反潜巡逻机应召布放多基地声呐拦截阵搜潜效能研究*
2017-06-22鞠建波胡胜林
鞠建波,祝 超,胡胜林
(海军航空工程学院,山东 烟台 264001)
反潜巡逻机应召布放多基地声呐拦截阵搜潜效能研究*
鞠建波,祝 超,胡胜林
(海军航空工程学院,山东 烟台 264001)
为给反潜巡逻机应召搜潜提供决策支持,根据已知的潜艇概略航向和概略位置坐标,利用多基地声呐的优势,建立了三种反潜巡逻机应召布放多基地声呐浮标拦截阵搜潜模型,依据声波衰减原理,通过Matlab仿真了初始距离、潜艇初始概略分布、潜艇经济航速、潜艇初始概略航向、潜艇航向分布、布放距离和被动浮标布放个数对各方案搜潜效能的影响。结果表明,三种方案的搜潜效能都随着初始距离、潜艇初始概略分布、潜艇经济航速、潜艇初始概略航向的增大而减小,潜艇航向分布对搜潜效能影响不大。在相同条件下,弧线多基地阵的搜潜效能最佳,并能根据实际情况选择合适的布放半径和被动浮标布放个数。该方案适用于反潜巡逻机应召搜潜,对反潜作战具有一定的军事意义。
反潜巡逻机;多基地声纳;浮标阵型;搜潜效能
随着潜艇降噪、规避反潜机探潜等技术的发展,现代反潜作战更加困难。而反潜巡逻机的快速机动性,巡航时间长,不易被攻击的优点使其越来越被各国海军所重视。声呐浮标是反潜巡逻机的主要装备,具有携带、布放方便,能快速形成大面积搜索阵等优点。当获得潜艇的初始概略位置及航向信息,反潜巡逻机通常会布放拦截被动浮标阵进行搜潜,但由于机载浮标数目有限,环境复杂,故搜潜范围十分有限[1]。随着近几年多基地声呐的发展,其作用距离远,搜索范围大的优势,有效地解决了这个问题。因此本文利用应召布放拦截多基地声呐浮标阵的方法,结合多基地声呐的优势,考虑声波衰减和反潜巡逻机最小转弯半径等因素,建立不同阵型的多基地声呐浮标拦截阵模型,并分别对其搜潜概率进行仿真。
1 双基地声呐作用距离原理
双基地声呐系统工作原理如图1所示,噪声背景下的声呐方程为
TL1+TL2=SL-NL+DI-DT+TS
(1)
声传播损失按球面扩展加海水吸收考虑[2]:
TL=20lgr+αr+60
(2)

(3)

图1 双基地声呐工作原理
2 巡逻机布放多基地声呐浮标拦截阵模型
假设反潜巡逻机处于待飞状态,第一次获得潜艇信息直到其接到起飞命令时间为t发接,起飞所消耗时间为t起飞,飞至搜索区所需时间为t飞行,在搜索区布放完浮标所需时间为t布放[3]。反潜巡逻机的初始坐标为P1,坐标为(xpla0,ypla0),P2为潜艇目标S的初始概略位置,其坐标为(xsub0,ysub0),巡逻机的速度为vpla,最大转弯坡度角为ω,巡逻机的初始航向角为θ,所在海域重力加速度为g,Pi→Pi+1的时间为ti,对应飞行距离为Li,即∑ti=t飞行+t布放,则从获得潜艇信息至反潜巡逻机布放浮标结束总需时间为
t总=t发接+t起飞+∑ti
(4)
由已知条件计算反潜巡逻机最小转弯半径[4]:
(5)
2.1 布放弧线多基地阵
如图2所示,巡逻机接到命令之后,从P1出发沿直线飞抵P2布放声源浮标T,从P2沿直线飞抵P3,从P3沿以O为圆心,r1为半径的半圆弧飞抵P4,从P4沿以P3为圆心,r2为半径的四分之一圆弧飞抵P5,然后从P5沿以P2为圆心,r3为半径的圆弧依次飞抵P6,P7,P8,P9,P10均匀布放被动浮标Ri。

图2 巡逻机布放弧线多基地阵模型
当巡逻机由P1飞至P2时,由已知条件可求得
(6)
巡逻机由P2经P3,P4到P5时,可求得
(7)
巡逻机由P5经圆弧依次飞至P6,P7,P8,P9,P10均匀布放被动浮标Ri时,可求得
(8)
2.2 布放直线多基地阵
如图3所示,巡逻机接到命令之后,P1至P5的过程描述与弧线多基地阵一致,然后从P5沿以O2为圆心,r4为半径,弧度为β3的圆弧飞抵P6,由P6开始沿圆弧切线依次飞抵P7,P8,P9,P10均匀布放被动浮标Ri。
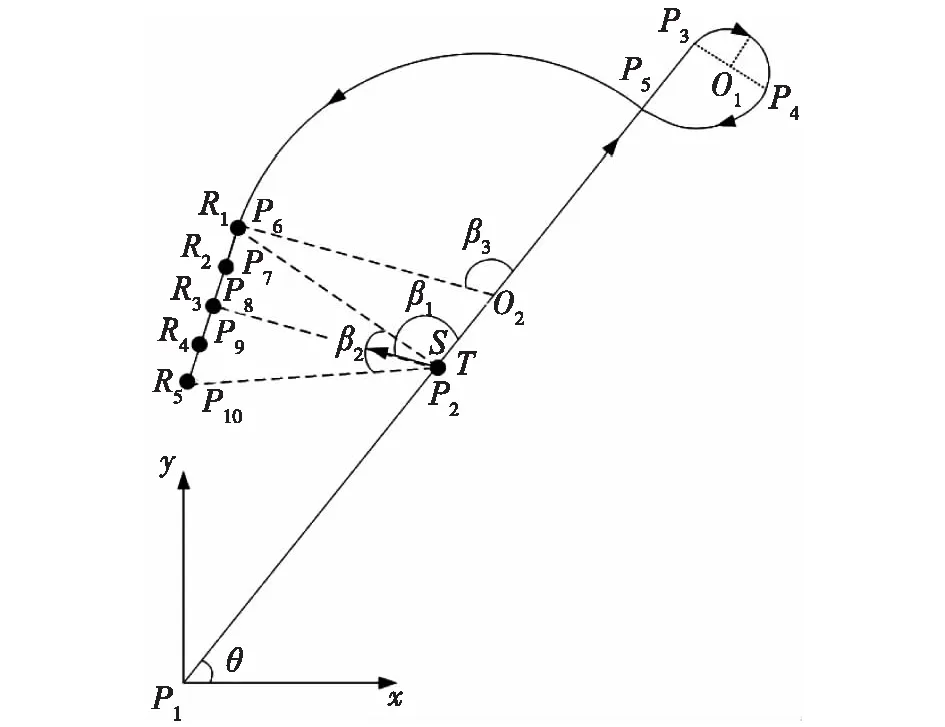
图3 巡逻机布放直线多基地阵模型
当巡逻机由P1飞至P2时,距离和飞行时间与弧线多基地声呐相同。
巡逻机由P2经P3,P4到P5时,可求得
(9)
(10)
巡逻机由P5经圆弧到P6布放被动浮标R1,并沿圆弧切线依次飞至P7、P8、P9、P10均匀布放被动浮标Ri时,可求得
(11)
其中,β3=β1。
(12)
2.3 布放折线多基地阵
如图4所示,巡逻机接到命令之后,P1至P5的过程描述与弧线多基地阵一致,从P5沿以O3为圆心,r5为半径,弧度为β4的圆弧飞抵P6布放被动浮标R1,沿圆弧切线飞至P7布放被动浮标R2,从P7沿直线和与直线相切的以O4为圆心,r6为半径,弧度为β5的圆弧飞至P8布放R3,飞机从P6飞至P8与飞机从P8飞至P10的飞行距离与飞行时间是一样的,故对P8至P10不再做说明,而被动浮标Ri是根据巡逻机飞行轨迹P6至P10的距离均匀布放的。

图4 巡逻机布放折线多基地阵模型
当巡逻机由P1飞至P2时,距离和飞行时间与弧线多基地声呐相同。
巡逻机由P2经P3,P4到P5时,可求得
(13)
(14)
(15)
β4=β1-β5
(16)
巡逻机由P5经圆弧到P6,再由P6飞至P10之间均匀布放被动浮标Ri时,可求得
(17)
(18)
(19)
(20)
3 搜潜效能仿真分析
3.1 多基地声呐阵搜潜概率模型
假设反潜巡逻机接到命令之后前往潜艇目标所在海域应召布放多基地声呐浮标拦截阵进行搜潜,以巡逻机出发时间作为时间起点,巡逻机和潜艇各自独立行动,潜艇所处深度与多基地声呐浮标阵的工作深度一致,潜艇初始位置分布和潜艇航向分布满足正态分布,航速满足以经济航速为均值的瑞利分布[5]。
反潜巡逻机布放完多基地声呐浮标阵后,在声呐阵的有效工作时间内连续采集K次潜艇位置坐标为(xsubk,ysubk),每次对应的目标强度为TSk,且满足式(3),k∈[1,K],布放的被动浮标坐标为 (xbuon,ybuon),n∈[1,N],声源浮标T的坐标与潜艇初始概略位置坐标(xsub0,ysub0)一致,若满足下式:
(21)
则认为多基地声呐浮标拦截阵搜索到潜艇,利用Monte Carlo方法仿真K次搜索,如果其中潜艇被搜索到M次,那么该多基地声呐浮标阵的搜潜概率P为[6]
(22)
3.2 搜潜仿真分析
为直观准确体现方案差距,使三种方案的声源浮标T至被动浮标R3的距离,即|P2P8|距离保持一致。其中取t发接+t起飞=0.25h,反潜巡逻机出发位置为(0,0)km,巡航速度为600km/h,布放浮标及监听搜索航速为350km/h,初始航向角为45°,最大转弯坡度角为30°,所在海域重力加速度为9.8m/s2,海水吸收系数α=0.0946,声源浮标为主动全向的,工作频率为1.5kHz,声源级为SL=230dB,被动浮标为被动全向的,有效作用距离取2km,检测阈为DT=14dB,噪声NL=70dB。下面将在同等条件下,分别对三种方案进行搜潜概率仿真。
仿真1:初始距离对搜潜效能的影响
仿真参数:潜艇初始概略位置为(m,m)km,初始位置分布为2km,经济航速为10kn,取|P2P8|的距离为12km,r1=2km,r2=4km,r6=2km潜艇初始概略航向β1=1/2 π,β2=2/9 π,β5=1/3 π,潜艇的航向分布为8°。当m为100km-800km时,仿真次数20000次,结果如图5所示。
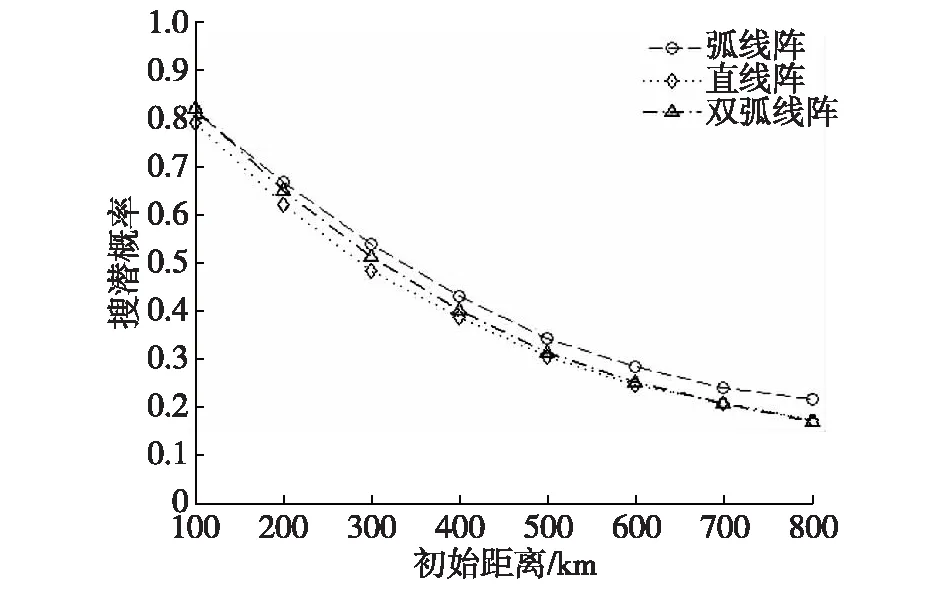
图5 初始距离对多基地阵搜潜概率的影响
由图5可知,三种多基地声呐浮标拦截阵的搜潜效率随着初始距离的增大而降低,在相同初始距离条件下,弧线多基地阵的搜潜效能优于直线多基地阵和折线多基地阵。
仿真2:潜艇初始位置分布对搜潜效能的影响
仿真参数:潜艇初始概略位置为(100,100)km,其余仿真参数与仿真1相同。潜艇初始位置分布为0.5km-7km时,仿真次数20000次,结果如图6所示。

图6 初始位置分布对多基地阵搜潜概率的影响
由图6可知,三种多基地声呐浮标拦截阵的搜潜效能随着潜艇初始位置分布的增大而降低,在相同潜艇初始位置分布条件下,弧线多基地阵的搜潜效能优于直线多基地阵和折线多基地阵。
仿真3:潜艇经济航速对搜潜效能的影响
仿真参数:潜艇初始概略位置为(300,300)km,其他仿真参数与仿真1相同,潜艇经济航速为4kn-16kn,仿真次数20000次,结果如图7所示。

图7 潜艇航速对多基地阵搜潜概率的影响
由图7可知,三种多基地声呐浮标拦截阵的搜潜效能随着潜艇经济航速的增大而降低,在相同潜艇经济航速条件下,弧线多基地阵的搜潜效能优于直线多基地阵和折线多基地阵。
仿真4:潜艇初始概略航向对搜潜效能的影响
仿真参数:潜艇初始概略位置为(300,300)km,其余仿真参数与仿真1相同。由于初始航向角θ为45°,故当潜艇初始概略航向β1大于180°时,布放方案可关于线P1P2对称布放,因此取β1为0°-150°,仿真次数20000次,结果如图8所示。

图8 潜艇初始概略航向对多基地阵搜潜概率的影响
由图8可知,三种多基地声呐浮标拦截阵的搜潜效能随着潜艇初始概略航向角的增大而降低,在相同潜艇初始概略航向角条件下,弧线多基地阵的搜潜效能优于直线多基地阵和折线多基地阵。
仿真5:潜艇航向分布对搜潜效能的影响
仿真参数:潜艇初始概略位置为(300,300)km,其他仿真参数与仿真1相同。潜艇航向分布为1°-15°,仿真次数20000次,结果如图9所示。

图9 潜艇航向分布对多基地阵搜潜概率的影响
由图9可知,潜艇航向分布对三种多基地声呐浮标拦截阵的搜潜效能影响很小,在相同潜艇航向分布条件下,弧线多基地阵的搜潜效能优于直线多基地阵和折线多基地阵。
仿真6:多基地阵布放距离以及布放个数对搜潜效能的影响
仿真参数:潜艇初始概略位置为(300,300)km,其他仿真参数与仿真1相同。被动浮标布放5个,|P2P8|的布放距离为6km-20km;|P2P8|的距离为12km,被动浮标布放个数为3-6个,分别进行仿真20000次,结果如图10、图11所示。

图10 布放距离对多基地阵搜潜概率的影响

图11 布放个数对多基地阵搜潜概率的影响
由图10可知,在一定的被动浮标布放个数条件下,其搜潜概率随着布放距离的增大先增大再减小,且在相同的布放距离条件下,弧线多基地阵的搜潜效能优于直线多基地阵和折线多基地阵;图11可知,在一定的布放距离条件下,其搜潜概率先随着布放个数的增多而增大,并渐渐趋于平缓,且在相同的布放个数条件下,弧线多基地阵的搜潜效能优于直线多基地阵和折线多基地阵。
4 结束语
本文根据已知的潜艇信息,利用多基地声呐优势,并结合反潜巡逻机最小转弯半径等约束,构设了三种反潜巡逻机应召布放多基地声呐浮标拦截阵搜潜模型,仿真了初始距离、潜艇初始概略分布、潜艇经济航速、潜艇初始概略航向、潜艇航向分布、布放距离和被动浮标布放个数对各方案搜潜效能的影响。结果表明:同等条件下,反潜巡逻机应召布放弧线多基地阵的搜潜效能最好,其在实际应用中,能根据实际情况选择合适的布放距离和被动浮标的布放个数。这对提高反潜巡逻机反潜作战能力具有一定的意义。
[1] 杨兵兵, 鞠建波, 张鑫磊. 反潜巡逻机浮标布阵应召搜潜效能研究[J]. 系统仿真技术, 2015, 11(3): 202-206.
[2] 阎宜生, 丁玮, 徐贵英,等. 双基地声呐作用距离估计[J]. 西北工业大学学报, 1996, 14(4): 545-548.
[3] 杨根源,吴福初,周国庆,等. 反潜直升机应召搜索使用声呐浮标的作战运用[J]. 海军航空工程学院学报, 2004,19(3):370-372.
[4] 方振平. 飞机飞行动力学[M]. 北京: 北京航天大学出版社,2005: 122-123.
[5] 屈也频, 廖瑛. 潜艇位置散布规律与搜潜效能评估模型研究[J]. 系统仿真学报, 2008, 20(12): 3280-3283,3289.
[6] 杨日杰,王正红,周旭,等. 浮标阵形对搜潜效能影响的研究[J]. 计算机仿真, 2009, 26(12): 16-19.
Efficiency Research for On-call Anti-submarine by Anti-submarine PatrolAircraft Dropping Interception of Multistatic Sonar Array
JU Jian-bo, ZHU Chao, HU Sheng-lin
(Navy Aeronautics and Astronautics University, Yantai 264001, China)
In order to provide decision support for on-call submarine by anti-submarine patrol aircraft, in this paper, based on the known submarine general course and general position coordinates, taking advantage of the multistatic sonar, kind of anti-submarine patrol aircraft on-call searching model is set up, using acoustic attention principle, through Matlab, the influence of the initial distance, initial position of the submarine, submarine speed, submarine general course, submarine course distribution, dropping distance and dropping number on searching submarine efficiency is analyzed. The results shows that, searching submarine efficiency of three methods decreasing with the increase of the initial distance, initial position of the submarine, submarine speed, submarine general course. Under the same condition, searching submarine efficiency of arc multistatic sonar array is the best, and it can choose the appropriate dropping distance and dropping number according to the actual situation. This method is suitable for anti-submarine patrol aircraft on-call anti-submarine and has some significance on anti-submarine warfare.
anti-submarine patrol aircraft; multistatic sonar; sonobuoy array; searching submarine efficiency
2017-03-13
国家自然科学基金资助项目(60874112);军队科研专项资助项目(41512322)
鞠建波(1961-),男,山东烟台人,教授,研究方向为水下目标与识别。 祝 超(1993-),男,硕士研究生。 胡胜林(1993-),男,硕士研究生。
1673-3819(2017)03-0055-05
TJ67;E925.4
A
10.3969/j.issn.1673-3819.2017.03.012
修回日期: 2017-04-07
