基于漏磁原理的非接触式电磁阀检测技术应用研究
2017-06-22张子剑杨秀山
张子剑,王 頔,龚 博,贾 睿,杨秀山
(1. 北京宇航系统工程研究所,北京,100076;2. 中国运载火箭技术研究院物流中心,北京,100076)
基于漏磁原理的非接触式电磁阀检测技术应用研究
张子剑1,王 頔2,龚 博1,贾 睿1,杨秀山1
(1. 北京宇航系统工程研究所,北京,100076;2. 中国运载火箭技术研究院物流中心,北京,100076)
电磁阀是重要的控制部件,应用于各类航天飞行器。根据电磁阀阀芯动作特性,结合目前漏磁检测的一些研究,提出了一种基于漏磁原理的非接触式电磁阀检测方法,对飞行器的电磁阀极性进行测试,并设计了电磁阀极性检测系统.在此基础上对检测系统应用进行研究,验证漏磁检测技术应用到航天器极性测试中的可行性和准确性。结果表明:基于漏磁原理的非接触式检测技术应用于电磁阀动作检测,与控制指令相比,检测结果准确可靠。
电磁阀;航天飞行器;漏磁;极性检测
0 引 言
随着集成化控制系统的不断发展,电磁阀在工业中的运用也越来越广泛和灵活,它既可以用于水、空气和中性气体及其它与电磁阀材质相适应的气体、液体的开关控制,又可用作安全和保护连锁系统控制[1]。各类航天飞行器中常常用其对多路小型喷管进行通断控制,因此,对电磁阀动作结果的检测一直是各项目面临的重要问题。目前在航天系统对电磁阀动作检测的办法通常有人工触摸检测、振动式检测、电流检测等,但可能存在误判率较高、控制回路中需额外串入设备等不足,如振动式检测,当两电磁阀相距较近时,其形成的振动易被相临的振动传感器捕获,难以分辨。
漏磁检测以其无损、非接触、自检过程简单以及准确性高等优点,在无损检测领域得到了迅猛的发展。国外对漏磁检测技术的研究较早,Zuschlug[2]于1933年首先提出应用磁敏传感器测量漏磁场的思想,但直至1947年Hastings设计了第1套漏磁检测系统,漏磁检测才开始受到普遍的承认[3]。中国在漏磁检测技术的理论研究和工业应用方面都落后于欧美等工业发达国家,但近年来,随着中国科技水平的提高和应用的需求,漏磁检测技术也越来越多的投入到实际应用[4]。在航天领域,使用较多的仍是电流和振动式检测办法,但基于漏磁原理的电磁阀检测技术以其无损、非接触等优点得到了关注,并逐渐开展转入了工程应用。
根据国内外现有漏磁检测的研究进展,结合航天飞行器的实际使用需求,提出一种基于漏磁原理的非接触式电磁阀极性检测方法,设计了电磁阀极性检测系统,并验证了此方法实际应用到航天飞行器地面极性检测中的效果。
1 漏磁检测方法的基本原理及影响因素
漏磁场测量方法捕获的是电磁阀通/断电时刻的磁场变化过程,通过磁场反映电流变化过程,进而确定阀芯运动状态。由于阀芯完全吸合后,阀壁磁场饱和,磁力线大量泻出,因此可以测试到阀芯吸合后和断开瞬间的磁场状态变化,2种状态下磁力线磁场极性相反,即可以反映阀门的通电和断电过程。磁敏传感器可以捕获该信号,并按一定规律转换成可用输出信号的器件或装置。磁敏传感器是伴随测磁仪器的进步而逐渐发展起来的,在众多的测磁方法中,大都是将磁场信息变成电信号进行测量的。根据法拉第电磁感应定律,当N匝线圈在恒定磁场内运动时,设穿过线圈的磁通为Φ,则线圈内的感应电势E与磁通变化率dΦ/dt有如下关系:
然而,工业现场的电磁环境往往较为恶劣,存在较多的周期性电磁波干扰,而使得磁路信号的信噪降低,这种周期性电磁波干扰噪声,由于占用的频率范围宽、功率谱不确定,采用经典的低通滤波器、高通滤波器和带通滤波器都无法有效实现对它的抑制,甚至会造成后续特征抽取时无法实现对有效磁路信号(电磁阀打开和关闭过程)特征分离,从而影响检测的准确性。
2 电磁阀极性检测系统组成及设计
通过上述可知,须完成对电磁阀漏磁的准确检测,方能判断阀芯的动作情况。电磁阀极性检测系统主要由数据采集计算机,含电源、总线板(含交流/直流总线板和CPCI总线板)、处理机板、A/D板、控制IO板(简称KIO板)、显示屏以及数字IO板(简称DIO板)、磁性传感器等组成,如图1所示。其中,数据采集计算机主要完成人机界面交汇、I/O控制、A/D采样、测试数据记录、数据处理及判读和测试结果显示、打印控制等各项工作;液晶显示屏安装于仪器后面板上,形成一体化形式。
电源部分采用二次电源形式,AC/DC电源由数据采集计算机以12 V形式提供,DIO板所用电源为+12 V经DC/DC变换后的二次电源,各DC-DC模块构成相互独立的电源体系,提高了仪器抗干扰能力;测量系统则采用隔离技术,实现电气隔离,提高仪器的抗干扰性能。
主要工作过程如下:电磁阀通电工作后,线圈产生磁场,漏磁通在磁路传感器感应的电压信号通过滤波放大后送入计算机A/D板,A/D板完成模数转换后将信号送入计算机进行处理。同时,KIO提供数字量输入和数字量输出接口。通过KIO板提供的指令输出信号,可使DIO板处于磁路自检激励状态,在无外界信号时可完成检测仪功能自检。
2.1 非接触式漏磁场定向检测
磁传感器在生物医学、资源探测、地震灾害预警等领域有着广泛的应用。随着对磁场探测精度越来越高的要求,磁传感器的性能也不断的提高。从最常用的霍尔效应磁传感器、磁阻传感器、磁通门磁传感器到超导量子干涉器件(Superconducting Quantum Interference Device,SQUID)和基于巨磁阻效应的磁传感器,磁传感器技术不断的向前发展[5]。
考虑到实际需求、现场恶劣的使用环境及成本造价等因素,本项目选择磁通门磁传感器作为探测装置。采集电磁阀动作产生漏磁场变化信号,较大的技术难点在于:电磁阀动作产生的磁场信号为不大于10 mV的弱信号,且周围存在其他电磁阀动作产生的磁场信号及其它设备产生的磁场信号,在此环境中,对信号处理及判读带来较大的难度。
针对此问题,磁性传感器结构采取选择性采集磁场信号,并对有效信号进行集中的结构,即高效采集电磁阀动作信号,同时具有屏蔽周围干扰信号的结构特点。
针对电磁阀动作漏磁信号微弱且环境干扰源复杂的特点,设计传感器由线圈骨架、隔磁环、壳体、放大电路板及电缆组成。高匝数线圈实现对微弱磁场信号的采集,骨架能够有效收集正向磁场信号并与壳体内壁构成完整闭合磁路,合理控制长径比降低电荷趋肤效应,通过隔磁环隔离外部磁场与采集到的内部磁场,提高抗干扰能力,放大电路实现对采集到的磁场信号进行滤波和放大的功能。磁性传感器结构见图2。
线圈骨架由高导磁材料1J80制成,此高导磁材料对磁场信号有较强的敏感性,对于电磁阀动作产生弱信号能够实现灵敏感知,达到提高磁力线密集程度,提高磁性探头灵敏度的目的。根据法拉第电磁感应定理,可实现将磁场信号通过骨架及线圈转换为电信号的目的。绕线方式采用双线并绕技术,有效保证放大器输入端输入电压正负端一致性较好,并将串联绕线的中间抽头端接地,有效避免放大器在高放大增益的状态下输出不稳定的情况。通过严格控制线圈骨架结构的长径比降低电荷趋肤效应的影响,提高线圈输出信号激励,同时满足小巧、轻便的总装要求。隔磁环采用不导磁材料1Cr18Ni9Ti制成,作用在于隔断线圈骨架与壳体之间的磁路,使骨架感应吸收的磁场信号延线圈骨架轴向传输,并构成良好的磁场闭合回路,实现磁场信号有效集中的目的。
壳体将感应吸收的磁场信号屏蔽于壳体内,使其在壳体内构成完整闭合磁路。在材料上,以铝材料作为基材,外表面电镀导磁材料镍,实现屏蔽周围干扰信号(包括其他电磁阀动作产生的磁场信号及其它设备产生的磁场信号)。
2.2 全频率域范围磁场信号自适应滤波
为避免磁路信号滤波后,波形发生变化,首先将微弱磁路信号进行放大,保证与采集系统的适配性,然后针对信号中的干扰部分进行滤除。考虑到检测目的只是要求准确辩识出电磁阀的开与关,没有提出对其频谱进行准确分析的要求,而且进行频谱分析需将信号作离散傅里叶变换,在频域通过算法进行处理,需要额外的CPU资源开销。而且通过现场测试,发现存在的干扰源主要为异常尖峰和周期性干扰,因此本文只对时域内的信号进行处理,确保快速、准确及实用性。
图3为放大电路原理。图3中C1,C2,C3构成“π”型滤波器,用于滤除信号间和信号与地间干扰。电路的截止频率由R1,R2,C1,C2,C3的取值进行调整。
2.2.1 截止频率
在频域内满足3 dB插入损耗所对应的频点,保证工作频率小于截止频率,由电路中R1,R2,C1,C2,C3的取值决定。
式中 R1=R2;C1=C2;C3≈10C1。
2.2.2 放大器增益
放大器增益G为
式中 RG为放大器A1增益调节电阻。
将在时域中将过零点脉冲符合脉宽小于6 ms、幅度超过0.05的窄脉冲信号进行限幅消峰处理,固定其脉冲幅度为0.05,从而将各种多路径复杂条件下的强电磁干扰信号与电磁阀动作时的漏磁场特征信号分离,实现对飞行器其他系统加电和断电电磁噪声的抑制。经尖脉冲滤波控制算法前、后的图像如图4所示,对照最后一个负向脉冲,异常负向尖脉冲被有效削平。
针对磁路信号中混入的周期性干扰信号,数字滤波是一个不错的选择,所谓数字滤波,就是通过一定的计算程序减少干扰在有用信号中的比重,故实质上是一种程序滤波[6]。文献[7]提出滑动平均滤波办法,滑动平均滤波实际上它是通过一个长度为N的滑动窗,沿离散时间不断向前滑动,对这N个数据做算术平均便得到一次滑动平均滤波的结果。这样做使得数据采集系统不必一次采集大量数据来做平均值滤波,节约了采集时间,让平均值滤波有了实践的意义。
本文选取一固定长度(22个数据点)的滑动数据块作均值滤波,即首个经滤波处理的数据实际为原始位置数据点1~22的所有值的加权值的均值,滑动块长度为22×0.2=4.4 ms(实际周期性干扰最大脉宽约为14.4×0.2=2.88 ms),因此滑动数据块长度覆盖了干扰信号周期,可以有效实现自适应对消过程。其滤波器对比特性结果如图5所示。
2.3 电磁阀漏磁信号特征识别
在采用“新型非接触式磁性传感器”获取到电磁阀动作的磁场信号情况下,由软件实现对阀门打开和关闭过程机器判读(关键算法),其难点在于电磁阀线圈绕制和装配方向的不确定性,导致电磁阀开启时各阀门磁场的S极和N极并不一致,从而造成不同阀门在执行相同的动作时,磁传感器敏感输出的电信号有正有负,如图6所示。
因此,算法需要综合信号幅度、曲线形状等多种因素实现对电磁阀打开和关闭过程的自动判读,需要在软件上以曲线开启过程的爬升变化率进行界定。电磁阀磁路特征识别算法如下:
a)通过对数据序列点的归一化处理,规范不同电磁阀动作时的磁路曲线;
b)通过数据序列的自动分割算法,完成对离散信号数据序列的窗选;
c)通过冒泡排序,据“轻气泡”不能在“重气泡”下的原则,从下到上扫描数组[8],完成对窗选数据序列的极大值和极小值的寻找;
d)通过阈值的过零点检测,寻找窗选数据序列中符合阈值条件的首个过零数据点;
e)窗选数据序列的相邻2次过零动作曲线,以曲线过零点至其后面临近出现的极值点的时间差为大者定义为电磁阀开启过程,较小者定义为关闭过程。
算法约束条件:过零曲线段一侧应为正值,另一侧应为负值,正负值出现先后顺序不作要求(即允许电磁阀线圈装配关系不作约束),但应成对出现。
特征抽取的最主要特征是:
a)设置软件阈值,以区分有效信号和干扰信号;
b)根据阀芯动作信号的宽度及上升沿斜率,确定电磁阀属于开启或关闭动作过程。
算法实现流程如图7所示。
2.4 试验数据及测试结果
以某飞行器项目地面测试结果为例,该项目需同时完成16路的电磁阀的动作情况,地面测试时周围同时存在无线微波、交流电机等周期性干扰,也有大功率伺服模拟能源动作的尖峰干扰,同时还存在2路电磁阀同时开启,或是开启时间有重合。
检测仪进行极性测试前,首先安装16路磁路传感器(根据飞行器的实际特点,可配备不同的安装支架,将磁路传感器安装于距离电磁阀尽可能近的地方),要求磁性传感器编号与检测仪侧面板安装插座、喷管编号一一对应,然后进行自检测试。自检测试过程中,根据相应的指令磁路传感器自施加激励,自检测试完毕,检测仪根据施加的激励指令和测试结果,自动对测试结果进行判别;系统测试时,指令由控制系统发出,检测仪根据控制系统指令自动启动记录,随后实时完成信号采集,信号采集结束后自动进行信号处理、打印,并与控制系统的指令发出结果进行比对。表1为电磁阀实际检测结果。
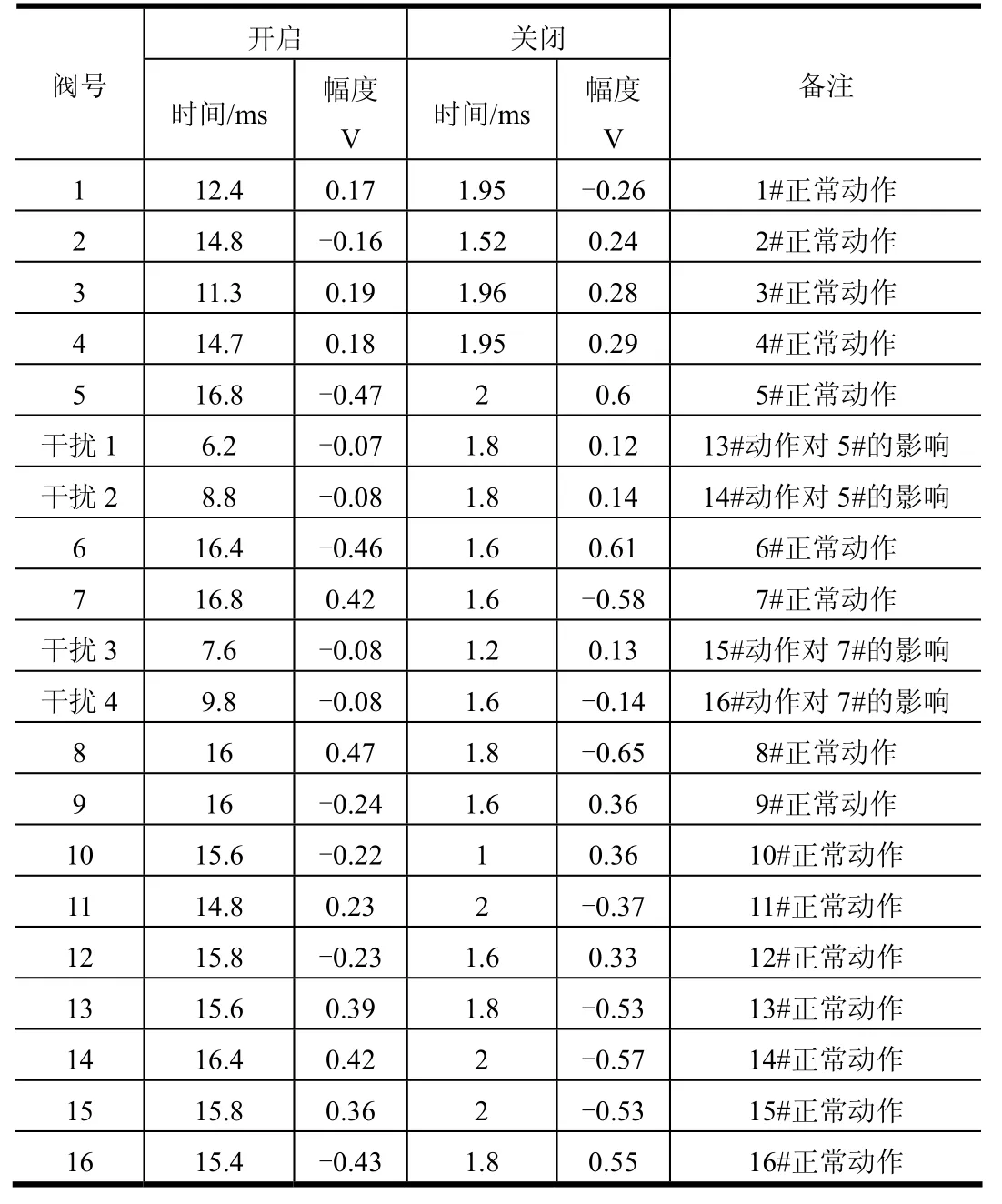
表1 电磁阀实际检测结果
从表1可知,该检测仪检测结果精准,与控制系统的激励一致,有效地避免了周边的各类干扰,测试真实可信。
3 结束语
本文所述磁性传感器与工业应用中的霍尔磁场传感器相比较,具有只敏感阀门打开和关闭过程的特点,且能够以差分形式输出信号,同时还具有采集距离更长,采集精度高等方面的优势。提出的软件算法有将地解决了多种电磁干扰下对电磁阀漏磁检测的影响难题,设计的极性检测系统在各种工况下均进行了实地测试,均能准确无误地完成功能,具有较好的稳定性和检测精度。
[1] 谢东, 居法立. 电磁阀在三门一号机组旁排阀上的应用[J]. 中国高新技术企业, 2014, 8(287): 44-45.
[2] 郑世才. 射线检测(Ⅱ级培训教材)[M]. 北京: 机械工业出版社, 1998.
[3] 李光海, 刘时风, 沈功田. 压力容器无损检测-漏磁检测技术[J]. NDT无损探伤, 2004, 26(12): 640-641.
[4] 马佼佼, 王作碧, 谢庆利, 石涛. 储罐罐底漏磁检测技术研究[J]. 辽宁化工, 2012, 41(9): 903-904.
[5] 曾宪金, 李庆萌, 赵文辉, 张军海, 孙伟民. 高灵敏度弱磁传感器研究[J]. 传感器与微系统, 2014, 33(1): 49-50.
[6] 高玉凯, 郑双雁. 非均匀采样信号的滑动滤波方法[J]. 测控技术与仪器仪表, 2010, 36(12): 75-81.
[7] 吴忻生, 唐萍, 秦瀚. 数字滤波技术在称重系统信号采集中的应用[J].传感器与微系统, 2010, 29(9): 131-134.
[8] 李强, 李会容, 张雪峰. 关于冒泡排序的改进算法的分析与比较[J]. 攀枝花学院学报, 2005, 22(4): 74, 92-95.
Application Research of Contactless Solenoid Valve Detection Technology Based on Magnetic Flux Leakage Theory
Zhang Zi-jian1, Wang Di2, Gong Bo1, Jia Rui1, Yang Xiu-shan1
(1. Beijing Institute of Astronautical Systems Engineering, Beijing, 100076; 2. China Academy of Launch Vehicle Technology Logistics Center, Beijing, 100076)
Solenoid valve is an important controller unit and it is used widely in serious of aerospace crafts. According to the characters of valve element and the present research results of solenoid valve detection technology, this paper proposes a method of contactless solenoid valve detection based on the theory of magnetic flux leakage. The purpose of the method is to test the polarity of solenoid valve and a polarity detector system is designed. It analyzes the application of the detection system and verifies the feasibility and accuracy of magnetic flux leakage detection technology applied on the polarity testing on aerospace craft. The result indicate: Contactless detection technology based on magnetic flux leakage theory apply on solenoid valve working test, compared with control command, the test result is accurate and credible.
Solenoid valve; Aerospace craft; Magnetic flux leakage; Polarity detection
V448.25+1
A
1004-7182(2017)03-0101-06
10.7654/j.issn.1004-7182.20170322
2016-11-22;
2017-02-03
张子剑(1987-),男,工程师,主要研究方向为飞行器电气系统总体研究与设计
