Buck变换器的控制及补偿网络设计
2017-06-23钱叶册许卫兵时国平
钱叶册,许卫兵,时国平,孙 佐
(池州学院 机电工程学院,安徽 池州 247000)
Buck变换器的控制及补偿网络设计
钱叶册,许卫兵,时国平,孙 佐
(池州学院 机电工程学院,安徽 池州 247000)
为了保证Buck变换器输出电压稳定以及在电压、负载扰动情况下的动态性能良好,建立合理的数学模型和补偿网络是关键.利用状态空间平均法建立Buck变换器电感电流连续模式下的数学模型,确定了系统的状态空间表达式及传递函数,设计了闭环控制系统小信号模型,建立了输入电压扰动和负载电流扰动对输出电压影响的关系式,所设计的补偿网络采用的是PID补偿器.通过仿真验证了所设计的Buck变换器数学模型和闭环控制的合理性.
Buck变换器;小信号模型;补偿网络
当今社会电力电子技术得到迅速发展,DC-DC直流开关电源已在各行各业中得到广泛应用,但由于使用环境的影响,电源系统经常受到负载电压等外在因素的干扰,会导致输出电压不稳定或者动态响应效果不太好,影响正常的生产和生活.因此,如何建立合理的数学模型,对其进行稳态、动态分析并建立闭环控制系统和补偿网络显得尤为重要[1-3].
1 Buck变换器主电路模型
Buck变换器是一种DC-DC降压变换器,其原理(见图1).当开关管Q开通时,电源向电阻R、电感L和电容C供电,电感L和电容C中储存能量;当开关管Q关断时,电感L释放能量,向负载供电,同时给电容C反向充电.因此,Buck变换器通过控制开关管Q的开通与关断,来控制输出电压vo的大小[3].
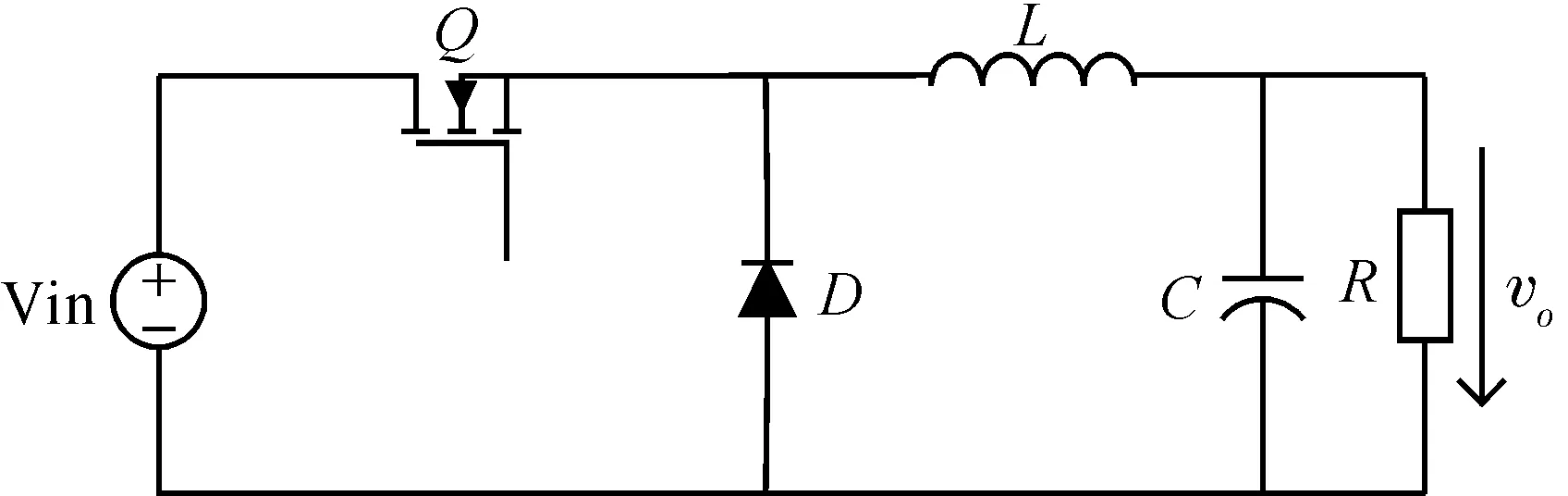
图1 Buck变换器原理图
现利用状态空间平均法来建立在电感电流连续模式下的Buck变换器主电路模型.
由图1可知,Buck变换器分别工作在开关管导通或关断两个状态.所对应的两种状态方程.
开关管导通时状态方程为:
(1)
式中,iL(t)—电感电流;vin(t)—Buck变换器输入电压;vo(t)—输出电压.
开关管导通时输出方程为:
(2)
式中,ig(t)—电压源的输出电流.
开关管断开时状态方程为:
(3)
开关管断开时输出方程为:
(4)
2 电压模式控制闭环系统分析
Buck变换器电压模式控制的小信号模型[4-5](见图2).
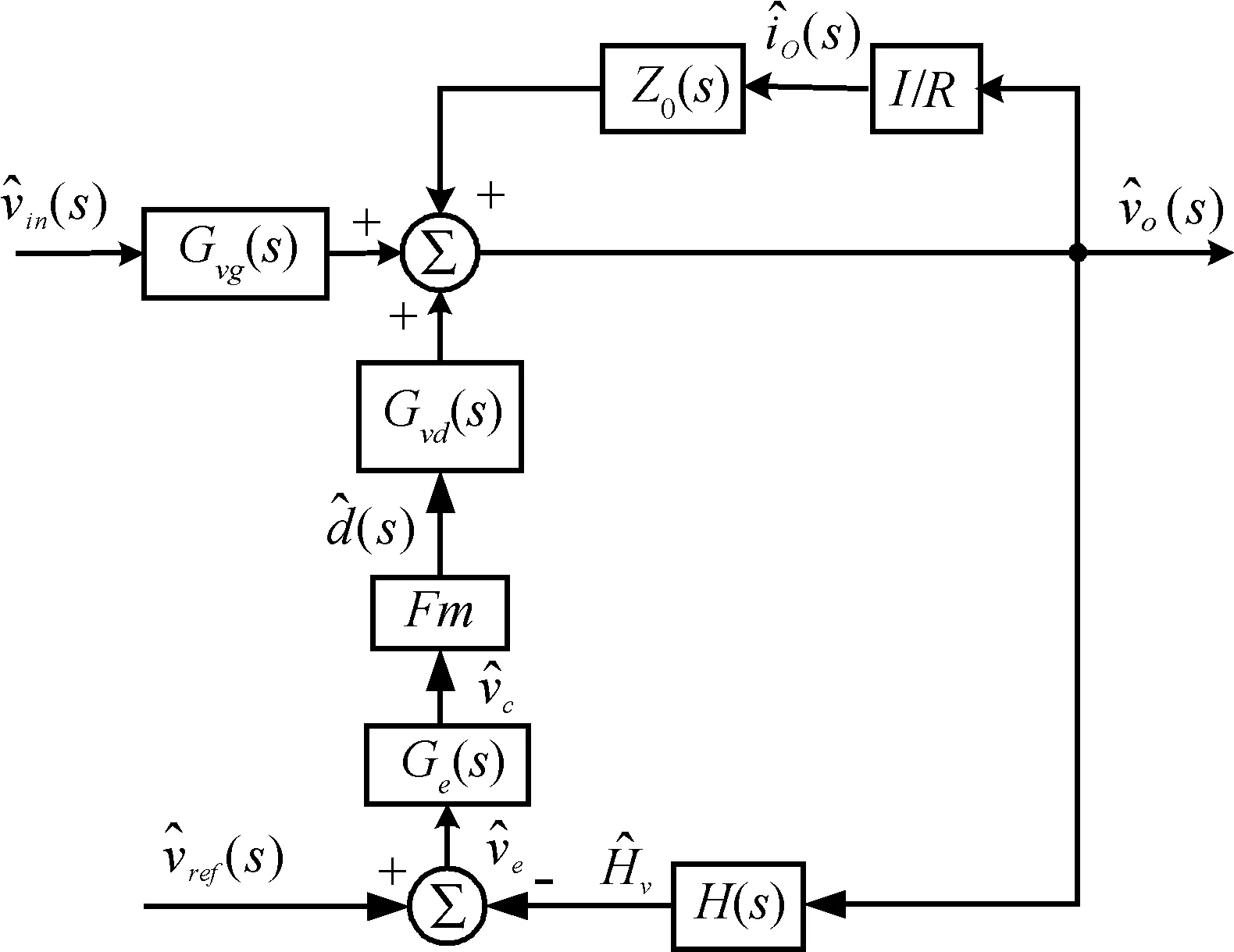
图2 Buck变换器电压模式控制的闭环系统小信号模型
图2中,Buck变换器采用闭环控制模式,当输入电压vin(t)和负载电流io(t)发生扰动时,通过调节占空比d(t),使输出电压维持恒定.Gvd(s)表示占空比对输出电压的控制的传递函数;Gvg(s)表示输入电压扰动对输出电压控制的传递函数;Zo(s)为开环输出阻抗,可调整负载电流扰动对输出电压的影响.
Buck变换器的输出电压vo(t)与输入电压vin(t)、负载电流io(t)和占空比d(t)之间存在函数关系,其表达式为:

(5)
式中,T(s)为开环增益,T(s)=H(s)Gc(s)Gvd(s)Fm.
由式(5)可知,引入反馈控制后,输入电压扰动与输出电压之间的关系式为:
(6)
则负载电流扰动与输出电压之间的关系式为:
(7)
3 补偿网络设计
PID补偿网络是按系统误差信号的比例、积分和微分进行控制,具有结构简单、参数易于调整和根据经验在线调整PID各参数等优点.在Buck变换器数字控制系统中,数字PID调节的修正与改进更为方便.因此,本文的电流控制项补偿网络采用的是PID补偿器.Buck变换器补偿网络[6](见图3).

图3 Buck变换器补偿网络
由图3可知,Buck变换器补偿前开环传递函数To(s)为:
To(s)=H×Fm×Gvd(s)=
(8)
采用的PID补偿网络的传递函数可表示为:
(9)

设补偿后的相位裕度φm=60°,则PID补偿网络的参数计算值为:



零点角频率 ωz=2πfz=131.88 kHz
极点角频率ωp=2πfp=1 902.84 kHz
倒置零点角频率ωL=2πfL=25.12 kHz
根据上面计算数据,得出补偿网络的传递函数为:
(10)
用PID补偿网络作为控制器后,得到补偿后的系统开环传递函数为:
(11)
补偿前开环传递函数波特(见图4),相位裕量φm≈7.7°.当系统中的参数发生变化时,系统会变得不稳定.补偿后开环传递函数波特图(见图5),补偿后提高了系统的相位裕量和穿越频率,因此补偿后系统稳定性及动态性都得到了改善[7-8].
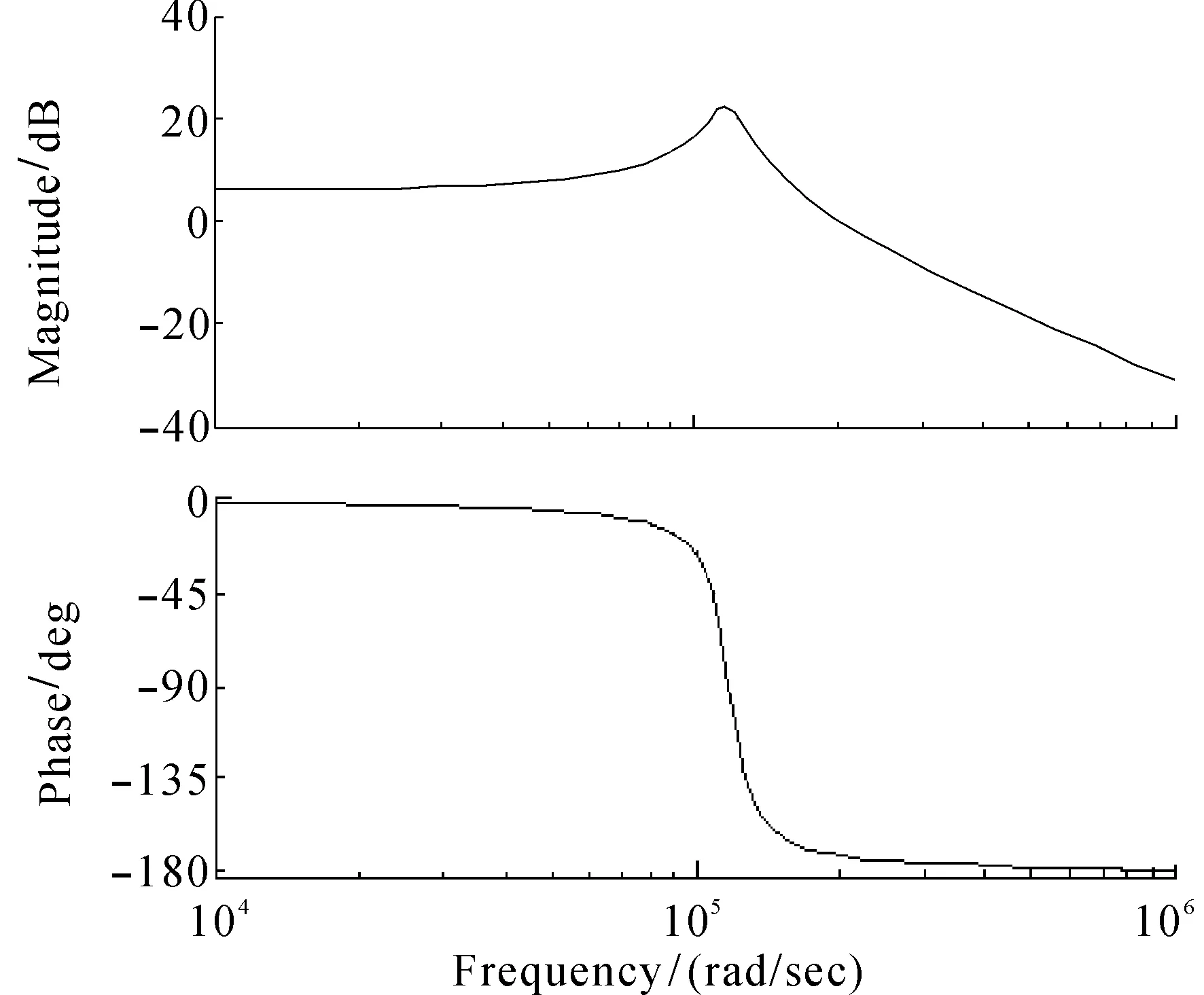
图4 补偿前开环传递函数波特图
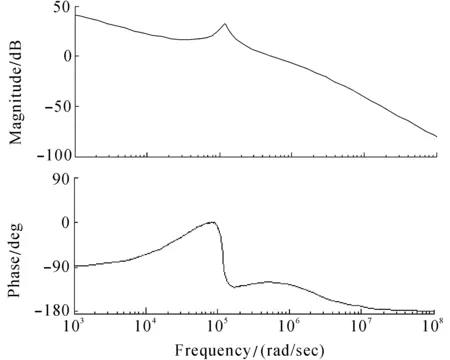
图5 补偿后开环传递函数波特图
4 仿真分析
针对实际情况,模拟了电源电压的波动和负载扰动对DC-DC变换器的稳定运行也有影响.Buck变换器在输入电压跃变时的输出电压动态响应(见图6),Buck变换器负载扰动时的输出电压动态响应(见图7).
当输入电压从15 V跃变为19 V时,由图6(a)可知,传统控制模式下,输出电压的超调量为1.12 V,恢复时间约为3 ms;由图6(b)可知,在电压控制模式下,输出电压的超调量降低到0.5 V,恢复时间降低到0.3 ms,系统在电压扰动下的动态性能得到明显改善.
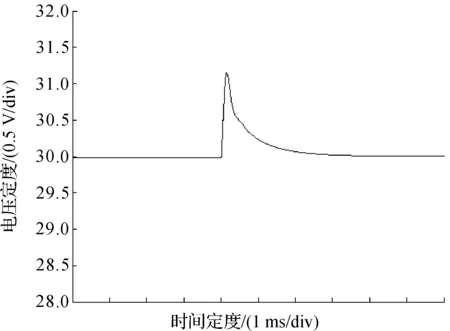
(a)传统控制模式
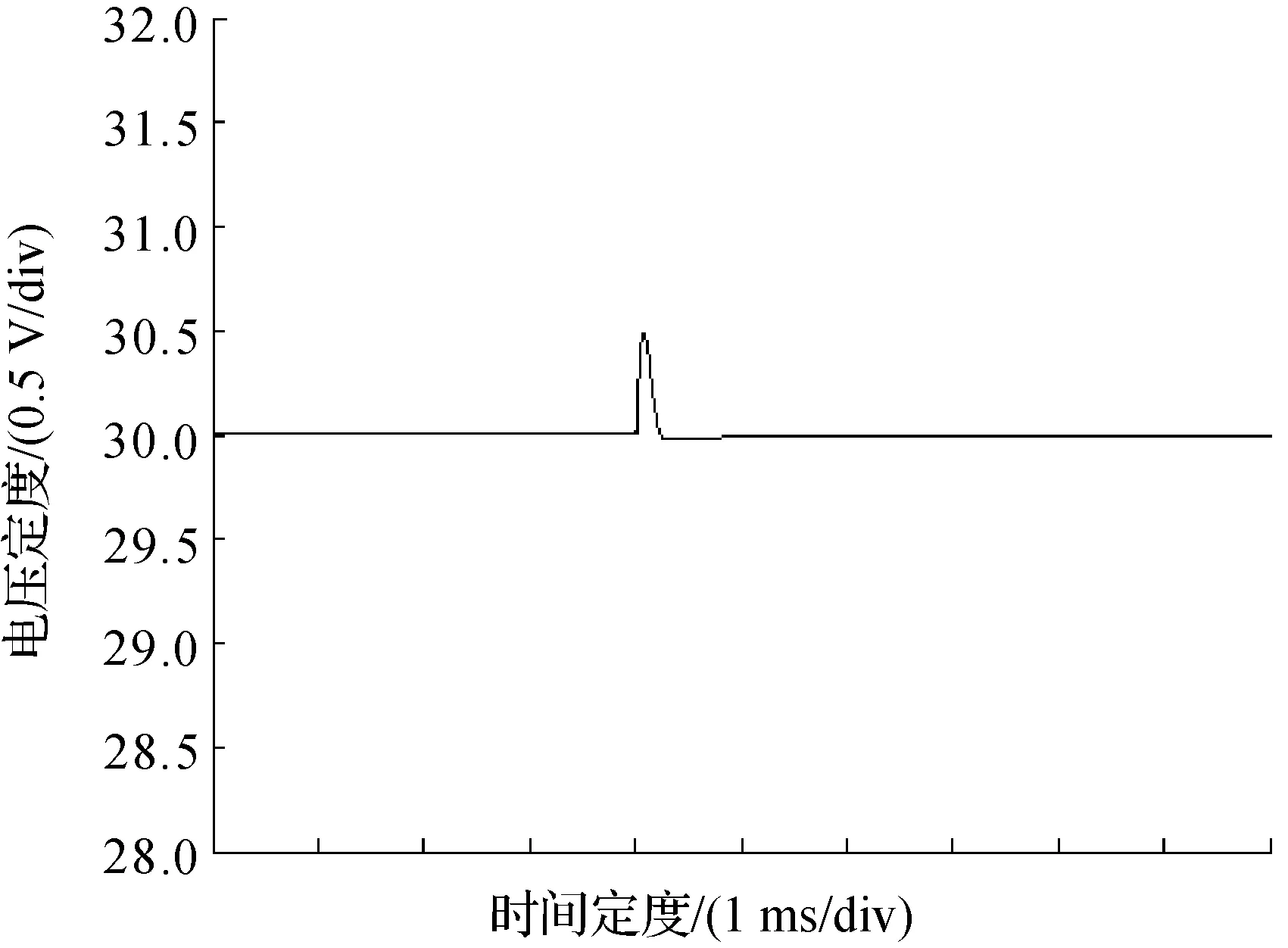
(b)电压控制模式

(a)传统控制模式
当负载电流从1 A到3 A变化时,由图7(a)可知,传统控制模式下,输出电压的超调量约为800 mV,恢复时间约为2.2 ms;由图7(b)可知,在电压控制模式下,输出电压的超调量降低到680 mV,恢复时间降低到1.2 ms,系统在负载扰动下的动态性能得到明显改善.
5 结 论
本文首先分析了Buck变换器的基本原理,利用状态空间平均法建立Buck变换器电感电流连续模式下的数学模型,设计了闭环控制系统小信号模型和补偿网络.仿真波形验证了所设计的Buck变换器数学模型及闭环控制策略的合理性.
[1] 王加典,黄振跃,赵德安.Buck变换器扰动补偿控制算法及实现[J].农业工程学报,2015,31(8):214-219.
[2] 孙 路,陆亭华,赵继敏.BUCK变换器状态空间平均法建模与闭环仿真[J].电气自动化,2014,36(4):1-4.
[3] 桑绘绘,杨 奕,沈彩琳.基于PID控制的Buck变换器仿真系统设计[J].南通大学学报,2011,10(1):24-28.
[4] 吴 超,陈 博,曾 程.基于双闭环控制的降压型DC/DC转换器仿真[J].武汉理工大学学报,2011,33(5):728-734.
[5] 杨 航,刘 凌,阎治安.双闭环Buck变换器系统模糊PID控制[J].西安交通大学学报,2016,50(4):35-40.
[6] 王靓华,岳继光,苏永清.平均值电流控制型Buck变换器控制系统的设计[J].电源技术,2013,137(12):2225-2228.
[7] 魏立明,吕雪莹.基于MATLAB软件的直流斩波电路的研究[J].浙江水利水电学院学报,2016,28(1):77-80.
[8] 夏兴国,陈乐柱,潘小波.基于小信号模型的新型Buck变换器补偿网络设计[J].重庆工商大学学报,2016,33(1):52-58.
Control and Compensation Network Design of Buck Converter
QIAN Ye-ce, XU Wei-bing, SHI Guo-ping, SUN Zuo
(Department of Physics and Electrical Engineering, Chizhou College, Chizhou 247000, China)
In order to ensure the stability of the output voltage of the Buck converter and the dynamic performance under the condition of voltage and load disturbance, it is the key to establish a reasonable mathematical model and compensation network. The mathematical model of Buck converter is established under the inductor current continuous mode by using state space average method, the expression of state space and transfer function of the system is determined, the small signal model of closed loop control system is designed, and the relationship between input voltage disturbance and load current disturbance on output voltage is also established. The designed compensation network adopts PID compensator. The mathematical model of the Buck converter and the rationality of the closed loop control are verified by simulation.
Buck converter; small signal model; compensation network
2017-01-03
安徽省教育厅重点科研项目(KJ2017A577);安徽省教育厅质量工程项目(2014ZY077)
钱叶册(1972-),男,安徽枞阳人,硕士,讲师,研究方向为电力电子技术.
TM33
A
1008-536X(2017)04-0079-04