ECVT混合动力客车动力系统匹配计算
2017-06-24钱庆辉
钱庆辉
(厦门市福工动力技术有限公司,福建厦门361100)
ECVT混合动力客车动力系统匹配计算
钱庆辉
(厦门市福工动力技术有限公司,福建厦门361100)
对ECVT混合动力系统构型进行分析,介绍用等效杠杆原理分析行星轮系的基本方法,针对设计指标对10.5 m ECVT客车动力系统进行驱动电机、ISG电机、行星变速器、发动机和动力电池的参数匹配计算。
ECVT;混合动力客车;动力系统;匹配计算
1 系统构型分析
ECVT(Eletro-continuously Variable Transmission)系统构型如图1所示,发动机通过减振器与行星齿轮系行星架PC进行连接,ISG电机M1与行星轮系太阳轮S相连,驱动电机M2与行星轮系齿圈R相连,整个系统通过齿圈R连接后桥进行输出。
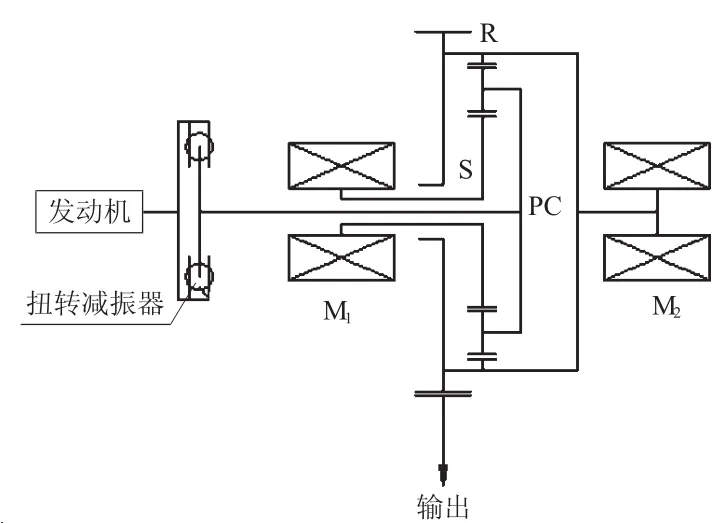
图1 ECVT系统构型图
对行星轮系进行运动和受力分析,常采用等效杠杆原理[2]。本文所述的ECVT系统,属于NGW(按齿轮啮合形式命名,N代表内啮合,W代表外啮合,G代表公用的行星轮)行星轮系,对于该种行星轮系,以行星架为参照物,齿圈和太阳轮始终转向相反,因此等效杠杆后,行星架和齿圈分别分布于各自的行星架两侧,三个元件的运动状态分别等效为各自杠杆上的点,设太阳轮的半径为RS,齿圈的半径为RR,令k=RR/RS,k实际上为行星轮系的传动比(以行星架为参照物),在等效图中为太阳轮轴到行星架的水平距离与齿圈到行星架水平距离的比值,设太阳轮的转速为NS,转矩为TS,齿圈的转速为NR,转矩为TR,行星架的转速(与发动机转速相同)为NPC,转矩为TPC。令k=RR/RS,则存在恒等式(1)、(2)、(3),


符合线性关系式(1)的受力点必在同一直线上,因此等效后的三轴图如图2所示。其中,各元件状态点在水平线(虚线)以上,转速为正,在水平线以下,转速为负,状态点的垂直受力和方向则代表该元件当前扭矩的大小和方向,三元件力矩关系满足状态方程式(2)和式(3)[3-4]。
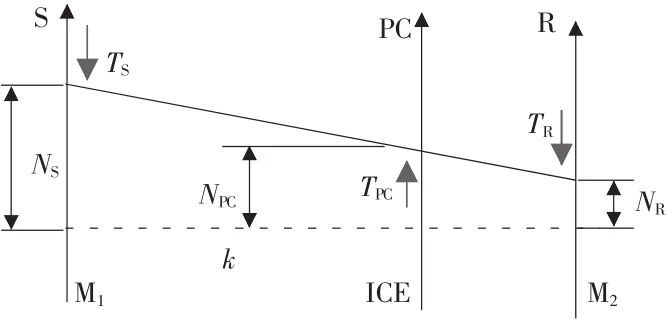
图2 等效杠杆图
2 动力系统参数匹配
动力系统的主要部件的合理匹配直接影响整车的动力性、经济性及生产成本。混合动力汽车具有多种工作模式,各部件根据需求按照控制策略进行组合工作,因此其动力系统的匹配也要结合不同的工作模式匹配[5-7]。本文设计的混合动力客车基本参数为:轮胎半径r=478 mm,整备质量m=10 500 kg,最大总质量M=163 00 kg,主减速比I0=6.14,迎风面积A=9 m2,风阻系数为0.65,滚动阻力系数f=0.008 5,传动效率ηt=0.93;性能要求为:最高车速100 km/h,纯电模式最高车速为70 km/h,纯电模式20 km/h最大爬坡度α≥12%,混动模式20 km/h最大爬坡度≥18%,纯电模式续航里程为50 km。
单行星排混合动力系统纯电动模式需要驱动电机单独驱动,发动机驱动需要ISG电机配合输出扭矩,因此在匹配时需考虑各部件相互之间的影响,系统匹配的流程图如图3所示。

图3 动力系统匹配流程图
2.1 驱动电机的匹配
进行整车动力系统匹配时,一般根据最大爬坡需求,匹配动力源的峰值扭矩需求,峰值功率匹配则受最高车速、爬坡和加速性能要求共同影响。整车进行最高车速或最大爬坡运行时可视为稳态工况,因此可以忽略变速器三元件(S,PC,R)转动惯量的影响。由于M2驱动电机与行星箱齿圈直接相连,可在发动机不起动的情况下,以纯电动模式驱动车辆,纯电动模式下的阻力平衡杠杆图如图4所示。

图4 纯电动模式下的阻力平衡图
由图4可以看出,电机M2需要满足纯电动模式下的最高车速和爬坡要求,根据设计要求,整车纯电动模式坡道起步能力不小于12%,纯电动最高车速为70 km/h,结合式(4),可计算出该状态下电机的峰值需求扭矩为1 734 N·m。

由于驱动电机与齿圈转速始终相同,根据设计要求,最高车速为100 km/h,结合式(5),带入相关参数,可计算出该状态下电机的峰值需求转速为3 407 r/min。
近年来,随着各项工作的逐步展开,遵医附院新技术新项目开展数量逐年提升,年均开展新技术新项目数量从20余项增加到现在的200余项,通过在临床诊疗过程中不断创新、突破,并积极促进临床科研项目实现成果转化,有效助推了医院科研工作水平实现跨越式发展,极大提升了医院的综合实力和市场竞争力。

通过式(4)和式(5)可求出不同工况要求下电机M2的特性需求,如表1所示,需求功率P可通过下式进行计算:P=T·n/9 550

表1 M2电机特性参数需求
根据表1,选定电机M2的峰值扭矩为2 000 N·m,峰值功率为140 kW,最高转速为3 500 r/min。
2.2 变速器传动比选择
由图4可知,变速器传动比即k值越大,ISG电机最高转速要求越高,永磁同步电机需要弱磁控制,转速不宜过高。本文根据常用电机类型,设定ISG电机最高转速为8 500 r/min,根据表1计算结果,结合图4纯电动杠杆平衡图,ISG电机最高转速应小于纯电模式最高车速下ISG的空转最高转速,因此传动比应满足k<8 500/2 385=3.56。结合常用行星器传动比,本文选定行星变速器传动比为k=3.22,若发动机的最高转速为2 300 r/min,由于NPC等于发动机转速,Nr等于变速器输出轴转速3 407 r/min,NS等于ISG电机转速,混动模式100 km/h时,由式(1)可得,ISG的最高转速NS需求为2 300×(1+3.22)-3407×3.22=-1 265 r/min(负号表示ISG电机转速与变速器输出转速旋转方向相反),此时ISG电机处于驱动状态,与发动机一同提供整车需求功率[6-7]。
2.3 发动机的匹配
发动机的性能参数需满足混动模式下的最高车速和最大爬坡度要求,结合式(4)和式(5),代入相关参数,可计算出混动模式下变速器输出需求如表2所示,混动模式下的阻力平衡图如图5所示。
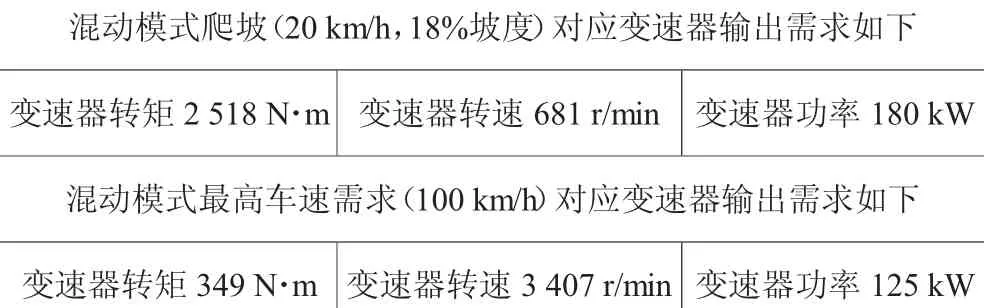
表2 变速器输出需求
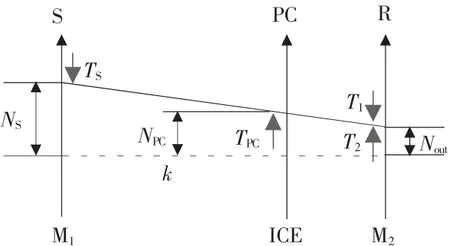
图5 混动模式下的阻力平衡图
由表2可知,混动模式最大爬坡需求的峰值扭矩为T1=2 518 N·m,而由2.1节可知,电机的峰值扭矩为T2=2 000 N·m,此时,驱动力由发动机和驱动电机共同提供,如图5所示,短黑色箭头为等效杠杆的受力方向,由杠杆平衡可得(T1-T2)=k×TS,TS+(T1-T2)=TPC,所以发动机扭矩应大于(T1-T2)/(k/(k+1))=(2 518-2 000)/(3.22/4.22)=679 N·m。混动模式下高速行驶时,整车需求功率优先由发动机提供,排除电系统效率损失,由表2可知,发动机的需求功率至少应满足变速器的输出功率需求,即应大于125 kW。综上分析,选择发动机最大功率147 kW,最大扭矩700 N·m。
2.4 ISG电机的匹配
ISG电机主要负责在混动模式下平衡杠杆,负责维持发动机的扭矩输出,由于发动机的最大扭矩Temax=700 N·m,结合式(2)和式(3),ISG的最大发电扭矩应大于Temax×(1/(1+k)=700×(1/4.22)=166 N·m,且由2.2节可知,ISG电机的最大转速为8 500 r/min。
2.5 动力电池的匹配
动力电池除了自身充放电功率需要满足电机的峰值使用功率外,还需要满足中续驶里程要求。参照文献[8]中的试验方法,整车试验载荷按装载质量的65%计算,整车40 km/h匀速行驶的平均功率需求可按式(4)、式(5)和式(6)联合估算出,代入相关参数,可得平均需求功率为20.2 kW,所以按50 km纯电续航里程要求,所需匹配电池电量为50/40×20.2=25.3kW·h。假设整车高压平台为500 V,则电池容量至少为25.3×1 000/550=50.6 Ah。
综上选择各部件的主要参数如下,发动机峰值扭矩700 N·m,峰值转速2 300 r/min,峰值功率147 kW;驱动电机峰值功率140 kW,峰值扭矩2 000 N·m,峰值转速3 500 r/min;ISG电机峰值功率60 kW,峰值扭矩200 N·m,峰值转速8 500 r/min;动力电池容量50 Ah,电池组额定电压504 V。
3 结束语
本文根据设计要求,对ECVT混合动力系统进行了主要部件的参数匹配,对满足性能要求下的有关部件的特性参数进行了匹配计算。下一步将针对不同的行驶工况对该系统的控制方式进行分析,并将根据匹配后的各部件参数进行具体控制策略设计,对该系统进行动力性和经济性仿真及台架试验分析。
[1]陈全世.先进电动汽车技术[M].2版.北京:化学工业出版社. 2013.
[2]纪峻岭,齐晓杰,朱荣福.丰田混合动力汽车驱动系统结构分析及性能研究[J].内燃机,2007(6):4-7.
[3]汪东坪.深度混合动力汽车整车系统控制技术研究[D].南京:南京航空航天大学.2013.
[4]王晨,郭明林,刘国志.新型功率分流混合动力汽车的动力性优化[J].华南理工大学学报,2015,43(11):96-104.
[5]王晓闯.混合动力客车用双排行星齿轮机构研究[D].成都:西南交通大学.2014.
[6]赵晓静,武一民,王海霞.丰田PRIUS混合动力传动系统分析与建模[J].机械传动,2010,34(6):31-35.
[7]陈雪荣,吴新兵,何仁,等.城际混合动力客车动力系统参数匹配及耗能特性影响因素分析[J].公路与汽运,2016(3):1-6.
[8]全国汽车标准化技术委员会.电动汽车能量消耗率和续驶里程试验方法:GB/T18386-2005[S].北京:中国标准出版社, 2015:7.
修改稿日期:2017-03-10
Matching Calculation of Powertrain on an ECVT Hybrid Bus
Qian Qinghui
(Xiamen FuGongEVTech Co.,Ltd,Xiamen 361100,China)
This paper analyzes the structure ofthe ECVThybrid powertrain,introduces the basic methods of equivalent lever principle on analyzingplanetarygear train.It alsomatches and calculates the parameters ofthe drive motor,ISG motor,planetarygearbox,engine and power batteries ofa 10.5 m ECVT bus powertrain aiming at the design indexes.
ECVT;hybrid bus;powertrain;matchingcalculation
U469.7;U464
A
1006-3331(2017)03-0013-03
钱庆辉(1989-),男,工程师;主要从事新能源客车动力系统控制与试验研究工作。
