电动方程式赛车的制动能量回收系统设计
2017-06-19黄启铭李明昊何秋熟
黄启铭,李明昊,何秋熟
(东南大学 a.电气工程学院;b.机械工程学院,江苏 南京 211189)
电动方程式赛车的制动能量回收系统设计
黄启铭a,李明昊a,何秋熟b
(东南大学 a.电气工程学院;b.机械工程学院,江苏 南京 211189)
为了提高东南大学FSE(Formula Student Electric大学生电动方程式汽车大赛)赛车的制动能量回收效率,研究采用基于回馈功率最大的制动控制策略和协调式制动的制动力分配方案,通过Labview编写控制程序,并对实际赛车电气系统(包括永磁同步电机、驱动器、电池)进行测试,基于Simulink进行仿真验证,调试出良好的制动性能,实现了长距离行驶状态下25.3%的能量回收效率。
永磁同步电机;电动方程式赛车;制动回收;混合制动
本课题研发的纯电动方程式赛车旨在参加由中国汽车工程学会组织的大学生纯电动方程式汽车大赛(FSE),包括22 km的耐久赛、高速避障、直线加速等比赛项目,以观察赛车整体性能[1]。因此,减少电池的总容量,减轻整车质量,提升赛车的动力性能是赛车研制的目标。而增加制动回收提高能量利用效率,是有效提高赛车性能的重要技术手段。对于制动回收,国外研究起步较早,美国Texas A&M大学的Yimin Gao提出了3种制动能量回收控制策略,得到了广泛应用[2-3]。Prius轿车的ECB制动系统能够实现四轮单独控制,只需一套制动系统就能实现车辆的常规制动、紧急制动、制动能量回收以及防加速打滑控制等技术[4]。国内研究方面,清华大学处于前列,张俊智等利用 dSPACE 硬件平台,开发了一种串联式再生制动系统,并进行道路试验,实现了在保证驾驶员制动感觉的前提下回收较多的制动能量[5]。但以上几类设计过于复杂,串联式再生制动的液压系统虽然回收效率高但质量体积较大,无法安装在可用空间极小、轻量化程度极高的赛车上。本课题搭建的电动方程式赛车电气系统(包括永磁同步电机、驱动器、电池),使用LabView编写程序,先后确定合适的控制策略和简单高效的制动力分配方案,取得了较短的制动时间和较高的回收效率。
1 制动方案研究
制动控制分为2种:能量回馈制动和能量消耗制动。永磁同步电机的反电势能够提供所需的制动电流时,电流将流向电池,电机工作在能量回馈状态;当永磁同步电机的反电势不足以提供所需的制动电流时,电池将会提供剩余的制动电流,二者电流之和共同消耗在电机的电阻上,此时电机工作在能耗制动状态[6]。
以本赛车平台为例,踩下制动踏板后,永磁同步电机工作在发电机状态,车轮依靠惯性作为原动机带动转子旋转,电枢绕组的三相电流与永磁体的气隙磁场相互作用产生与转子转向相反的电磁转矩,迫使车轮减速。
对于电驱动车辆,引入制动能量回馈后,须考虑将总的制动力需求在摩擦制动力和回馈制动力之间进行分配,以实现二者的协调控制。混合制动回收方案有3种:叠加式制动、协调式制动与串联式制动。如图1所示。采用叠加式制动时,回馈制动力与摩擦制动力都与制动踏板行程(开度)正相关。采用协调式制动时,所需制动力首先由回馈制动力提供,当踏板行程超过预设值时,回馈制动力不再增加,所缺的制动力全部由摩擦力提供。采用串联式制动时,若踏板行程在预设值内,制动力由回馈制动力与摩擦制动力共同提供,且两者具体大小关系可以任意改变。踏板行程超过预设值后,额外的制动力全部由摩擦制动力提供。
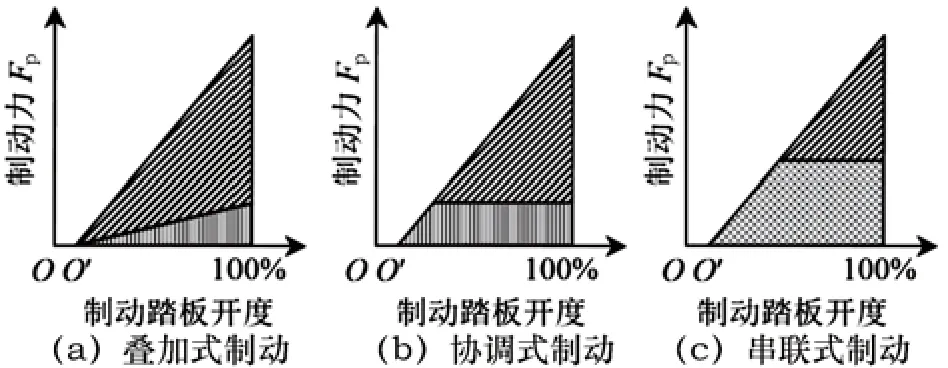
图1 3种制动控制策略制动力分配示意图
由图1可见,叠加式制动所能回收的能量较少;协调式制动所能回收的能量较多;串联式制动由于回馈制动力灵活可变,能保证电机始终工作在最佳工作区域,回收的能量最多[6]。但是此时制动系统摩擦力大小与踏板行程的关系需要快速变化,又由于制动踏板与制动片是通过机械结构连接的,缺乏便捷可靠的机械结构来实现此功能。综合考虑安全性、回收效率与硬件实现的可能性,本课题选用协调式制动方案。需求的制动转矩首先由电机制动转矩来提供,制动需求大于电机额定制动转矩时,才由机械制动来提供剩余制动力。
2 硬件实现
2.1 整车电气系统结构
整车电气系统由2部分组成,见图2,上半部分为高压驱动电路,由电池组提供的300 V直流电经驱动器逆变为300 V的三相交流电,驱动永磁电机工作;在制动状态下电机工作在回馈制动模式,产生的电流经驱动器给电池充电。下半部分为低压控制电路,用于处理各传感器采集的信号,包括BMS(Battery manage system电池管理系统)、稳压模块、主控模块与非可编程运算电路模块,由一块独立的24 V锂电池供电以提升稳定性。
2.2 高压驱动电路
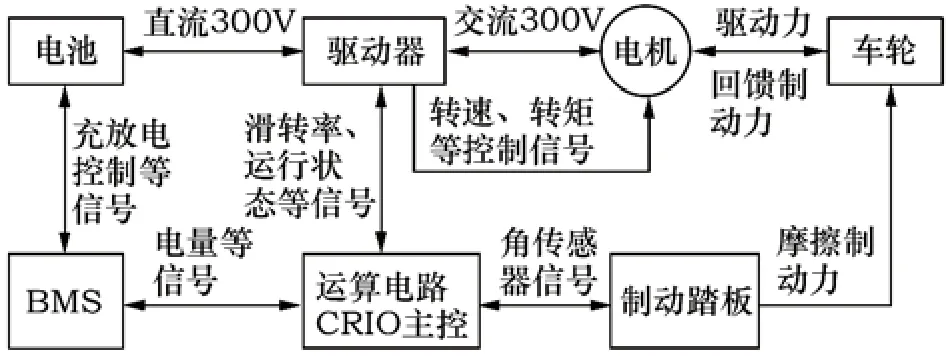
图2 电气系统图
高压驱动电路是赛车动力系统,由300 V电池组、2只Bamocar -D3驱动器、2台永磁同步电机等组成。同步电机安置在车辆后部,通过行星轮减速器分别连接左右车轮。
赛车正常运行状态下,电池组提供300 V的直流电,经过驱动器中内置的逆变器逆变为300 V的三相交流电使电机正常运转,同时驱动器也控制电机的转速与转矩以适应加速、转向等情况。当踩下制动踏板时,电池组收到BMS指令即停止供电进入充电模式,驱动器工作在整流模式将电机发出的交流电整流后输送到电池,实现能量回收。
2.3 低压控制电路
低压控制电路用于检测与处理赛车上各传感器信号,包括踏板角传感器、加速度计、温度传感器、轮速传感器等。由BMS系统、稳压模块与运算电路模块构成,运算电路模块又包含可编程的主控电路和非可编程的运算电路。与车辆安全相关的信号(如惯性开关状态、制动灯状态等)接入非可编程运算电路以提高安全性,实现启动鸣笛、紧急制动、紧急断电等功能。滑转率计算、后轮差速等涉及到车辆控制的信号由主控电路中的ARM处理器处理。
当驾驶员踩下制动踏板时,角位移传感器将踏板角度传送至主控,若踏板角度小于摩擦制动的预设值,赛车仅进行回馈制动。此时主控通过向驱动器发出信号控制电机运行方式,同时主控与BMS系统协作控制电池组进行充电。若踏板角度大于摩擦制动的预设值,除了上述过程,踏板还通过调校好的机械结构直接控制制动卡钳,用产生的摩擦力弥补所缺的制动力。
2.4 硬件系统设备配置
纯电动方程式赛车的动力系统是整车性能最直观的体现。相比其他类型电机,永磁同步电机具有效率高、损耗小、功率因数高、伺服传动系统性能高、定位准确等特点,在能量回收方面具有更大的优势。为了展现优异的动力性能,选用德国Enstroj公司生产的EMRAX 207电机。该电机单台峰值功率可达80 kW,重仅9.4 kg,其不仅具有较高的转速与扭矩,还具有体积小、功率密度高的特点。与之配套的Bamocar-D3 控制器准确性高,调控能力强。电机的主要参数如表1所示。驱动器的主要参数如表2所示。

表1 电机的主要参数
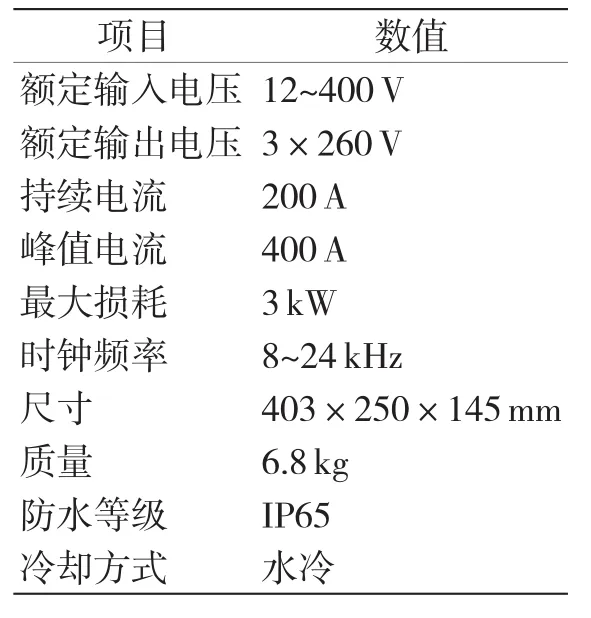
表2 驱动器主要参数
3 试验结果与分析
3.1 控制算法试验
此试验旨在通过LabView编写缩短延迟时间、加入PID控制的实时调整转差率程序和防制动抱死程序,改进国内外现有的制动控制算法[7-8],使用基于回馈功率最大的制动控制策略,试验中车手驾驶赛车在预先规划好的路线上以相同的驾驶方式行驶两圈,分别烧录改进前后的制动控制算法,利用BMS记录功率数据。测试时车辆总质量320 kg。
控制算法改进前后系统功率曲线见图3。改进前耗能144.4 kJ,回收能量6.21 kJ,回收效率4.3%。改进后耗能147.9 kJ,回收能量37.4 kJ,回收效率25.3%。改进电机驱动器的控制策略后,可以明显提高回收效率。
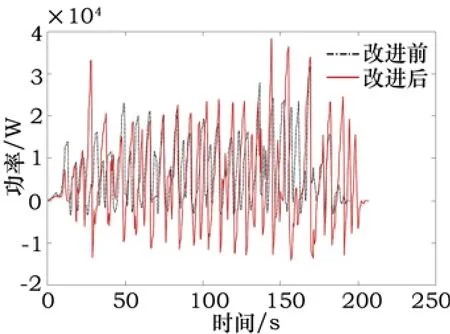
图3 改进前后回收效果
3.2 不同速度、不同的机械制动力下回收效果试验
此试验旨在测试合适的制动力分配方案,并在较短的制动时间和较高的能量回收效率之间取得平衡。测试时车辆总质量320 kg。赛车加速到预定速度后,由车手将制动踏板踩到最大行程即施加预设的机械制动力,赛车减速直至停止,主控模块和BMS记录时间、速度、功率信号。由图 4可见,低速状态下(30 km/h)采用改进后的制动控制策略后,机械制动力变大,制动所需时间缩短,但回收效率降低。
由表3可见,中低速状态下(50 km/h)机械制动力从35%增加到55%后,回收效率略有降低,但制动时间显著缩短;而机械制动力从55%增加到65%后,制动时间略有缩短,但回收效率大大降低。中低速状态下,机械制动力选择55%,可在制动时间和回收效率间取得较好平衡,因此高速状态下着重研究55%附近规律。
由表4可见,高速状态下(70 km/h)制动力的微小改变对制动时间的影响很小,但对回收效率影响很大。此时行驶路面的情况对制动时间的影响不可忽略,所以制动时间的变化与表3中的规律略有不同。对比以上表格可以发现车速越快回收效率越高,这是因为采用了基于回馈功率最大的制动控制策略而非恒转矩控制策略,在低速时电机的力矩降低,回收的能量相应减少。
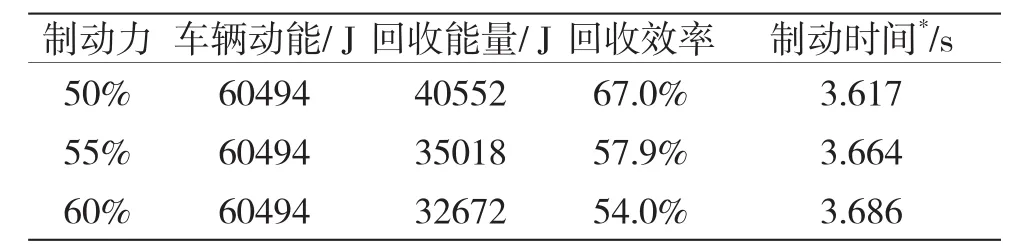
表4 70 km/h不同机械制动力下测试结果
3.3 仿真结果验证
为了验证采用基于回馈功率最大的制动控制策略的有效性,基于Matlab/Simulink软件设计了如下仿真试验[9]:输入信号为油门(制动)信号,观察使用制动回收策略前后车速和电池输出功率的变化。如图5所示,0~5 s内的信号作为仿真输入。在0.6~1.6 s时,油门信号增大直到稳定在1,持续到2.5 s。之后油门信号减弱至0,制动信号增强至1。
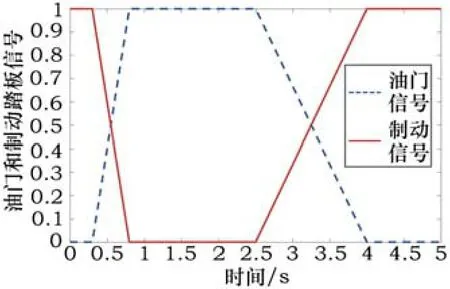
图5 油门和制动踏板信号随时间变化关系图
由图6、图7可见,车速变化、电池输出功率与油门信号吻合。电池输出功率仿真结果与赛车实际测试结果曲线基本吻合。由于4 s后制动信号到达最高,电机进入回馈制动状态,电池输出功率为负即电流对电池充电。电池回馈功率大小与电机的电磁转矩、电机电角速度有关。在有变速器的驱动系统构型中,电机电角速度可与车速解耦,并通过变速器和电机输出转矩同时调节电机的工作点,使其工作在高效率区。本次实验采用只有固定减速比减速器的驱动系统构型,由于电机电角速度与车速耦合,因此,只能通过调节电机的输出转矩来达到最优的制动能量回收[3]。
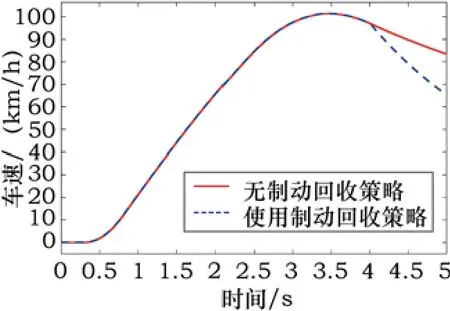
图6 车速仿真结果
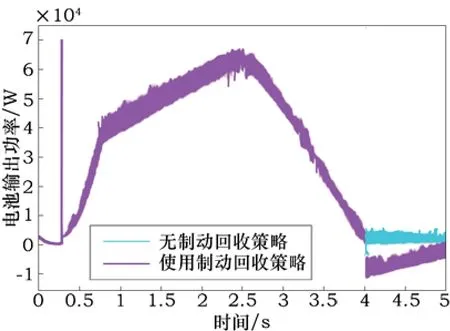
图7 电池输出功率仿真结果
4 总结
对于FSE赛车,制定合理的制动回收策略,最大化地回收制动能量,能够有效地减少电池容量、减轻整车质量,对提升赛车的性能具有重要的意义。本课题通过建立完整的电气系统,进行实车测试及仿真试验,证明本赛车平台使用基于回馈功率最大的制动控制策略可获得较高的回收效率,机械制动力调整为55%时在制动时间和回收效率间取得了较好的平衡。
[1] 中国汽车工程学会.中国大学生方程式汽车大赛规则(2015最终版)[Z],2015.
[2] Gao Yimin,Chen Liping, Ehsani Mehrdad. Electric Braking System of EV and HEV—Integration of Regenerative Braking[C].Automatic Braking Force Control and ABS.Ronald K. Jurgen. Future Transportation Technology Conference & Expositio,Costa Mesa, CA,USA, 2001.SAE International, 2004:733-780.
[3] J.S.Dunning.Electric vehicles and battery technology[C]. Proceedings of Int.Symp.Low-Pollution Vehicles, 1990:13-17.
[4] 汪永嘉.纯电动赛车再生制动系统的仿真研究[D].合肥:合肥工业大学,2014.
[5] 方运舟.纯电动轿车制动能量回收系统研究[D].合肥:合肥工业大学,2012.
[6] 卢东斌,欧阳明高,谷靖,等.电动汽车永磁同步电机最优制动能量回馈控制[J].中国电机工程学报,2013,33(3):83-91.
[7] 赵辉,刘彤彦.电池供电的永磁电动机系统的再生制动[J].电机与控制学报,1999(4):207-210.
[8] GU Jing,OUYANG Minggao,LI Jianqiu,etc.Driving and Braking Control of PM Synchronous Motor Based on Low-resolution Hall Sensor for Battery Electric Vehicle[J]. Chinese Journal of Mechanical Engineering,2013,26(1):1-10.
[9] Tien-Chi Chen,Tsai-Jiun Ren,Yi-Shuo Chen,etc. Driving and Regenerative Braking Method for Energy-Saving Wheel Motor[C]. Sice Conferenc,2010:2654-2659.
(编辑 凌 波)
Regenerative Braking System Designed for Electric Formula Car
HUANG Qi-minga, LI Ming-haoa, HE Qiu-shub
(Southeast University a.School of Electrical Engineering;b. School of Mechanical Engineering,Nanjing 211189, China)
Aiming at improving the regeneration efficiency of the electric Formula Car from South East University, the regenerative braking control strategy and the allocation scheme between the parallel braking forces are adopted in this paper. The control program is written on LabView and the decision is tested on the electric drive system of an electric Formula Car(including PMSM, inverter and battery cells) and is proved by Simulink simulation. A favorable braking performance and 25.3% regeneration efficiency under long-distance driving condition is obtained.
permanent magnet synchronous motor (PMSM); electric Formula Car; regenerative braking;composite braking
U469.696
A
1003-8639(2017)05-0001-04
2017-03-09
国家级大学生创新训练项目(201610286092)
黄启铭(1995-),男,主要研究方向为新能源汽车制动能量回收。