口、当前状态显示窗口等组成,其示意图如图8所示,现分述如下:

图8 手持终端操作软件示意图
(1)主控窗口:主要包括平台回零位及退出等操作输入按钮;
(2)显示窗口:主要用于监控系统当前状态,包括实时显示平台当前姿态,系统状态,单步运行步距等;
①网络状态:
“NetRun”-网络正常;
“NetErr”-网络故障。
②当前步距:当前点动运行步距。
③当前状态:
“NULL”-无操作;
“SinMove”-单步运行;
“SinMotion”-正弦运动;
“BackToMid”-正在回中位;
“SinStep”-单步点动运行;
“ListExcu”-列表运行;
“TorqueErr”-电机扭矩超限警告。
(3)输入窗口:包括单步点动输入。单步点动输入用于平台微动控制,步距可由用户设置。单步点动输入分为两种工作模式:
①单步点动:每点击一次按钮,平台微动一步;
②单步连续点动:连续点击两次,长按按钮,系统连续运动,松开按钮,系统停止运动。
3 结束语
本文研发的新型混联码垛机器人控制系统以基于ARM构架的STM32系列微控制器为核心,采用以太网芯片、CanOpen总线芯片以及接口等组成。控制算法包含了位置反解和正解,实现了该机的示教功能。设计的主监控软件及手持终端的用户界面友好,充分考虑了样机调试、运行、示教等所需的功能实现。实验表明:该系统工作稳定可靠,成本低廉,有着非常大的市场潜力。
[1]张丰华,韩宝玲,罗庆生.基于PLC的新型工业码垛机器人控制系统设计[J].计算机测量与控制,2009,17(11):2191-2193.
[2]侯辉.码垛机器人控制系统研究[D].郑州:郑州大学,2013:23-26.
[3]王占军.工业码垛机器人机械结构与控制系统的研究[D].淄博:山东理工大学,2015:44-48.
[4]李成伟,朱秀丽,贠超.码垛机器人机构设计与控制系统研究[J].机电工程,2008,25(12):81-84.
[5]余晓明.四自由度码垛机器人设计及其控制系统性能研究[D].成都:西南交通大学,2008:12-14
[6]刘兴磊.基于现场总线的码垛机器人控制系统研究[D].上海:东华大学,2010:17-19.
[7]李成伟,贠超.码垛机器人控制系统的设计与实现[J].机电产品开发与创新,2008,21(5):9-11.
[8]杨洋.码垛机器人嵌入式控制系统研究[D].南京:南京林业大学,2013:14-16.
[9]曹波,曹其新,陈培华.基于模块化设计的码垛机器人控制系统开发[J].机床与液压,2012,40(23):90-92.
[10]邹晓晖,王红州,陈润六.一种新型混联码垛机器人的设计与分析[J].制造业自动化,2016,38(11):91-94.
Study on Control System of A New Type of Hybrid Palletizing Robot
CHEN Run-liu1,ZHAO Feng-hui2,ZHENG Xiao-min1,WANG Hong-zhou1,ZOU Xiao-hui1
(1.Jiangxi Institute of Mechanical Science,Nanchang Jiangxi 330002,China;2.Jiangxi Modern Polytechnic College,Nanchang Jiangxi 330002,China)
This paper introduces the control system of a new type of hybrid palletizing robot,mainly expounds the control flow,the selection and design of hardware and software,the man-machine interface,etc..In the parallel part of the system,three electric cylinders are used as the executing mechanism,and the main shaft and the rotating shaft of the moving platform are composed of two motor and speed reducers.With the control method being“industrial personal computer+motion controller"mode,the motion controller uses STM32F4 Series MCU as the main chip.The operation shows that the system is safe,reliable,low cost,and has good market prospects.
hybrid;palletizing robot;STM32;electric cylinder
TP242.2
A< class="emphasis_bold">文章编号:1
1672-545X(2017)05-0069-03
2017-02-05
江西省科技支撑重大课题:一种新型混联码垛机器人的研发:(项目编号:20152ACE50009);江西省重大科技成果转移转化计划项目:基于并联机构的码垛机器人研发成果转移转化(项目编号:2016ACI90009)
陈润六(1987-),男,江西九江人,硕士,工程师,研究领域:机械装备的设计及制造研究,机器人控制系统研究。
