基于视觉处理的Tripod机器人的几何定位与颜色识别
2017-06-19胡新强石红瑞
胡新强,石红瑞,王 强
(东华大学 信息科学与技术学院,上海 201620)
基于视觉处理的Tripod机器人的几何定位与颜色识别
胡新强,石红瑞,王 强
(东华大学 信息科学与技术学院,上海 201620)
文章旨在基于贝加莱Tripod机器人工作平台,进行机器人视觉的研究,给机器人增添不可或缺的眼睛。通过捕捉平台上图像传给计算机进行处理,进行高斯滤波、灰度化、二值化、霍夫变换等一系列操作实现几何体的几何定位与颜色识别。实验结果表明,该视觉系统实现了Tripod机器人对于物体的精准定位和颜色辨识。
图像处理;机器人视觉;几何定位
在工业生产中,经常需要将物体拾起,重新摆放到新的位置,这一工作动作单一,并且重复性大,交给人类来做,容易疲劳,也很难保证快速而准确的完成[1]。但是如果交给机器人来处理的话,将会轻松地完成这种工作,其准确性和快速性是人类所无法企及的。为此,需要采用合理算法,精准的控制机器人来帮助我们完成这项工作,提高企业的生产效率[2]。在现代的工业自动化生产过程中,机器视觉正逐渐成为一种提高生产效率和保证产品质量的关键技术[3]。
本次研究使用Tripod机器人及其工作平台,整套系统利用安装的摄像头,对工作平台进行拍照。获取平台上的图像,对其进行颜色和形状的识别,标定其坐标位置,为最后控制机器人将每个几何体拾起并放到正确的位置做好基本准备。
1 图像的采集
手机摄像头通过懒人支架安装在机器人的侧上方,这是找到的一个比较好的位置切入点,不会受到机器人运动的干扰,而且支架可以将手机很好地固定,可以实时跟踪平台情况。Tripod机器人平台如图1所示。

图1 Tripod机器人和操作平台
利用安装在平台侧上方的手机直接对平台进行拍照,然后将获得的数字图像传送给自己的PC,以便进行后期的处理。获得的原图像如图2所示。经过透视变换后图像如图3所示。

图3 透视变换
2 图像处理
2.1 图像滤波
为了得到比较高质量的图像,可以将采集到的原始图像进行先进行滤波操作。
此次实验中,我们采用高斯滤波的方式。它属于线性平均滤波的一种,采用的方式是对整幅图像进行加权平均,然后获取像素值。高斯滤波的具体操作过程:用一个模板扫描图像中的每一个像素,把模板确定的邻域内像素的加权平均值去代替模板中像素点的值。选用不同的算子进行高斯滤波,发现当算子为5×5效果比较好,得到图像如图4所示。

图4 高斯滤波
2.2 图像的灰度化与二值化
定义在RGB空间的彩色图像,每一个像素点都是由R,G,B 3个分量共同决定的,每个分量在计算机中所占的位数又决定了图像的深度,也就是每个像素点所占的字节数。对得到的RGB图像进行灰度化的过程,其实就是对图像的3个分量R,G,B进行加权平均得到最终的灰度值的过程。得到的灰度化图像如图5所示。

图5 灰度化图像
将得到的灰度化图像进行二值化,使图像只呈现黑白两种模式,采用自适应二值化方法得到图像如图6所示。

图6 二值化图像
3 图形的颜色识别
经过透视变换后的图像,几何体显示蓝色、黄色和橙色3种颜色,可以凭借肉眼很好地分别它们的颜色和形状。但是对于计算机处理来说,却远非如此。通过查表可知,3种颜色的RGB值分别为:橙色(255,165,0)、橙色(255,165,0)、蓝色(0,0,255)。经过阈值化发现黄色图像和橙色图像对颜色识别有干扰。选取不同阈值,进行比较:


图7 阈值化图像
通过观察上面几幅图像,不难看出,阈值不同时图形所示颜色区别很大,多次选取阈值进行比较后发现,当阈值选取为190时可以得到比较清晰的图像,而且颜色对比也比较鲜明,因此后续在此图像上进行处理,先经过这种变换,如图8所示。

图8 颜色转换
红色、黄色和蓝色3种颜色的RGB值容易被检测,检测出来后只需与变换前对应即可,黄色和蓝色不便,检测出来的红色即表示原图橙色。红、黄、蓝3色的RGB值分别为:(255,0,0),(0,255,0),(0,0,255)。
4 几何体的形状检测
霍夫变换技术是数字图像处理中的特征提取技术,通过在特定参数空间中计算累加结果的局部最大值得到一个满足某种具体形状的集合作为霍夫变换结果。霍夫变换包括圆检测和直线检两种方法,这种方法进行检测的好处是对噪声不是很敏感。提取需要的图形,进行ROI提取,获得的图形如图9所示。

图9 阈值分割
通过对像素值的平均计算,得出了中心点的坐标,分辨出了各图形的颜色,其结果如图10所示。

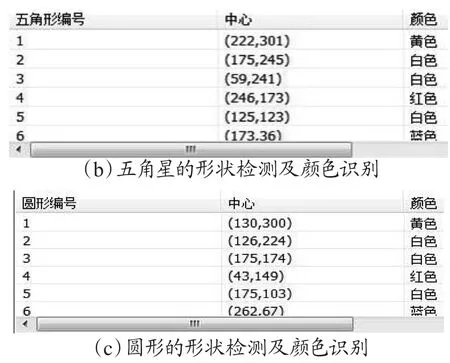
图10 几何定位与颜色识别
通过计算像素值,得出了几何体各个中心点的坐标,同时也检测出各个图形的颜色。经过这种方法,就锁定了Tripod机器人平台上各物体的位置,方便进行下一步的抓取工作,促进工业化生产。
5 结语
本文针对Tripod机器人的平台,完成几何体的颜色识别和定位。通过手机捕捉实验平台上的图像,对捕捉到的图像进一步处理,得出高斯滤波、灰度化、二值化后的图像。进行ROI提取,识别他们的颜色,求出几何中心点的坐标。
实验结果表明,此机器人视觉处理系统可用于精准定位,对Tripod机器人的推广使用具有深远的影响。
Geometric localization and color recognition of tripod robot based on vision processing
Hu Xinqiang, Shi Hongrui, Wang Qiang
(Ιnformation Science and Technology School of Donghua University, Shanghai 201620, China)
Based on B & R Tripod robot work platform, the paper aims to make a research of the robot vision and add indispensable eyes to robots. Through the processing of images from the platform to the computer, the geometric positioning and color recognition of geometry are realized by a series of actions such as Gaussian fi ltering, gray scale, binary and Hough transform. The experimental results show that such a visual system has finished the precise positioning and color identification of Tripod robot.
image processing; robot vision; geolocation
胡新强(1992— ),男,安徽安庆,硕士;研究方向:图像处理,智能控制。