架空输电线巡检机器人的跨障运动轨迹控制
2017-06-19刘国平俞振东孙茂文秦科技
刘国平,缪 航,俞振东,孙茂文,秦科技
(南昌大学 机电工程学院 机器人控制实验室,南昌 330031)

架空输电线巡检机器人的跨障运动轨迹控制
刘国平,缪 航,俞振东,孙茂文,秦科技
(南昌大学 机电工程学院 机器人控制实验室,南昌 330031)
针对高压输电线检修维护问题,自主研发了新型三臂式架空输电线巡检机器人,并提出跨障的识别方案和动作方案。简化了此巡检机器人的跨障运动过程,采用D-H(Danevit-Hartenberg)建模方法建立了机器人跨障过程的运动学模型。在此基础上,应用拉格朗日力学方法完成了动力学建模。针对跨障运动轨迹跟踪问题,将外界干扰、误差等不确定因素考虑进去,采用鲁棒自适应PD(proportional-derivative)控制方法进行控制。为了验证此方法,加入传统PD控制方法进行对比。以理想的运动轨迹为目标轨迹,通过Simulink分别仿真得到2种算法的跟踪轨迹,将搭载2种算法的巡检机器人先后放在实际线路上运行,通过多传感器采集得到运动轨迹。实验结果显示它们的控制轨迹都非常接近目标值。从跟踪轨迹上对比2种算法,证明了所采用方法的有效性、稳定性和优越性。
巡检机器人;动力学模型;运动轨迹控制;鲁棒自适应PD控制
0 引 言
高压输电线路是电力系统的重要设施,担负着输送电力的重任,是国家基础设施建设和社会发展的“动脉”。然而,由于长期裸露在外,受自然灾害、鸟害、持续张力、磨损等影响,输电线路的巡检工作变得极其重要。常规的巡检方法包括人工巡检、航测法和刚起步的巡检机器人。巡检机器人以其检测精度高、效率高、运行稳定、维护成本低等优点,引致大批国内外组织机构竞先研发。其研究的重难点在于跨越防震锤、垂悬线夹、杆塔甚至耐张线夹等线上障碍[1]。
当前,日本、美国和加拿大都相继研发了高压输电线巡检机器人[2-3]。国内方面,在“863”计划的支持下,武汉大学、中国科学院沈阳自动化研究所、中国科学院自动化所与山东大学也都开展了对架空输电线巡检机器人的研制工作[4-7]。但多数处于两杆塔之间巡检,在许多方面存在问题,并不能实现推广。本文自主研发的巡检机器人采用三臂式机构,由前臂、中臂、后臂、伸缩机构、配重块以及机架构成,可以过防震锤、悬垂线夹、杆塔以及直线式的耐张线夹。
巡检机器人跨障运动轨迹的稳定控制是保证机器人成功跨障的要素。清华大学电力系统发电设备控制和仿真研究院对双臂巡检机器人的运动过程简化并建立动力学模型,分别利用PD(proportional-derivative)控制和鲁棒控制进行对比,得出鲁棒控制器的稳定性和收敛速度均优于PD控制[8]。在考虑外界扰动的情况下,本文采用一套结合鲁棒模型、自适应控制的PD控制方法,此方法由非线性PD控制和自适应补偿控制两大块组成,机器人模型的不确定部分由自适应控制器进行补偿,机器人的有界扰动通过鲁棒控制律进行调节。
1 机器人跨障动作简化
高压输电线路上主要的障碍物有防震锤、悬垂线夹、耐张线夹等,所测试的九江线路主要障碍物尺寸如表1(仅显示跨障需要考虑的尺寸)。根据机身尺寸及跨障原理,本文论述的巡检机器人最大可以跨越500×120×270 mm3的障碍物,满足所有主要障碍物的尺寸要求。
机器人结合使用GPS(global positioning system)、激光面阵传感器、接近传感器3种传感器于识别障碍物并逐级减速直至停止于障碍物前1 cm左右。首先通过GPS对比预加载的数据库数据,初判障碍物类型,并在前3 m处一级减速。接着使用一种激光面阵传感器扫描三维空间,实现前方障碍大小、方位和距离的判别,并在障碍物前30 cm二级减速。最后通过接近传感器做最后的精确定位并停止。
机器人机构模型图见图1,其车体通过陀螺仪检测和配重控制,始终保持水平。由于线路自身重力、机器人及障碍物重力的作用下,实际跨障过程中,线路与水平面有一定的倾角。依据相邻2臂高度差及实际运行情况,本机器人可克服的最大倾角为30°。
跨障过程可分解为3个臂的单独跨障,每个臂的跨障运动都是由相邻臂的支撑和自身臂的运动完成的,与第3个臂无约束关系,故可以不考虑第3个臂的运动。

表1 主要障碍物尺寸

图1 巡检机器人机构模型Fig.1 Mechanism model of the inspection robot
图2为机器人单臂跨障原理图,依次通过图2中6个状态的变换即可实现当前臂的跨越,其余2臂跨障过程非常相似,因此研究单臂跨障动作便足以替代整个跨障过程。单臂跨障有以下动作。
1)状态1到状态2的变化过程包含跨障臂从初始态到竖直态的摆动和相邻臂从初始态到中间态的相对移动(可视为机体的伸缩)。
2)状态3表示跨障臂滚动轮的打开。
3)状态4表示相邻臂驱动使跨障臂跨越障碍。
4)状态5表示跨障臂滚动轮的闭合。
5)状态5到状态6恰好是状态1到状态2的逆动作。
除去跨障臂滚动轮的开合动作,简言之,机器人跨障整体过程重复着一套动作,即跨障臂由行走位置摆动到竖直位置且机体同时缩短(状态1至状态2),然后机器人又按前一动作逆向运动到原来的行走状态(状态5至状态6)。
本文仅对典型的单臂跨障动作进行建模与控制,并分析其运动的合理性。

图2 巡检机器人单臂跨障原理图Fig.2 Spanning barrier principle diagram of the inspection robot with one arm
2 跨障动作运动学分析
机器人运动学分析包括正运动学分析和逆运动学分析,正运动学分析以各关节变量推算出末端相对于基端的位姿,而逆运动学则以末端位姿变换逆推出各关节变量的变化。由于本文重点在正向运动的控制,逆运动学分析便不做叙述。根据前文对动作的简化,对图2过程进行运动学分析。
将跨障动作中的运动关节抽象出来,进行D-H(Danevit-Hartenberg)建模(见图3),列出D-H参数表(见表2)。表2中:θ,d,a,α为D-H运动参数;Lm即后臂长0.3 m;Lz即前臂长0.35 m;q1即第1关节的关节变量-d1;q2即第2关节的关节变量θ2。根据运动学齐次坐标变换公式[9]可以得出正运动学变换矩阵T0H,推导过程如下[9-10]。

图3 机器人跨障过程简化D-H模型Fig.3 Simplified D-H model of robot in the course of spanning barrier
(1)
(1)式中:T01是第一关节坐标相对于基坐标的位姿变换;T1H或T12为末端坐标相对于第一关节坐标的位姿变换。
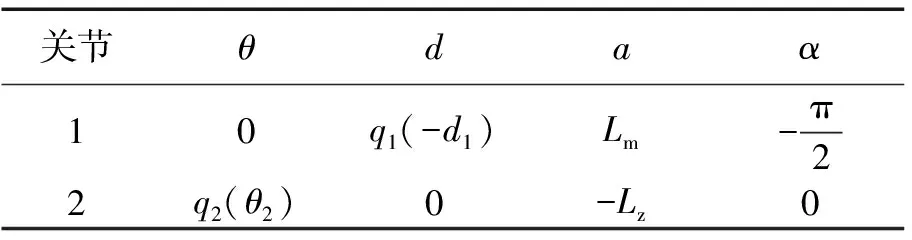
表2 D-H参数表
3 跨障动作动力学模型建立
运动学研究物体的运动,却不考虑引起运动的力。本章将在运动学的基础上,计算出期望的关节力矩即τ。常用的动力学建模方法有牛顿力学和拉格朗日力学,本文采用拉格朗日力学方法[9-12]。由于机器人单臂跨障可简化为2个关节的变化,可令关节变量向量q=[q1,q2]T和关节力矩向量τ=[τ1,τ2]T,并忽略扰动力矩和摩擦力矩,则其运动学方程可写成

(2)

忽略驱动力惯量,杆i(i=1,2)的动能为
(3)
(3)式中:T0i(T01/T0H)为齐次坐标变换矩阵;qj/qk(q1/q2)是关节变量;质量分布矩阵
(4)
(4)式中mi(m1/m2)为关节刚体质量,x,y,z为元质点dm的坐标表达式,积分都是对整个刚体体积积分;

假设所有的惯性积为0,则
di(d1或d2)是关节长度。
由(3)式推导出连杆动能矢量为
(5)
整个机器人的动能为
K=K1+K2
(6)

(7)
(7)式中:g为重力矩阵,与参考坐标系有关。故机器人整体势能为
(8)
可得拉格朗日动力学模型为
τ=K-P
将动能和势能及拉格朗日函数带入运动学方程,简化成
(9)
(9)式中:
p1=m1+m2,
p2=m2(2Lz-d2)/2,
(9)式为跨障最终动力学方程,其描述了控制器施加在各关节上的理想作用力。动力学模型代表的是机器人的动态特性,可为控制策略和路径规划提供支撑,为运动控制算法做铺垫。
4 运动轨迹控制算法
基于机器人动力学模型的控制方法有PD控制、计算力矩法、最优控制法等,但实际上,机器人是不确定性系统,并不能获得机器人精确的数学模型,因此,这些方法难以得到实际应用。本文采用了一种鲁棒、自适应相结合的PD控制方法。该控制方法优势在于,当误差较大时,通过非线性PD控制器可降低初始力矩;当误差较小时,自适应控制器可保证系统良好的动态性能[12-13]。
跟常规控制不同,鲁棒自适应PD控制增加对误差和扰动的处理,此时机器人动力方程为

(10)
(10)式中,ω为误差和扰动力矩,其范数满足

(11)
(11)式中:a1,a2,a3是正常数;e=qd-q为跟踪误差。
根据动力学特性可知,存在一个参数向量,使得满足线性关系(见 (9)式)
(12)
(13)
本机器人的误差扰动信号是有界的,假设已知其上确界,采用以下控制器和自适应律
(14)
u=[u1,u2]T,

(15)
(14)式中
Kp1=diag(Kp11,Kp12) ,Kp2=diag(Kp21,Kp22),
Kv1=diag(Kv11,Kv12) ,Kv2=diag(Kv21,Kv22),
其中,Kpij,Kvij,αi,βi均大(i/j=1,2)于零,Γ是正定矩阵。
文献[13]用李雅普诺夫函数证明了此控制器的全局渐近稳定性。
前面动力学模型最终式中,(9)式与(13)式相对应,为仿真需求,将其按关节拆开可分别推导出下面2关节动态方程分别为

图4 鲁棒自适应PD控制框图Fig.4 Block diagram of robust adaptive PD control
5 算法轨迹仿真
依据实际运行,机器人取q1=0.53 m,q2=58°时为初始行走状态。单臂跨障过程即为q1由0.53 m至0.5 m再回0.53 m,q2同步由58°至90°再回58°。假设机器人的动力器件加速度足够大,可忽略变速过程(实际运行中变速过程在极短时间内完成),再结合关节运动速度及实际跨障时间,单臂跨障关节变量理想运动轨迹见图5a和图5b中的期望轨迹。取输入信号即期望轨迹为
(18)
(18)式中:
q2d={58π/180,t∈[0,2)或[22,24]
π/2,t∈[9.5,14.5)

为仿真需求取正常数系数:a1=0.2,a2=0.3,a3=0.6。取PD参数Kp=Kd=diag(500,500),Γ=diag(5,5,5)。
机器人模型和控制律所有参数及变量确定后,利用MATLAB的Simulink平台进行仿真(仿真按照图4控制框图设计)。其中,控制框图的寻线臂模块采用动力学模型结果(16)式和(17)式编程,PD控制器模块内容为普通的闭环控制算法,关键编程在于鲁棒自适应控制器模块,其应用鲁棒自适应控制律对实际位姿及理想位姿进行运算,输出模型中参数p1,p2,p3。为进一步论证此控制算法的有效性和稳定性,将传统PD控制加入对比,仿真结果见图5a—图5f。
将依次载入鲁棒自适应控制和传统PD控制算法的机器人在实际线路上跨障测试。安装在中间臂移动电机的编码器采集距离数据,转换成实际长度,得到关节1轨迹,见图5a实际轨迹。关节2轨迹则通过跨障臂臂身及机器人机身的陀螺仪采集数据之差获得,这样能得到关节2相对机身的角度轨迹即q2,见图5b实际轨迹。当前编码器的测试精度是0.2 mm,陀螺仪的测试精度为0.3°。
图5a和图5b分别是关节1和关节2的跟踪轨迹,每幅图中依次显示期望轨迹、鲁棒控制仿真轨迹、传统PD仿真轨迹、鲁棒控制实际线路运行轨迹、传统PD实际线路运行轨迹。图5c和图5d为轨迹误差对比,图5e和图5f为力矩跟踪对比。
从仿真及实际轨迹图中可得出以下结论:鲁棒自适应控制和传统PD控制基本上都可跟踪期望曲线,误差及力矩基本都处于可控制范围;前者收敛速度比后者更快,且误差整体上更小,更加稳定;后者在轨迹拐点处振荡更为剧烈,控制效果并不如前者理想;由于算法判断阈值的存在,两者都有一定的稳态偏移,但明显后者较为严重;在考虑外界误差和干扰的前提下,前者在接近目标值时有小幅的振荡,但其收敛性和稳定性可以基本不受影响,说明其动态性能比后者好;更为重要的是在轨迹拐点处,前者可以有效地避免过大力矩的需求,以防动力器件的损坏。该仿真及测试结果分别在理论和实际上证明了鲁棒自适应PD控制算法的稳定性和优越性。
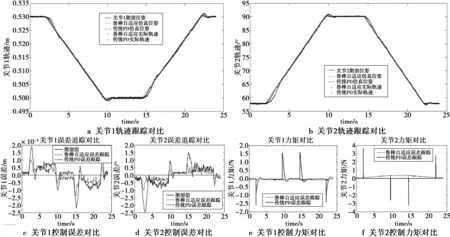
图5 机器人控制仿真曲线及实际线路运行轨迹Fig.5 Curve of robot control simulation & the trajectory of field experience

图6 机器人实际线路越障Fig.6 Inspection robot span the barrier in the field experience
实际线路试验成功地跨越障碍,见图6,其动作十分流畅,能近似完美的实现跨障动作,证明了此方法的有效性。
6 结束语
本文针对自主研发的新型三臂架空输电线巡检机器人跨障运动过程,建立运动学和动力学模型,为后续运动理论推理、控制系统设计和路径规划打下重要的基石。本文采用鲁棒自适应PD控制对运动轨迹进行跟踪控制,为验证所设计的鲁棒自适应控制律的有效性,对机器人的简化越障过程进行了仿真计算。Simulink仿真结果及实际线路试验证明,此控制方法能稳定有效地跟踪理想曲线,达到想要的控制效果。而且又将载入控制算法的机器人在实际线路上运行,并成功跨越障碍物,再次验证了算法有效性。同时,仿真和实际线路测试又加入了传统PD控制进行对比,验证了算法的稳定性和优越性。此控制方法也可应用到其他机械臂控制方面的研究中。
[1] RUI Guo. A Mobile Robot Prototype for Inspection of Overhead Bundled Conductors [C]// 10th IEEE International Conference on Control and Automation(ICCA).Hangzhou,China:IEEE, 2013: 12-14.
[2] POULIOT N , MONTAMBAULT S. Field-Oriented Developments for LineScout Technology and its Deployment on Large Water Crossing Transmission Lines[J]. Journal of Field Robotics, 2012,3(2):25-46.
[3] POULIOT N, RICHARD P L, MONTAMBAULT S. LineScout Technology Opens the Way to Robotic Inspection and Maintenance of High-Voltage Power Lines[J].IEEE Power and Energy Technology Systems Journal, 2015,2(1):1-11.
[4] 张明,吴功平.高压巡线机器人清障机械臂运动学建模与分析[J].武汉大学学报:工学版,2015,48(4):547-556. ZHANG Ming,WU Gongping.Kinematic modeling and analysis of wrecker manipulator of power line inspection robot[J].Engineering Journal of Wuhan University,2015,48(4):547-556.
[5] 李贞辉,王洪光.输电线巡检机器人自主抓线的控制[J].吉林大学学报:工学版,2015,45(5): 1519-1520. LI Zhenhui,WANG Hongguang.Line-grasping control for a power transmission line inspection Robot[J].Journal of Jilin University:Engineering and Technology Edition,2015,45(5): 1519-1520.
[6] 魏永乐,房立金,陶广宏.新型双臂巡线机器人越障过程受力分析[J].机械科学与技术,2014,33(8):1117-1121. WEI Yongle,FANG Lijin,TAO Guanghong.The Mechanical Analysis on the Crossing Obstacle Process of New-type Dual-arms Inspection Robot[J].Mechanical Science and Technology for Aerospace Engineering, 2014,33(8):1117-1121.
[7] 傅博,姜勇,王洪光,等.输电线路巡检图像智能诊断系统[J].智能系统学报,2016,11(1):70-77. FU Bo,JIANG Yong,WANG Hongguang,et al.Intelligentdiagnosis system for patrol check images of power transmission lines[J].CAAI Transactions on Intelligent Systems,2016,11(1):70-77.
[8] 王鹏,刘锋,梅生伟,等.高压输电线巡线机器人控制体系构建及动作控制器设计[J]. 清华大学学报:自然科学版,2011,51(7):921-927. WANG Peng,LIU Feng,MEI Shengwei,et al.Control structure establishment and control method design for high-voltage(HV) power transmission lines inspection robot[J]. Tsinghua Univ(Sci&Tech),2011,51(7):921-927.
[9] 蔡自兴.机器人学[M].北京:清华大学出版社,2009. CAI Zixing.Robotics[M].Beijing:Tsinghua University Press,2009.
[10] JOHN J C. Introduction to Robotics Mechanics and Control[M]. America:Pearson Education,Inc,2005.
[11] 杨德伟,冯祖仁,张翔.新型三臂巡线机器人机构设计及运动分析[J].西安交通大学学报,2012,46(9):43-54. YANG Dewei,FENG Zuren,ZHANG Xiang.Mechanism Desi-Gn And Kinematic Analysis of a Novel Tribrachiation Robot for Transmission Line Inspection[J]. Journal of Xi’an Jiaotong University,2012,46(9): 43-54.
[12] 白好杰, 唐大放, 曹建斌.机械手鲁棒自适应PD控制[J].机械传动,2011,35(11):34-60. BAI Haojie,TANG Dafang,CAO Jianbin.A Robust Adaptive PD Control Method of Robot Manipulator[J]. Journal of Mechanical Transmission, 2011,35(11):34-60.
[13] 刘金琨.机器人控制系统的设计与MATLAB仿真[M].北京:清华大学出版社,2008. LIU Jingkun.Design of robot control system and MATLAB simulation[M].Beijing:Tsinghua University Press,2008.
(编辑:张 诚)
The Science and Technology Support Program of Jiangxi Province(00406631100924020)
Motion trajectory control of overhead transmission line inspection robot in spanning obstacles
LIU Guoping, MIAO Hang, YU Zhendong, SUN Maowen, QIN Keji
(Robotics and Control Laboratory, School of Mechanical Engineering, Nanchang University, Nanchang 330031, P. R. China)
The novel tribrachiation overhead transmission line inspection robot is developed to help solve the maintenance problem of high-voltage transmission lines. The recognition scheme and movement scheme of spanning obstacles are put forward. The motion of spanning obstacles is simplified. With D-H(Danevit-Hartenberg) modeling method, kinematics modeling is established. On this basis, dynamic modeling is completed by Lagrange Mechanics method. Considering external disturbance and tracking errors, the robust adaptive PD control method is adopted for solving the trajectory tracking problem. In order to validate this method, the traditional PD control method is added. Using the ideal trajectory as the target trajectory, simulation trajectory of two methods are obtained by Simulink respectively. Carrying the two methods successively, the inspection robot run on the real line and the trajectory is obtained by sensors. The experimental results show that the trajectory of both methods is very close to the target trajectory. Compared with two methods by the tracking trajectory, the validity, stability and superiority of the adopted method are verified.
inspection robot; dynamic modeling; trajectory control; robust adaptive PD control
2016-06-12
2017-01-22 通讯作者:缪 航 lovemhgryx@vip.qq.com
江西省科技支撑计划(00406631100924020)
10.3979/j.issn.1673-825X.2017.03.018
TP242.2
A
1673-825X(2017)03-0396-07

刘国平(1964-),男,江西人,教授,博士。主要研究方向为智能机器人与视觉、机电智能控制系统。E-mail:liuguoping@ncu.edu.cn。

缪 航(1992-),男,江西人,硕士研究生。主要研究方向为智能机器人、工业机器人控制系统。E-mail:lovemhgryx@vip.qq.com
