携SAR微小型无人机系统研究
2017-06-19刘晓川沈冬刘玉宝
刘晓川 沈冬 刘玉宝
摘要:携SAR微小型无人机系统以微小型无人机为载体,搭载SAR进行全天时、复杂气候前沿战术侦察,并通过小型化通信设备构成的数据链路将SAR探测信息传送至地面,单兵利用轻质便携的地面设备进行SAR实时成像以及情报信息处理。本文介绍了携SAR微小型无人机系统的组成、特点及其工作过程,并对各部分的功能及关键技术进行了分析、阐述。该系统的使用能有效提高复杂战场环境下前沿部队的侦察和作战能力。
关键词:微小型无人机;SAR;数据链
中图分类号:TJ56;V279+.3 文献标识码:A 文章编号:1673-5048(2017)02-0033-05
0引言
随着现代战争的发展,掌握信息主动权已成为获得战争胜利的主要因素。特别是处于作战一线的前沿部队,便捷、实时、全天候获取战场信息是适应战场瞬时万变的前提。微小型侦察无人机具有易于部署、使用灵活、便于维护等显著优势,可以实时获取战场信息,在实际作战中得到了广泛应用,有效弥补了卫星和有人侦察力量的不足,是目前国内外装备数量最多的一种无人机。
在伊拉克战争、阿富汗战争中,美国海军陆战队以及陆军都大量部署了微小型无人机,其频繁参加战斗,有效支持了作战行动的开展。RQ-11A“渡鸦”无人机是微小型无人机的典型代表,美军已大约装备了3 000架。目前微小型侦察无人机普遍装备光电、红外传感器。这类传感器功耗较小,可获取可见光、红外波段的侦察影像数据,但受天气、环境、光学伪装手段的影响较大,降低了其实际使用效能。根据美军长期使用和研究发现,天气对光电/红外传感器的影响比对无人机的影响要大。美军在朝鲜半岛的侦察监视行动中,无人侦察机1年中有255天可以执行侦察任务,但其携带的光电/红外系统只有58天可正常工作;在巴尔干半岛1年中无人侦察机可以正常工作242天,而光电/红外系统只有83天。
合成孔径雷达(SAR)是一种高分辨率成像雷达,可在能见度极低的气象条件下以侧扫方式得到类似光学照相的高分辨雷达图像。由于其可克服云、雾、烟、尘、夜晚的限制,实施全天时、全天候、高分辨率侦察探测,同时抗干扰、反光学伪装能力强,引起了各军事大国的高度重视,逐渐在大中型无人机上得到装备。近年来,随着SAR关键技术的不断发展,SAR设备体积不断减小、重量降低,已经可加装到微小型无人机上,为前沿部队提供全天时、复杂气象条件下的信息获取手段。
针对携SAR微小型无人机进行前沿战术侦察的优点及技术发展,本文对携SAR微小型无人机系统的组成及工作过程、主要分系统功能及研制关键技术进行了论述及探讨。
1系统组成
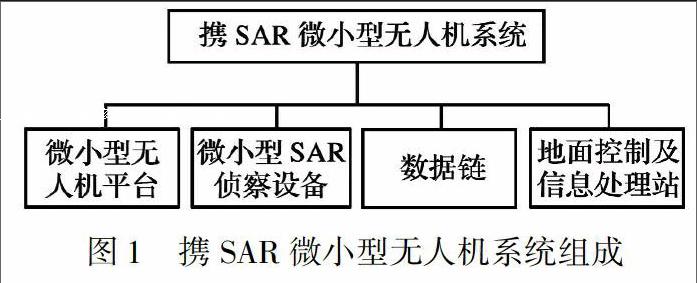
携SAR微小型无人机系统包括微小型无人机平台、SAR侦察设备、数据链、地面控制及信息处理站,其结构如图1所示。其中:微小型无人机平台包括无人机机体、自动驾驶仪、动力设备、发射与回收装置等;微小型SAR侦察设备包括微波子系统、数字子系统、稳定平台子系统等;数据链包括机载、地面通信模块和通信天线;地面控制及信息处理站包含计算机、液晶显示屏、大容量电池、操控装置。
为了便于前沿战术侦察使用,携SAR微小型无人机系统以及相关备附件总重量要求轻,同时设备分拆后的尺寸应符合单兵背负标准,才能便于携带。数据链通信半径一般要求大于10 km,连续飞行侦察时间应超过45 min。
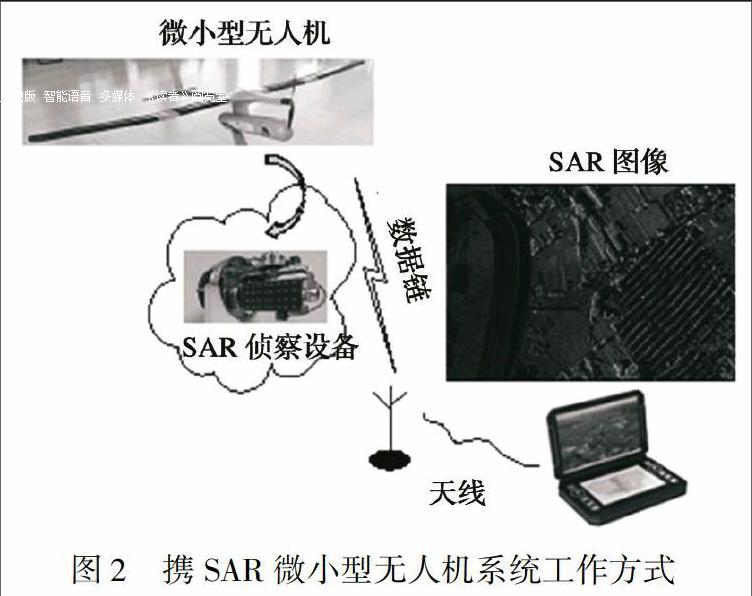
携SAR微小型无人机系统为前沿作战“侦察监视、打击效果评估”提供快速、安全的手段,形成全天时、复杂气候下灵活、便捷的战术情报获取能力,其系统工作方式如图2所示。
微小型无人机
微小型无人機采用单兵携带,弹射起飞,并根据任务规划进入预定侦察地域上空,完成全自主飞行;机载微小型SAR侦察设备进行全天时、复杂气候下的雷达波束发射和回波信息预处理;地面控制及信息处理站对机载SAR的工作模式、成像角度进行在线设定,并通过数据链路接收机载微小型SAR探测信息,完成实时成像和情报信息处理及显示。
2主要分系统
2.1微小型无人机平台
2.1.1无人机机体
无人机机体为任务载荷、机载设备和动力装置等提供装载空间,产生升力满足负载需求,形成足够的稳定性和操控力,使无人机能在飞行包线内稳定飞行,是影响无人机飞行性能的关键因素。
机体的总体、气动和结构等设计必须考虑无人机存储、运输以及整个飞行剖面的使用要求。微小型无人机采用杆式吊舱结构形式,进行模块化设计,动力、机翼、尾翼、任务载荷舱、机载设备舱等各个功能部件均相互独立,可拆分存储在较小的背包中,对于有故障的部件可直接替换,满足了单兵携带和便捷使用的要求。动力采用前置布局,有效降低手抛操作时高速螺旋桨造成人体损伤的风险。机翼采用小翼载设计,适应手抛速度低的特点,有效提高起飞安全性。伞舱采用融合式设计,在保证容积和负载特性的情况下,实现综合减阻。翼型设计以改善失速特性和增大巡飞低阻区范围为主要目标,一方面解决手抛起飞,迎角难控制,易失速的问题,另一方面能够使无人机在实际有风干扰的情况下始终以较高的气动效率飞行。
2.1.2自动驾驶仪
自动驾驶仪是无人机自主完成飞行任务的核心部件,其能够实现姿态稳定控制、自主导航飞行、任务载荷控制、异常情况处理等诸多功能。微小型无人机自动驾驶仪主处理部件是以低功耗Soc芯片为核心构成的飞控计算机,通过使用小型化的微型机电系统MEMS、气压高度计和北斗/GPS接收机等传感器采集飞行中的姿态、位置、速度等信息,执行机构采用扭矩大、转动精度高、速度快、尺寸薄的数字舵机。
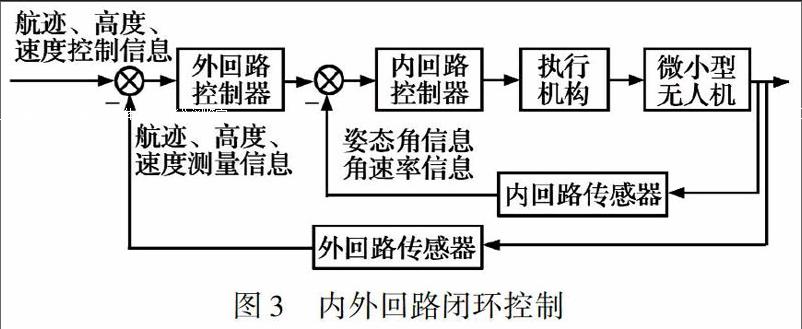
自动驾驶仪的控制律以PID(比例、微分和积分)控制为主,对飞行姿态的稳定和飞行航迹的控制通过传感器、飞控计算机和执行机构组成的内外回路闭环控制系统来实现,如图3所示。