C6H水平井三维轨迹优选与控制技术
2017-06-23崔爱贞和鹏飞袁则名
边 杰, 崔爱贞, 和鹏飞, 袁则名, 齐 斌
(1.中海油能源发展股份有限公司工程技术分公司,天津 300452; 2.中海油服油田技术事业部塘沽作业公司,天津 300452; 3.中海油服钻井事业部钻井研究院钻井工艺研究所,天津 300452)
C6H水平井三维轨迹优选与控制技术
边 杰1, 崔爱贞2, 和鹏飞1, 袁则名1, 齐 斌3
(1.中海油能源发展股份有限公司工程技术分公司,天津 300452; 2.中海油服油田技术事业部塘沽作业公司,天津 300452; 3.中海油服钻井事业部钻井研究院钻井工艺研究所,天津 300452)
渤海北部LD油田在井网加密、油田大规模综合布置新钻调整井时,存在新钻的25口井与老井井网交叉、井眼轨迹立体三维缠绕问题,其中C6H水平井是此类问题的典型,同时C6H井还需要在可钻性极差的馆陶组底砾岩地层定向造斜。针对上述问题,通过C6H井3种轨迹方案对比、分析,优选出最为有利的方案,结合螺杆马达和旋转导向工具性能分析,最后采用螺杆马达+水力震荡器+微偏心稳定器等钻具组合新方式,顺利实施了C6H井。
水平井;井网加密;井眼防碰;三维设计;轨迹控制;渤海油田
渤海油田现阶段开发中,零散调整井和整装规模的综合调整井较多,前者属于油田范围内的局部井网调整,后者属于全油田范围的井间加密,此类作业中井眼防碰问题是最为棘手的问题[1-8]。近年来渤海油田进行了较多的井眼防碰研究,出台若干管理办法,形成了老井陀螺油管内复测等一系列技术措施,但主要的手段还是集中在井眼轨迹设计阶段的规避和控制[9-12]。LD油田位于渤海北部,目的层位于东营组,在2014年进行了井网加密,累计钻井25口,井眼防碰问题较为突出,尤其是C6H井最为典型。
1 作业背景
1.1 初始轨迹设计
C6H井在初步研究阶段,轨迹设计如表1所示,该井设计为一口水平生产井,采用两段式造斜,方位角变化较大,属于典型的三维水平井。
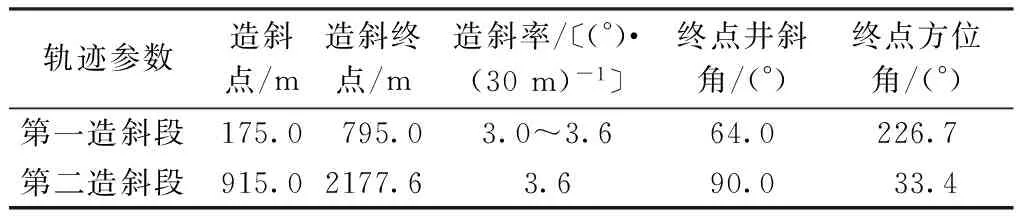
表1 C6H井初始轨迹设计
注:井底垂深1548.8 m,井底斜深2448.0 m。
1.2 井身结构
C6H井采用渤海通用三开井身结构,Ø444.5 mm井眼(钻深805.0 m)×Ø339.7 mm套管(下深800.0 m)+Ø311.1 mm井眼(钻深2177.0 m)×Ø244.5 mm套管(下深2172.0 m)+Ø215.9 mm井眼(钻深2448.0 m)×防砂筛管(下深2443.0 m)。
1.3 地层情况
在轨迹控制过程中分别穿过平原组、明化镇组、馆陶组和东营组地层,其中在馆陶组地层底部还有可钻性比较差的底砾岩。
2 难点分析
综合分析本井初始设计轨迹以及与周围临井的防碰扫描图(见图1),可以看出C6H井的难点主要有以下几点:(1)严重的浅层防碰问题:在175.0~500.0 m间存在多井的浅层防碰;在1180.0 m附近与A26H井的防碰以及深层防碰问题。(2)轨迹复杂,控制难度大:设计轨迹扭方位239.88°;因靶前位移不足,轨迹存在反扣,井斜由64.03°降至25.44°再增至90°;轨迹存在增斜降方位段、降斜增方位段和增斜增方位段。(3)一开在浅部软地层存在造斜且造斜率达到3.6°/30 m,而渤海常规设计为3.0°/30 m,主要是地层疏松造斜较为困难。(4)二开主要问题是防碰、减少或避开底砾岩的滑动作业;本作业区块馆陶组地层中有底砾岩,在底砾岩使用马达滑动存在工具面不稳定,时效较低的问题;设计轨迹中,斯伦贝谢旋转导向Xceed存在工作盲区——避开其工作盲区[13]。

图1 初始设计防碰扫描中心距图
3 设计优化与方案对比
3.1 优化设计
C6H井在一开作业结束后,利用陀螺工具在表层套管内进行了轨迹复测,有效保证了上部数据的准确度。根据最新的复测结果,形成了2个二开优化设计方案(主要是针对800.0 m以深的井段轨迹设计),如表2所示。

表2 C6H井优化设计方案
注:方案1和方案2的井底垂深均为1548.8 m,方案1的井底斜深2442.0 m,方案2的井底斜深2443.0 m。
3.2 方案对比
(1)分析优化设计1,有如下特点:针对防碰做出了优化,与A26H井的分离距离和分离系数都比之前更加安全,如图2所示;底砾岩垂深预计在1180~1250 m,在其中有一个33.70 m的稳斜段,稳斜角设计为30.39°;防碰优化后,直接使用PDC钻头,无需使用牙轮钻头。一是提高了钻井速度;二是避免穿过底砾岩后的起钻更换钻头,提高了作业时效。底砾岩中的稳斜段,有利于实钻轨迹的模拟;可以减少底砾岩中的滑动距离,提高了作业时效;同时,模拟的轨迹更贴近设计,有利于控制轨迹和着陆。

图2 优化设计1防碰系数
(2)分析优化设计2,具有如下特点:防碰形势更加有利于工程实施,如图3所示,根据防碰报告A26H井位于C6H井右上方,C6H井斜深1148 m时与A26H井中心距离41.81 m,分离系数1.98,垂差14.3 m。A36井位于C6H井右上方,C6H井斜深1768 m时与A36井中心距离42.84 m ,分离系数1.77,垂差17.33 m。A9井位于C6H井右上方,C6H井斜深2016 m时与A9井中心距离35.77 m,分离系数1.68,垂差15.29 m。C6H井下部井段使用斯伦贝谢Xceed着陆,因设计钻穿底砾岩后部分井段是Xceed的工作盲区,故在轨迹优化过程中也尝试规避。限于靶点和轨迹的实际情况,无法规避,故需要钻进至无Xceed盲区后,才能更换旋转导向;根据地磁场参数,计算本井盲区警告区:同时满足井斜角范围21.85°~41.85°、方位角范围342.2°~2.2°;本井根据井眼轨迹和钻具表,需要钻进至斜深1715 m后,出Xceed盲区警告区。

图3 优化设计2防碰系数
(3)对比上述2个方案可知,优化设计1虽然做了诸多优化,但仍存在如下问题:①3.8°/30 m左右造斜率的井段长度>600 m;②二开轨迹除底砾岩有稳斜段外,使用螺杆马达控制轨迹要求严格,需要一直进行滑动作业,轨迹调整余地小;③钻出表层套管鞋就需要3.6°/30 m的造斜率,尝试马达钻具组合造斜率的井段余量极小;④相对初始设计与A36井的防碰形势有所加重。因此优选设计2为实施方案。
4 现场轨迹控制
4.1 螺杆马达控制井段(805~1715 m)
(1)钻具组合[14-15]。Ø311.1 mm钻头+Ø244.5 mm螺杆马达(1.25°,308/273 mm直翼扶正套子)+Ø203.2 mm浮阀接头+Ø229.1 mm稳定器+Ø203.2 mm非磁钻铤+Ø203.2 mm MWD+Ø203.2 mm非磁钻铤+Ø203.2 mm随钻震击器+变扣接头+Ø127 mm加重钻杆×14根+Ø203.2 mm水力振荡器+Ø127 mm钻杆。
(2)控制参数。滑动钻进钻压20~60 kN,排量3000~3600 L/min,旋转钻进钻压10~60 kN,排量3000~3800 L/min,顶驱转速50~70 r/min。
(3)技术分析。①使用PDC钻头,提高钻速即提高时效,钻头为新速通(旧)STS917 型, 10个直径15/32 in(1 in=25.4 mm)水眼;②为保证有足够的造斜率,使用1.25°弯角、型号为7LZ244×7.0-Ⅷ-SF 的5级螺杆马达;③参考本区块临近井的扶正器的使用效果,再综合考虑本井上部模拟轨迹主要是降斜扭方位,本井选用有利于轨迹控制的Ø229.1 mm稳定器;④工具面的稳定性对马达的造斜率的稳定性有决定性的影响,在钻具组合中加入了水力振荡器,既提高工具面的稳定性,又在一定程度上保证了足够的造斜率,使用水力振荡器,本井在底砾岩的滑动效率比C3H井的滑动有了明显的提升,相同钻井参数,底砾岩可钻性最差时,C3H井底砾岩滑动平均ROP在3~5 m/h,本井为6~8 m/h;在C6H井马达滑动作业中,基本没有出现憋泵憋压现象。
4.2 旋转导向控制井段(1715~2157 m)
(1)钻具组合。Ø311.2 mm钻头+Ø228.6 mm Xceed旋转导向工具+Ø209.6 mm LWD+Ø209.6 mm MWD+Ø203.2 mm非磁钻铤+Ø203.2 mm随钻震击器+变扣接头+Ø127 mm加重钻杆×14根+微偏心稳定器+Ø127 mm钻杆。
(2)控制参数。钻压20~60 kN,排量3600~3800 L/min,转速80~110 r/min。
(3)技术分析。本趟钻轨迹控制的重点是参考Xceed在本平台已作业井中的使用情况,尽快确定工具的指令及其对应的造斜率,本平台C19H、C3H井使用相同规格的Xceed,根据报告可知:造斜力度80%,造斜率约4.2°/30 m,造斜力度60%,造斜率约3.5°/30 m,造斜力度40%,造斜率在(2.2°~2.8°)/30 m。C6H井作业中,旋转导向工具Xceed发送导向指令,控制工具面角在36°,使用70%的造斜力度,最终效果能达到3.7°/30 m的造斜率,而使用0°工具面角、80%造斜力度,能达到造斜率4.4°/30 m,此时,方位角每柱自然右飘0.8°左右。同样工具面角情况下,使用60%造斜力度时能达到3.6°/30 m造斜率,使用40%~50%造斜力度时,造斜率(3°~3.3°)/30 m。
5 结论
(1)LD区块馆陶组、东营组地层采用水力振荡器+1.25°弯角马达,保证了造斜率,也保证了滑动作业的效果,避免在底砾岩和东营组地层出现频繁憋泵等现象;(2)更好的轨迹设计要求合理的稳斜段及其所稳的井斜、避开或减少特殊地层的滑动、避开部分工具如Xceed等的工作盲区;(3)定向井轨迹优化的手段:增加合理的稳斜段、优化造斜点、调整靶点、优化造斜率等。
[1] 孙晓飞,韩雪银,和鹏飞,等.防碰技术在金县1-1-A平台的应用[J].石油钻采工艺,2013,35(3):48-50.
[2] 韩志勇.三维定向井轨道设计和轨迹控制的新技术[J].石油钻探技术,2003,31(5):1-3.
[3] 孙文博,刘明国,王琪.三维绕障水平井轨迹控制技术在红南平6井的应用[J].断块油气田,2007,14(3):63-65.
[4] 和鹏飞,孔志刚.Power Drive Xceed指向式旋转导向系统在渤海某油田的应用[J].探矿工程(岩土钻掘工程),2013,40(11):45-48.
[5] 姬洪刚,卓振洲,张雪峰,等.渤海某油田利用模块钻机调整井钻井作业的难点与对策[J].科技创新与应用,2014,23(6):77-78.
[6] 刘鹏飞,和鹏飞,李凡,等.欠位移水平井C33H井裸眼悬空侧钻技术[J].石油钻采工艺,2014,36(1):44-47.
[7] 刘鹏飞,和鹏飞,李凡,等.Power Drive Archer型旋转导向系统在绥中油田应用[J].石油矿场机械,2014,43(6):65-68.
[8] 和鹏飞,吕广,程福旺,等.加密丛式调整井轨迹防碰质量控制研究[J].石油工业技术监督,2016,32(6):20-23.
[9] 付建民,韩雪银,孙晓飞,等.PDC钻头防涡技术在砾岩地层中的应用[J].石油钻采工艺,2012,34(S1):5-8.
[10] 刘鹏飞,和鹏飞,李凡,等.Power DriveVorteX钻具系统配套PDC钻头优化设计[J].长江大学学报(自科版),2014,11(16):41-42.
[11] 牟炯,和鹏飞,侯冠中,等.浅部大位移超长水平段I38H井轨迹控制技术[J].探矿工程(岩土钻掘工程),2016,43(2):57-59.
[12] 和鹏飞,侯冠中,朱培,等.海上Ø914.4 mm井槽弃井再利用实现单筒双井技术[J].探矿工程(岩土钻掘工程),2016,43(3):45-48.
[13] 边杰,和鹏飞,朱培,等.渤海常用旋转导向系统造斜率影响因素分析[J].船海工程,2016,45(S1):210-213.
[14] 陈虎,和鹏飞.密集交叉井网井眼轨道精确制导技术的应用[J].探矿工程(岩土钻掘工程),2017,44(1):41-45.
[15] 和鹏飞.海上低成本侧钻调整井的可行性研究与实施[J].海洋工程装备与技术,2016,3(4):212-216.
Three Dimension Trajectory Optimization and Control Technology for Unconventional Well Construction in Bohai
BIAN Jie1, CUI Ai-zhen2, HE Peng-fei1, YUAN Ze-ming1, QI Bin3
(1.CNOOC EnerTech-Drilling & Production Co., Tianjin 300452, China; 2.COSL, Well Tech, Tanggu Operation Company, Tianjin 300452, China; 3.COSL Drilling R&D Institute Drilling Technical Research Unit, Tianjin 300452, China)
For well pattern infill and large-scale comprehensive arrangement of newly drilled adjustment wells in LD oilfield of northern Bohai, 25 new wells cross with old well pattern and three-dimensional winding of borehole trajectory result in all the wells are three-dimensional designed with serious wellbores crossing problem, the typical case is C6H horizontal well which should be directional deflecting drilled in the Guantao formation basal conglomerate layer with extremely poor drillability. Aiming at the above, through the comparison and analysis on 3 kinds of trajectory scheme for C6H, the most favorable design is optimized; combined with the performance analysis on the screw motor and rotary steerable tools, new mode of DHA with screw motor + hydro-oscillator + micro eccentric stabilizer is adopted, C6H has been smoothly completed.
horizontal well; pattern infilling; anti-wellbore cross; 3D design; trajectory control; Bohai oilfield
2016-07-05;
2017-03-10
边杰,男,汉族,1984年生,工程师,从事海洋石油钻井技术监督与管理工作,bianjie@cnooc.com.cn。
和鹏飞,男,汉族,1987年生,工程师,从事海洋石油钻完井技术监督工作,天津市滨海新区中新生态城双威悦馨苑4-301(300467),hepf2@qq.com。
P634.7;TE243
B
1672-7428(2017)05-0024-03