客车车道偏离报警系统性能测试与评价
2017-06-24徐建勋游国平丁良旭曹飞张仪栋王戡
徐建勋,游国平,丁良旭,曹飞,张仪栋,王戡
(重庆车辆检测研究院国家客车质量监督检验中心,重庆401122)
客车车道偏离报警系统性能测试与评价
徐建勋,游国平,丁良旭,曹飞,张仪栋,王戡
(重庆车辆检测研究院国家客车质量监督检验中心,重庆401122)
介绍国内外客车车道偏离报警系统的测试评价方法,并按照测试方法的要求,对某客车车道偏离报警系统性能进行测试和评价,最后提出有关建议。
客车;车道偏离报警系统;测评
据我国交通运输部统计,约有50%的交通事故是因为汽车偏离正常的行驶车道引起的,究其原因主要是驾驶员心神烦乱、注意力不集中或驾驶疲劳;根据联邦公路局(美国)的估计,美国2016年所有致命的交通事故中的44%跟车道偏离有关,同时车道偏离也被认为是车辆侧翻事故的主要原因。因此,开发及应用车道偏离报警系统对于提高车辆运行安全性、减少交通事故会起到重要作用。
1 LDWS工作原理及配装要求
车道偏离预警系统(LDWS)主要由显示组件、摄像头、控制器及方向传感器等组成。图1为LDWS视觉传感器的安装方式及系统工作的基本模式。当车道偏离系统开启时,摄像头会实时采集行驶车道的标识线,通过图像处理对连续或间隔车道线进行区块分段识别,并根据车道延展特性进行估算拟合,进而获得汽车在当前车道中的位置参数,当检测到汽车偏离车道时,传感器会及时收集车辆数据和驾驶员的操作状态,在检测到驾驶员未打转向灯而车辆偏离出车道后,由控制器通过声音、震动等方式给予驾驶员安全提醒。整个过程约在0.5 s内完成,进而保证为驾驶者提供更多的安全反应时间。
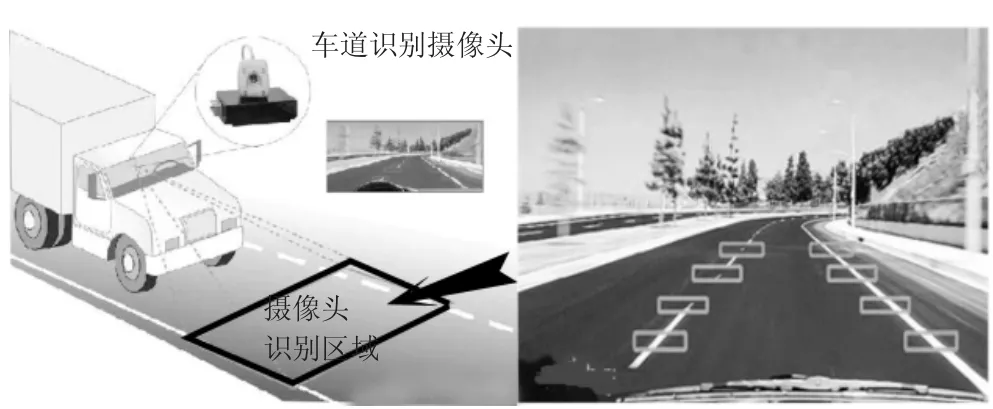
图1 车道识别模块及基本工作模式示意图
LDWS根据偏离报警的能力不同,通常分为两类:I类系统——能够在弯道半径≥500 m,且行驶速度≥20 m/s的情况下完成偏离报警功能;II类系统——能够在弯道半径≥250 m,且行驶速度≥17 m/s的情况下完成偏离报警功能[1]。由于弯道半径越小,图像识别难度越大,对系统要求越高,因此,在较小半径250 m弯道上的报警车速要求也相应降低。
鉴于LDWS对客车安全的重要作用,欧洲已于2013年11月起对M2类、M3类中的B级和Ⅲ级客车新申请认证车辆实施安装,2015年11月对新生产厂实施安装;日本于2015年7月要求高速公路客车必须安装;美国对所有客车虽未强制安装,但已将此项目列入NCAP评价范围内。随着我国对客车安全方面的重视程度不断提高,JT/T1094-2016[2]要求从2018年5月起,我国9 m以上营运客车应装备LDWS系统。随着标准的即将实施,我国各客车企业正在或即将开发装备有LDWS的客车;同时,为配合“中国客车安全评价规程”和“中国客车安全技术提升行动”,国家客车监督检验中心对某型客车LDWS的性能进行了测试和评价。
2 国内外测试方法
LDWS的主要功能是车辆行驶在偏离车道后发生报警,因此,目前国内外在考核LDWS的性能方面,主要从偏离报警成功率和最迟报警线位置两个方面进行测评。
2.1 国外测试方法
国外对于LDWS项目的测试评价方法已经比较成熟,主要针对各种车道线识别率和在固定偏离速度下报警位置进行测评。
1)ECE130-2013[3]:主要对LDWS的起动车速和偏离报警功能方面进行测试。同时,在其附录中对多种车道线类型进行了总结和覆盖,并要求系统能够对各种车道线进行有效识别。
2)ISO 17361-2007[4]:对于车辆LDWS的最迟报警线、最早报警线和非报警区域作了较完善的规定,提出了通过弯道报警产生测试、直道可重复性测试、虚警测试等试验方法对LDWS性能进行评价。
2.2 国内测试方法
随着对客车交通安全的越来越重视,近几年国内相关测试标准和测试方法也在不断发展。
1)GB/T 26773-2011:基于ISO 17361的测试评价方法,排除了对各国车道线的通用识别要求,对国内LDWS测试提供了检测依据。
2)JT/T 883-2014[5]:在GB/T 26773-2011的测试方法和测试规范的基础上增加了对多种车道线类型的识别能力要求和对多种光照条件下的车道线的识别能力要求,对各种干扰条件的剔除能力也提出了要求。相比GB/T26773-2011,JT/T883-2014要求更全面,更符合国内道路、环境条件,又切合道路运输管理部门的监管要求,但标准中对光照条件、脏污程度、干扰条件等具体测试指标没有做量化的规定。
3)JT/T1094-2016:基本采用了JT/T883-2014的要求。
3 测试评价
3.1 测评项目选取
JTG_D20-2006[6]、CJJ37-2012[7]是我国主要的道路工程规范(个别省份、地方标准除外),在道路设计规范中对于各等级路的中间带最小宽度、左侧路缘带最小宽度、右侧路肩宽度、应急车道宽度等指标都有明确的要求,见表1。
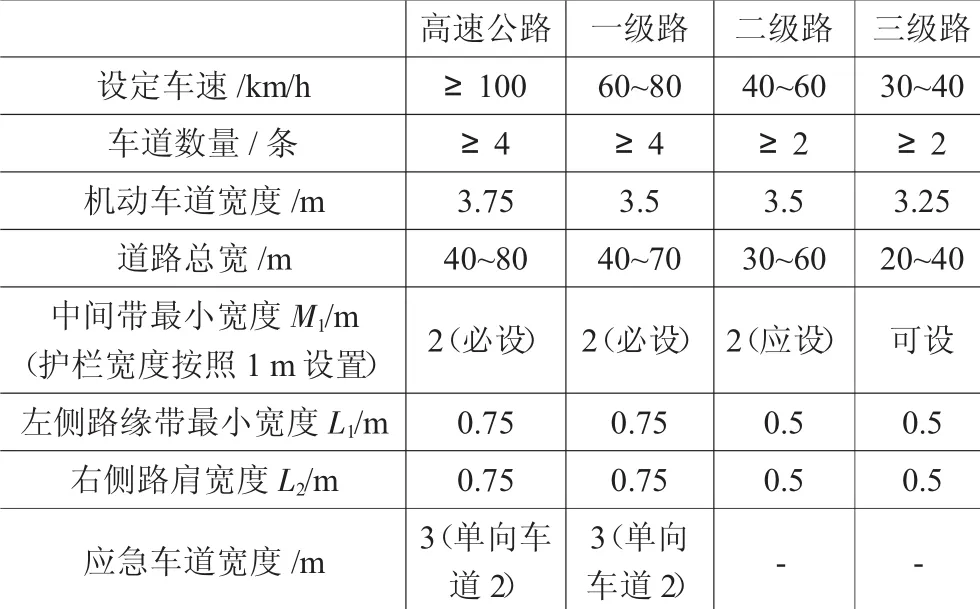
表1 道路设计规范(JTG_D20-2006;CJJ37-2012)
由表1可见,在容易引起群死群伤的中大型客车常用的高速公路及一级公路内,路面分隔带及路基宽度较为有限,左右侧车道距离护栏或道路边缘的最小宽度一般仅为0.75~1 m。当车辆冲出车道进而冲出路基时,形成恶性事故的可能性大增,因此,在非报警区域外,系统越早报警越能保障车辆行驶安全,以最迟报警线与车道之间的距离作为LDWS性能的主要评价指标是具有现实依据的。
LDWS的功能设置区域和报警线分布如图2所示,在试验项目上选取具有典型特征的直道可重复性测试、弯道报警产生测试、虚警测试3个项目,基本覆盖了国内外标准的典型测试项目,能够对LDWS进行较完善的评价。
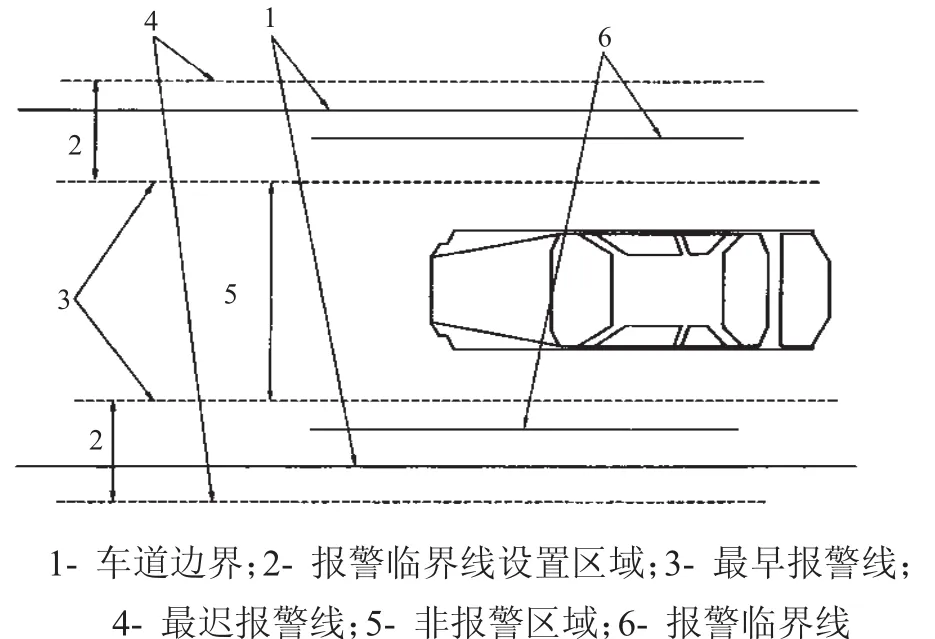
图2 报警临界线及功能设置区域示意图
3.2 测试及结果
测试所用主要设备为进口英国ABD SR150转向机器人、牛津RT 3002+RT base基站、声光报警采集系统,测试场地为重庆机动车强检试验场性能试验道路及动态广场(直径300 m)。测试车辆及设备安装如图3所示。

图3 测试车辆及设备安装
3.2.1 直道可重复性测试及结果
可重复性测试应在一段直线路段进行,车辆直行速度根据LDWS的类型进行选取,即I型取20~22 m/s,II型取17~19 m/s。车辆可沿着车道中央行驶,或靠近与车辆即将偏离越过车道标识相对的另一侧车道标识行驶。例如,如果将要向车道右侧偏离,左侧车辆可以沿着左侧的车道标识行驶,反之亦然,如图4所示。

图4 可重复性测试方法
当车辆按照指定速度沿着测试车道跟踪行驶并达到稳定状态后,车辆可向车道左侧和右侧逐渐横向偏离车道。当车辆横向偏离速度为0.1 m/s<(V1±0.05)≤0.3 m/s时,进行两组共8次测试,(第一组的4次向左偏离,第二组的4次向右偏离);当车辆横向偏离速度为0.6 m/s<(V2±0.05)≤0.8 m/s时,进行另外的两组共8次测试(第三组的4次向左偏离,第四组的4次向右偏离),即需要进行16次测试。
判定依据:测试系统可以记录报警时间,LDWS应在未越过最迟报警线(乘用车为0.3 m,商用车为1 m)之前发出报警(GB/T 26773-2011、ISO 17361);LDWS应通过单组四次试验中的3次试验,且通过共需16次试验中的13次试验(JT/T883-2014)。
另外,笔者提出以下判定原则,在非报警区域外,系统越早报警越能保障车辆行驶安全,因此,以偏离车道线最大值作为另一项评价指标,偏离值越小,代表LDWS的识别能力越高,系统工作越安全。
针对某客车的LDWS进行直道可重复性测试,图5是车辆在直道方向行驶速度为65 km/h,横向偏离速度分别为0.23 m/s和0.74 m/s两种工况下的LDWS报警信号和偏离距离的一次测试结果。图中偏离车道线距离曲线与报警信号曲线的交叉点对应为LDWS的报警时间点;报警时间点对应的左侧纵坐标为偏离车道线的距离;报警时间点与车辆内侧前轮偏离至车道线(纵坐标0点位置线)时刻的时间差为LDWS的报警反应时间。
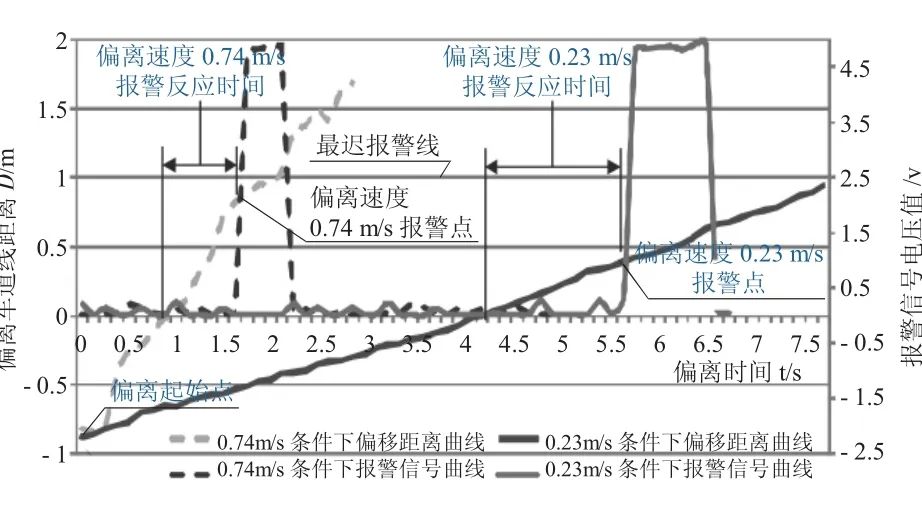
图5直道65 km/h时车道偏离报警信号及车道偏离距离结果
图6 为此客车LDWS进行的重复性测试项目中共16次测试结果分布散点图。由图5和图6可见,此客车报警线偏离距离未超过1 m,能够满足标准要求,但报警反应时间有的大大超过了0.5 s;随偏离速度的提高,报警反应时间明显缩短,其偏离车道线距离明显增大。由此可见,车辆横向偏离速度是LDWS评价的重要前提。
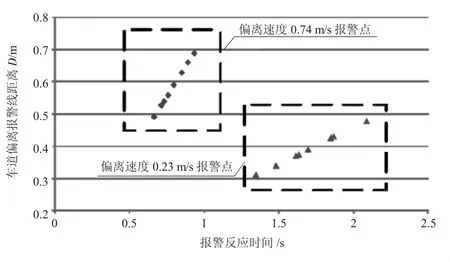
图6 直路可重复测试报警测试结果散点图
3.2.2 弯道报警产生测试及结果
测试开始时车辆应基本处于车道中央;当车辆进入测试车道跟踪行驶并达到稳定状态后,车辆可向弯道内侧或外侧逐渐偏离。车辆的弯道行驶速度根据LDWS类型选取,即I型取20~22 m/s(弯道半径500 m),II型取17~19 m/s(弯道半径250 m);车辆应在右转弯和左转弯两种情况下,在两种横向偏离速度范围(0.0~0.4 m/s和0.4~0.8 m/s)内,分别向左侧和右侧各偏离一次,可组合得到8种偏离情况,如图7所示。
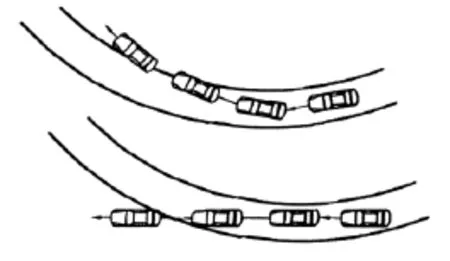
图7 报警产生测试方法
判定依据(GB/T 26773-2011、ISO 17361-2007):在每次测试中,系统应保证车辆在越过最早报警线后,未越过最迟报警线(乘用车为0.3 m,商用车为1 m)之前发出报警,每次均需成功,系统需记录报警时间。
对同一客车进行了LDWS弯道报警产生测试,表3是其在两种横向偏离速度的工况下LDWS弯道报警点的偏离距离D的测试结果。

表3 某客车LDWS弯道报警产生测试结果
3.2.3 虚警测试及结果
测试车道为直道,总长1 000 m(一段长1 000 m的直道或两段各长500 m的直道)。
判定依据(GB/T 26773-2011,JT/T 883-2014):当车辆在非报警区域(左右两条最早报警线之间)行驶时,系统应不发出报警。
试验客车在在虚警测试中未发生误报警,能够符合试验标准要求。
4 结束语
现阶段的LDWS测试方法主要是针对特定工况的试验道路和试验场景开展的;恶劣场景测试更多的是技术提供方进行内部研发测试,测试场景缺少相关的标准依据,还没有提出统一的评价指标。随着LDWS使用的进一步普及,其有效性和可靠性评价应该更加全面,因此,针对LDWS测评工况提出以下建议:
1)针对摄像头等传感器的安装环境(振动、高低温、湿度等环境)进行量化测试,从而减少因传感器脱落或失效造成的安全隐患。
2)针对雨、雪、雾、复杂光照条件、破损车道线等工况,进行独立零部件识别能力测试,进一步提升系统的安全性和可靠性。
3)针对山区、郊区等恶劣道路条件,进一步降低车道偏离报警初始行驶车速(现阶段LDWS初始报警车速为60~70 km/h),进一步提升客车运行安全性。
[1]全国智能运输系统标准化技术委员会.智能运输系统车道偏离报警系统性能要求与检测方法:GB/T 26773-2011[S].北京:中国标准出版社,2011:7.
[2]交通运输部运输服务司.营运客车安全技术条件:JT/T 1094-2016[S].北京:人民交通出版社,2016:12.
[3]ECE R130-2013 Uniform provisions concerning the approval of motor vehicles with regard to the Lane Departure Warning System(LDWS)[S].2013.
[4]ISO 17361-2007 Intelligent transport systems-Lane departure warning systems-Performance requirements and test procedures [S].2007.5.
[5]全国道路运输标准化技术委员会.营运车辆行驶危险预警系统技术要求和试验方法:JT/T 883-2014[S].北京:人民交通出版社,2014:4.
[6]中华人民共和国交通部.公路路线设计规范:JTG D20-2006 [S].北京:人民交通出版社,2006:7.
[7]住房和城乡建设部.城市道路工程设计规范:CJJ37-2012 [S].北京:中国建筑工业出版社,2012:1.
修改稿日期:2017-05-05
Test and Evaluation for the Performance of Coach Lane Departure Warning System
Xu Jianxun,You Guoping,DingLiangxu,CaoFei,ZhangYidong,WangKan
(ChongqingVehicle Test&Research Institute,National Bus and Coach QualitySupervision and Test Center,Chongqing401122,China)
The authors introduce the test and evaluation methods about the performance of coach lane departure waning system at home and aboard.According to the requirements of the test methods,then test and evaluate the performance ofa coach lane departure warningsystem.Last,theypresent some suggestions.
coach;lane departure warningsystem;test and evaluation
U469.1;U467.1
A
1006-3331(2017)03-0046-04
徐建勋(1979-),男,博士;高级工程师;主要从事检测设备开发及ADAS研发、测试评价工作。
