直升机载空空导弹射后截获误差源研究
2017-06-23吕振瑞任宏光
吕振瑞,任宏光,王 涛
(中国空空导弹研究院,河南洛阳 471099)
直升机载空空导弹射后截获误差源研究
吕振瑞,任宏光,王 涛
(中国空空导弹研究院,河南洛阳 471099)
新一代直升机载空空导弹将采用复合制导体制,为提高导弹中末制导交接时刻的截获概率。文中对影响红外型直升机载空空导弹中末交接时刻截获概率的主要误差源进行了详细分析,在确定各个误差源范围的基础上,通过一种工程实际应用的数学模型对截获概率进行了仿真计算,进一步分析了误差源对截获概率的影响,为直升机载空空导弹武器系统的误差分配提供了重要理论依据。
射后截获;截获概率;误差源;数学模型;直升机载空空导弹
0 引言
射后截获技术应用于红外型直升机载空空导弹可以解决红外导引头对目标迎头探测能力的局限,增加红外导弹的有效攻击距离。与雷达型空空导弹相似,其对目标的有效截获仍是导弹首先要完成的任务,但由于制导方式、发射平台、导引头探测能力等的不同而带来的目标截获概率又有很大区别。红外型直升机载空空导弹要实现有效截获必须满足两个条件:a)距离截获,目标在导引头作用距离内;b)角度截获,目标在导引头作用视场内。在导引头视场角和作用距离一定的情况下,目标截获概率受制于导弹武器系统各种误差源所导致的目标指示误差[1-2]。
1 影响截获概率的主要误差源及其计算公式
对于发射后截获导弹,在发射前只需完成弹载惯导(子惯导)与机载惯导(主惯导)的对准和载机向导弹装订的目标位置、速度,导弹发射后继续由载机通过数据链向导弹定时传送载机雷达测量的目标位置和速度等信息,直至弹目距离达到导引头截获距离,控制系统给出目标指示和随动指令,导引头随动到目标指示方向,对目标进行探测、搜索,截获目标后导弹进入末制导段[3]。
1.1 主要误差源
从发射后截获导弹作战使用过程的描述可知,影响发射后截获的主要误差因素包括[4-8]:
1)主惯导与子惯导之间的对准误差;
2)载机测量误差(载机姿态角测量误差、载机雷达测角误差、载机雷达测距误差、载机雷达测速误差等);
3)导弹自身测量误差(导弹位置误差、导弹姿态误差);
4)目标机动引起的误差;
5)导引头的随动误差。
其中误差源1)~4)会造成目标指示误差,误差源5)会造成实际导引头指向与指令指向存在误差,这些都会影响导引头对目标的截获概率。
1.2 各误差源引起的误差计算公式
射后截获技术中导弹、载机和目标的几何关系可用图1简要描述,其中H为载机,T为目标,M为导弹,RHT为载机与目标距离,Δφ为载机雷达对目标的测角误差,Δd为载机雷达对目标的测距误差,ε为载机目标连线与导弹目标连线的夹角,ψ为导弹对目标的指示误差,DMT为导弹导引头截获距离,D为导弹与带有误差的目标测量值的距离。

图1 射后截获中导弹、载机和目标几何关系
1.2.1 雷达测量误差引起的目标指示误差
载机雷达在测距、测角、测速时均存在误差,会导致目标指示误差。对于红外型空空导弹可忽略测速误差对目标指示误差的影响,由图1可得测距和测角产生的目标指示偏差近似公式为:
(1)
式中:Δd为测距误差;Δφ为测角误差;RHT为机目距离;DMT为导引头截获距离。在截获距离一定,减小载机和目标之间的距离会使目标指示误差角减小,但并不明显,弹目距离较大时目标指示误差较小。
1.2.1 惯导对准误差引起的目标指示误差
假设载机主惯导精确,子惯导与主惯导对准误差包括姿态角误差、速度误差、位置误差。忽略位置误差和速度误差,只考虑姿态角误差,造成的目标指示角误差为[6]:
(2)
式中:Δφ为对准误差的标准差;RW为不考虑初始装订速度,纯粹由导弹加速度积分计算出的导弹飞行距离;DMT为导引头截获距离。在导弹探测距离一定的情况下,发射距离越远,对准误差造成的最大指示误差越大;而增加导引头探测距离可以减小目标指示角的误差;当弹目距离和载机发射距离相等时,目标的指示误差角等于惯导对准误差。
1.2.3 目标机动引起的目标指示误差
由于数据链修正指令一般不包含目标的机动信息,在数据链周期内,目标的机动将引起目标指示方向散布中心的偏移。
在数据链周期内,由于目标机动所产生的最大指示误差可近似为:

(3)
式中:aT为目标加速度;t为数据链信号得到更新前所持续时间。
1.2.4 目标数据传输延时误差引起的目标指示误差
由于载机雷达信号处理延迟,导弹接收到的目标信息是上一时刻目标的运动信息,实际目标的运动会造成目标指示方向的偏移。
由信息延时造成的目标指示误差角最大为:
(4)
式中:VT为目标速度矢量;Ty为信息滞后时间。
1.2.5 加速度计误差引起的目标指示误差
由于惯导系统是利用加速度计提供的比力数据计算导弹的位置。因此,加速度计的误差会造成导弹位置的测量误差。
在不考虑对准误差时,导弹飞行时间为T,直线飞行状态下,由加速度计误差引起的目标指示偏差最大值可近似为:
(5)
式中RMT为弹目距离。
1.2.6 陀螺误差引起的目标指示误差
陀螺是导弹角运动的测量器件,对惯导系统的姿态误差产生直接影响。由陀螺造成的姿态测量误差会导致导航系统计算出的导航坐标系与真实的导航坐标系不重合。导弹位置的计算是在导航坐标系下进行的,因此陀螺的误差也会造成导弹位置的测量误差。
在不考虑对准误差时,导弹飞行时间为T,直线飞行状态下,由陀螺误差δωp引起的目标指示偏差最大值可近似为:

(6)
式中:T为导弹飞行时间,从上式可以看出弹载陀螺引起的目标指示误差随飞行时间呈线性增加。
1.2.7 导引头随动误差引起的目标指示误差
当弹目距离达到导引头截获距离时,控制系统向导引头发出目标指示方向和随动指令,导引头伺服系统控制光轴向目标指示方向运动并不断跟踪目标指示方向,但光轴与目标指示方向之间会存在误差,即导引头随动误差。
由随动误差引起的目标指示误差与随动误差相等,该误差是一个随机值,实际仿真中用其平均值代替。
2 截获概率的数学模型
目标指示误差是指当导弹导引头的光轴指向目标时由于导弹受各种随机误差因素的影响使得光轴指向目标附近的一个区域而不能准确地指向目标。目标指示误差在一定条件下是一个服从正态分布的随机变量,假设其均值为m,均方差为σ。如图2所示,O为导引头视场中心,目标指示的散布中心为MT,O、MT之间的距离为目标指示误差的均值m。根据正态分布的特性,目标指示的绝大多数应该落在以MT为圆心、3σ为半径的圆内。由于导引头的视场角是一定的,假设视场范围是以O为圆心、d为半径的圆,当目标能量达到一定值且落入该圆内才有可能被截获,目标落入该圆内的概率称为落入概率[1]。
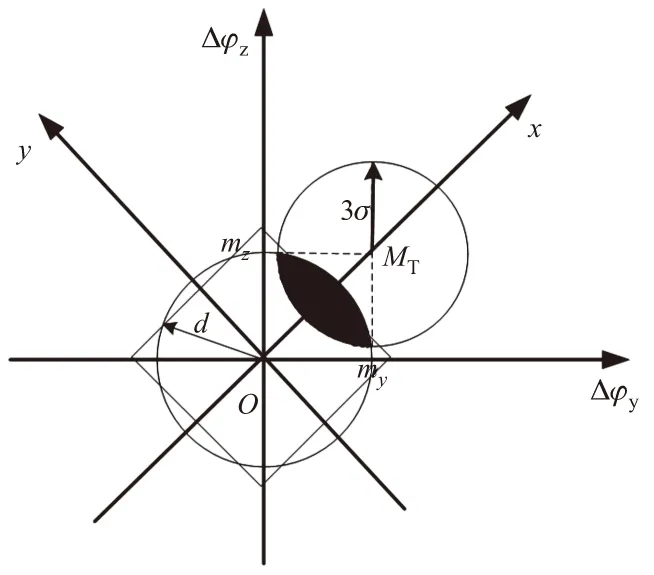
图2 落入概率示意图

P0=(2F(U1)-1)(F(U2)-F(U3))
(7)
当目标落入导引头视场且能量大于或等于阈值时,可以利用式(7)计算导引头一次截获目标的概率。有了导引头截获目标的概率和导弹成功接收数据链信息后,还必须防止虚警。当弹目距离达到导引头截获距离时,导引头就试图在噪声背景下识别目标。实际工程应用中为使导引头能成功截获目标并处理目标指示的积累误差,必须在截获时间内进行若干次成功探测的尝试,假设进行N次尝试,每次尝试导引头识别出目标概率如式(7)计算的目标落入概率P0。则导引头成功截获目标的概率为[9-10]:
(8)
式中:PK为各次尝试事件完全相关时,N次尝试中成功截获目标概率的最大值;ξ为介于0到1之间的相关系数;PH为当各次尝试不相关时,N次尝试中至少有一次成功截获目标的概率;N为在截获期间导引头探测目标的尝试次数;P1为防止虚警,在规定的N次连续有效探测的概率积。
3 截获概率仿真与分析
考虑到直升机载空空导弹发射后截获模式主要用于直升机远距离攻击或近距离大离轴作战,故在典型高度上选取了两个条件进行初步仿真分析,各误差源按表1设置,弹道条件如表2所示,设导引头截获距离为5 km,则发射距离10 km和12 km时各误差源产生的指示误差如图3、图4所示。
表1 仿真误差源取值
表2 弹道仿真条件
设导引头有效半视场为2.5°,连续5次截获目标为稳定截获,发射距离分别为12 km、10 km时不同截获距离下的截获概率如表3所示,当弹目距离为5 km时计算截获概率,其截获概率随目标指示误差变化曲线如图5所示。
图3 条件1各误差源产生的指示误差
图4 条件2各误差源产生的指示误差
发射距离/km1210截获距离/km456456截获概率/%91.094.698.293.496.299.2
图5 截获概率随目标指示误差变化曲线
4 结论
基于上述仿真,在载机雷达测距误差不大于50 m、测角精度不大于0.25°,取主子惯导对准为精对准(不大于0.3°),数据链周期为1 s时,导弹发射后截获目标概率可达到90%,能够实现对目标的有效攻击,同时可以得出:
1)载机测量误差、主子惯导对准误差和目标机动所带来的误差对指示误差影响较大,由于直升机载空空导弹飞行时间较短,陀螺和加速度计的测量误差对指示误差影响较小;
2)对比条件1和条件2,在导引头截获距离一定的情况下,发射距离较近时指示误差较小,截获概率较高;
3)增加导引头视场和探测距离,可以提高截获概率。
[1] 樊会涛. 复合制导空空导弹截获目标概率研究 [J]. 航空学报, 2010, 31(6): 1225-1229.
[2] 樊会涛. 空空导弹方案设计原理 [M]. 北京: 航空工业出版社, 2013: 23-67.
[3] 闵华侨, 金钊, 张伟. 发射后不管技术在防空导弹中的应用与发展 [J]. 飞航导弹, 2006(11): 38-40.
[4] 任宏光, 程海彬. 直升机载空空导弹复合制导系统的交接误差分析 [J]. 弹箭与制导学报, 2011, 31(4): 8-10.
[5] VATHSAL S, SARKAR A K. Current trends in tactical missile guidance [J]. Defence Science Journal, 2005, 55(2): 265-280.
[6] 李友年, 王霞, 李记新, 等. 无数据链情况下红外空空导弹射后截获概率研究 [J]. 四川兵工学报, 2013, 34(10): 4-7, 15.
[7] 薛晓东, 刘代军, 杨亚丽. 直升机载远程空地导弹发射后截获概率分析 [J]. 弹箭与制导学报, 2012, 32(3): 227-229.
[8] BROCH R, LESTAGE R. Three-degreeof-freedom (DOF) missile trajectory simulation model and comparative study with a high fidelity 6DOF model:DRDC Valcartier TM2003-056 [R]. [S.l.]:[s.n.], 2003.
[9] 宋强, 陈占海. 地空导弹目标截获概率分析 [J]. 四川兵工学报, 2013, 34(8): 30-32.
[10] 赵晓睿, 高晓光, 张建东. 主动雷达型空空导弹截获概率分析 [J]. 飞行力学, 2002, 20(3): 59-62.
Study on Error Source of Lock-on after Launch of Helicopter Borne AAM
LYU Zhenrui,REN Hongguang,WANG Tao
(China Airborne Missile Academy, Henan Luoyang 471099, China)
The new generation of helicopter borne air to air missile would adopt the composite guidance system, in order to improve the intercept probability at terminal guidance handover time. The main error sources of intercept probability befor the final handover time, which influenced infrared helicopter air to air missile were analyzed in detail. Based on determining the scope of the each error source, the intercept probability was analyzed through the mathematical model of practical engineering application, and the effect of error sources on intercept probability was further analyzed. It provided an important theoretical basis for the error distribution of helicopter borne air to air missile weapon system.
lock-on after launch; acquisition probability; error source; mathematical model; AAM for helicopter
2016-04-19
航空科学基金(20150112002)资助
吕振瑞(1987-),男,宁夏吴忠人,助理工程师,硕士研究生,研究方向:制导武器总体设计。
TJ013.2
A
