重型货车右转弯事故的原因分析与对策研究
2017-06-19周明李平飞刘娜
周明,李平飞,2,刘娜
(1.西华大学汽车与交通学校,四川 成都 610039;2.四川西华机动车司法鉴定所,四川 成都 610039)
重型货车右转弯事故的原因分析与对策研究
周明1,李平飞1,2,刘娜1
(1.西华大学汽车与交通学校,四川 成都 610039;2.四川西华机动车司法鉴定所,四川 成都 610039)
为研究重型货车右转弯行驶过程中交通事故发生的机理及对策,课题以四川西华机动车司法鉴定所交通事故鉴定数据及国家车辆事故深度调查体系(NAIS)深度调查数据为依托,收集重型货车右转弯交通事故数据,并对收集的数据进行原因分析和统计分析,提炼出个性和共性的规律、主要原因等数据。在此基础上提出在右转弯事故中预警区域的概念,并针对该区域提出货车驾驶员和车外人员辅助预警系统,对避免车外人员进入危险区域起到预警作用。运用Pc-Crash软件,以一起重型货车右转弯所引发的交通事故案例为研究对象,对事故过程进行仿真分析,验证了预警系统的可行性。为局部微观控制乃至落实具体的事故防范措施提供准确的依据,并提出有效的整治方法和相应措施。
重型货车;交通事故;Pc-Crash软件;预警系统
CLC NO.: U461 Document Code: A Article ID: 1671-7988 (2017)09-84-04
引言
根据中华人民共和国道路交通事故2014年统计年报显示重大交通事故特点显示重型货车肇事事故上升[1]。货车转弯所引发的伤亡事故比例也在逐年增加。因此,研究涉及重型货车的交通事故的原因及预防对策具有重要现实意义。现阶段国内外主要通过增加货车右侧后视镜的数量来防止右转弯事故的发生,通过增加货车侧面护栏来防止行人和骑行人被卷入车底[2],Mobileye公司利用摄像头和雷达检测和识别前方道路环境,在有可能发生事故时给予报警提示,如果驾驶员没有反应,AEB(Autonomous Emergency Braking)系统将会自动制动。该技术避免了38%的追尾事故。但是货车右转弯事故频次依然较高,而且致死率很高。
1、货车右转弯交通事故数据分析
针对四川西华机动车司法鉴定所及国家车辆事故深度调查体系(NAIS)深度调查获取的重型货车右转弯交通事故案例进行调查研究,选取16起典型案例进行统计分析。
1.1 货车右转弯交通事故时间统计分析
从图1(横坐标为一天内各时短,,纵坐标为各时段事故次数)统计结果可以看出,货车右转弯交通事故主要集中在白天,其中6:00-20:00所发生的事故占总事故的71%。主要原因是白天道路上的行人及非机动车比夜间多。
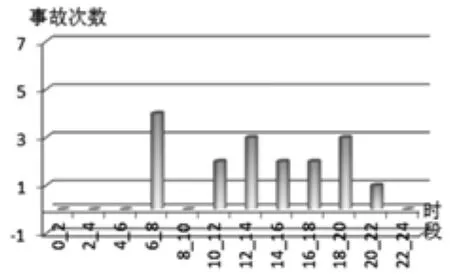
图1 货车右转弯交通事故时间分布
1.2 货车右转弯交通事故涉事方类型统计分析
从图2统计结果可以看出,货车右转弯交通事故中二轮电动车约占统计交通事故涉事方总数的65%,二轮自行车占统计交通事故涉事方总数的12%,二轮摩托车占统计交通事故涉事方总数的23%。
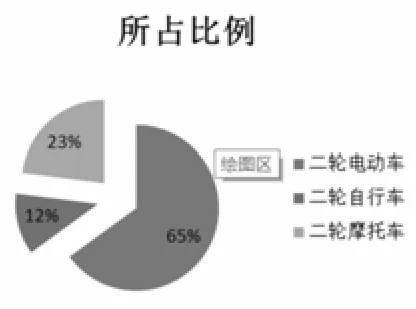
图2 货车右转弯交通事故涉事方
1.3 货车右转弯交通事故货车第一碰撞点统计
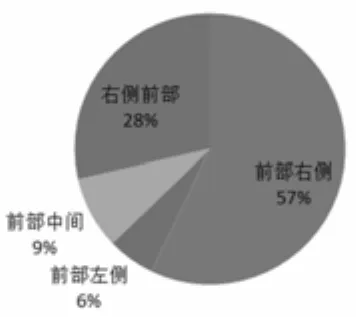
图3 货车右转弯交通事故第一碰撞点位置
从图3统计结果可以看出,货车右转弯交通事故中第一碰撞点集中分布在货车前部,其中前部右侧和右侧前部分别占在事故数的57%和28%。
2、货车右转弯交通事故原因分析
通过对以上统计结果进行分析,可以看出货车右转弯事故高发及其致死率较高的主要原因有:
(1)视野盲区
从上面的统计结果可以看出,货车右转弯交通事故中,货车类型多为重型混泥土罐车和重型自卸货车,对重型货车而言,其轮胎大,驾驶室高,受害者往往倒在前轮和前后轮之间,被碾压致死。然而因视野盲区而造成的对车身右侧一定范围内的骑行人员活动无法知晓,虽然货车右侧后视镜处安装了多面镜,扩大了驾驶员的视野范围,但是还有很大的限制,人在正常静止的状态下,人眼前方水平方向上的可视角度为210度左右,而这区间内大约只有60度的范围是人眼视力最为集中的区域,人眼在直前视线范围为上方50度~55度、下方60度~70度,其中最为集中的区域是上下各15度的范围,也就是说人眼天生就存在着视力盲区[3](如图5所示);在驾车中,视力盲区带来的影响更加明显,因为人眼的集中可视区域会随着车速的增加而逐渐缩小,眼睛两侧的事物快速滑过,注意力逐渐向正前方集中,所以盲区的范围也变得更大,在骑行人员距离货车较近时、天气情况较差时和驾驶员疲劳时等,驾驶员难以观察清楚,导致事故发生。

图4 货车的盲区
(2)内轮差
驾驶员在行车过程中如果只注意前轮的行进轨迹而忽略内轮差[4]的存在,就很容易使车后轮驶出路面或者与转向侧其他物体发生碰撞。在路口转弯时骑行人员常被右转弯的货车侧面刮倒后碾压;从骑行人角度看,认为车辆前轮过去了就应该没有危险,急忙过路,没有认识到内轮差的存在所以最终躲闪不及。
下图为一般车辆的转向路径图,根据内轮差(百度)的定义有:
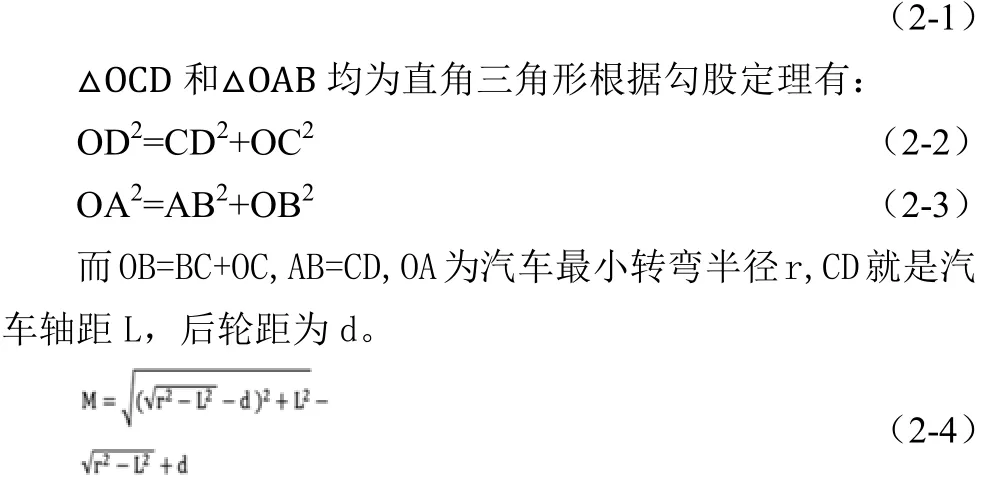
内轮差并不是一个固定的数值,一般情况下,就唯一变量而言在其他数据一定的情况下可得以下结论:轮距越大,内 轮差越大;轴距越大,内轮差越大;最小转弯半径越小,内轮差越大;方向盘转角越大,内轮差越大。

图5 右转弯路径图
根据统计车型的最小转弯半径、后轮距和轴距,可以计算出货车右转弯内轮差M集中在0-2m之间。所以货车右转弯时,车外人员位于货车右侧横向距离右前轮两米范围内时,易发生事故。所以,货车右转弯时,其右侧横向距离右前轮两米范围内是一危险区域。
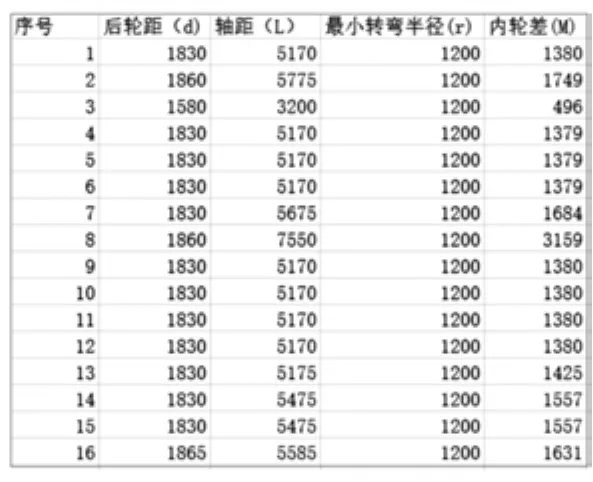
图6 车辆参数
(3)驾驶员和骑行人安全意识淡薄
通过统计驾驶员口供发现70%货车驾驶员的行为及其相似,在路口遇到绿灯时驾驶人直接右转弯,没有注意处于旁边车道的骑行人员,从思想上认为行人会主动避让,麻痹大意。从骑行人角度看,认为车辆前轮过去了就应该没有危险,急忙过路,没有认识到内轮差的存在所以最终才躲闪不及。
(4)中国特殊的道路交通环境
中国特殊的道路交通环境包括低水平道路基础设施和道路使用者的违规行为[5]。通过警方提供的货车右转弯交通事故资料显示超过80%的事故道路横断面位置都为机非混合车道。
3、货车右转弯交通事故对策
通过对16起案例进行事故再现,发现,每一起事故中货车和二轮车存在时间和空间上的交叉点,二轮车的运动多为直线运动,而货车的运动则分为两个基本运动:第一是平行于自行车的运动轨迹,第二是绕一个固定的圆心做圆周运动[6]。由深度调查测得事故现场车辆紧急制动痕迹长度为7.6~11.9m。因重型货车与骑行人质量相差较大,故在不考虑碰撞过程中能量损失的情况下,根据GA/T643—2006《典型交通事故形态车辆行驶速度技术鉴定》[7]中的常用基础公式(1),计算货车碰撞瞬时速度:

式中:v为货车在采取制动措施时的行驶速度km/h;g为重力加速度,取9.8 m/s2;φ为车辆制动纵滑附着系数,取0.7;t为制动协调时间,取0.1-0.2 S;S为事故车在地面留下的车轮制动印痕长度;通过计算事故车的碰撞瞬时速度集中分布在30-45km/h。二轮车的车速集中分布10-20km/h。转弯之前货车右边缘和二轮车的垂直距A离集中在1-3m之间。货车发生事故后的制动减速度集3.92-6.86m/s²。碰撞前一秒时二轮车相对货车的距离L集中分布在货车右前侧0m-7m处(见图7)。
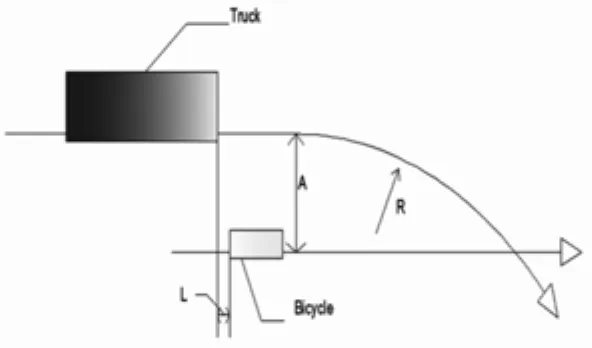
图7 货车右转事故的相关参数
根据上述统计分析数据和货车所存在的内轮差及视野盲区,将16起货车右转弯事故再现并获得事故发生前的运动形态,可建立货车右转弯安全距离预警区域,如果货车在右转弯中预警系统探测到在该区域有二轮车通过时,该系统则对驾驶员给予警告,驾驶员采取防范措施则此事故可被避免。考虑到货车驾驶员的反应时间和制动器间隙故可将货车预警系统分为三个等级,分别是初级预警、中级预警和高级预警。初级预警,当预警系统探测到前方是弯道时,根据周围是否有二轮车,二轮车与货车的水平距离在0m-3m内时,垂直距离在7m-15m时预警系统给予驾驶员短暂的报警警报,此时驾驶员只需轻踩制动踏板就可避免该事故的发生,中级预警,当预警系统探测到前方是弯道时,根据周围是否有二轮车,二轮车与货车的水平距离在0m-3m时,垂直距离在0m-7m时预警系统给予驾驶员短暂连续的报警警报,此时驾驶员必须将制动踏板踩到最低位置或者不转弯才可避免事故的发生。高级预警,当预警系统探测到前方是弯道时,根据周围是否有二轮车,二轮车与货车的水平距离在内轮差范围之内时,预警系统给予驾驶员连续报警警报,此刻驾驶员必须将制动踏板踩到最低位置并且改变原来的转向。
4、仿真分析
2015年6月,在成都市高新区敬成路与蓉北路路口,一辆豪沃牌自卸汽车与一辆二轮摩托车发生碰撞。事故造成二轮摩托车当场死亡。事故参与方最终位置如图(8)所示,利用PC-crash9.0软件对事故现场进行仿真模拟。在车辆数据库中找到货车的模型,按实际测量的尺寸和该车型的公告参数对车辆的外形进行修改;设置车辆的制动减速度6.87m/s2,测量得到的地面摩擦系数0.7。导入骑行人多刚体模型,并根据尸检报告修改人体参数模型,用公式发计算得到的货车车速约为46 km/h为参照和实际所测量二轮车的参数对模型进行修改。

图8 道路交通事故现场图
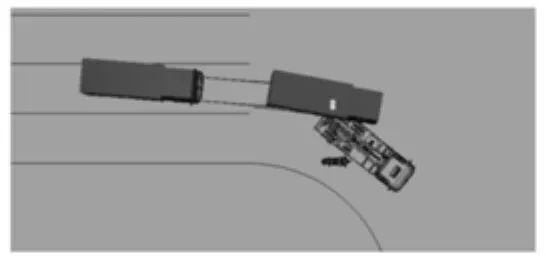
图9 执行高级预警仿真效果
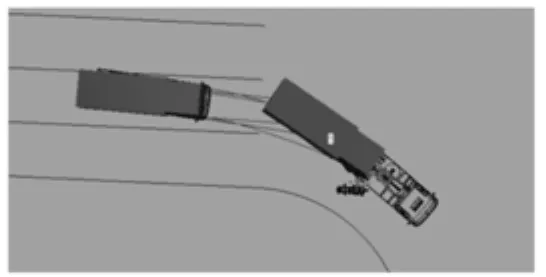
图10 执行中级预警仿真效果
仿真分析的结果真实的还原了本次事故各个参与方的运动形态,利用真实案例对预警系统进行验证,在发生事故前分别执行初级预警、中级预警。高级预警如下图所示。各个级别预警系统可有效避免事故的发生。
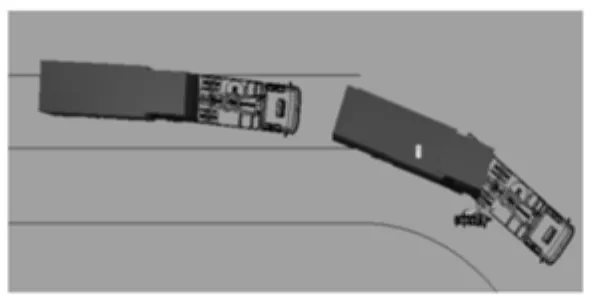
图11 执行初级级预警仿真效果
5、结论
(1)右转弯事故中,货车多处于主动撞击状态,货车右前部将骑行人员撞到后经车轮碾压致其死亡。
(2)提出货车右转弯交通事故的驾驶员和车外骑行人员辅助预警系统,为ADAS(先进驾驶员辅助系统)开发提供理论依据。
(3)对驾驶员的安全教育要加强,严禁超速、疲劳驾驶、违章驾驶等,驾驶员本人应该提高安全意识。骑行人员在路口看到货车时应尽量远离。提高大货车生产的技术标准,汽车生产厂家和货运企业在设计中,可以在货车右前侧安装可移动式防护栏,在公路上行驶时可开启护栏防止骑行人被撞到后碾压致死。
[1] 公安部交通管理局.中华人民共和国道理交通事故统计年报(2014年度).
[2] 基于LS-DYNA仿真分析的货车侧部防护装置研究 南昌工程学院学报
[3] https://www.baidu.com.
[4] 车辆内轮差问题的优化分析.科技世界.
[5] 货车右转弯事故原因分析.
[6] Development of a Test Procedure for Driver Assist Systems Addressing Accidents Between Right Turning Trucks and Straight Driving Cyclists.
[7] GA/T643-2006.典型交通事故形态车辆行驶速度鉴定.
Research on the cause of the accident analysis and countermeasure of heavy duty truck right
Zhou Ming1, Li Pingfei1,2, Liu Na1
( 1. Shool of Transport&Automotive, Xihua University, Sichuan Chengdu 610039; 2.Sichuan Xihua Vehicle Forensic Institute, Sichuan Chengdu 610039 )
For the study of heavy duty truck right in the process of the driving mechanism and countermeasures of traffic accidents, This topic in sichuan xihua appraisal of motor vehicle traffic accident by judicial authentication data depth and the national vehicle accident investigation system (NAIS) depth based on the survey data, collection of heavy truck right turn traffic accident data, and reason analysis of the collected data and statistical analysis to extract data such as the rule of individuality and commonness, the main reason. Based on this, advances in safety area, right the accident early warning area, the concept of dangerous areas, truck drivers and vehicles are put forward based on the area personnel outside the auxiliary warning system, to avoid the warning effect personnel outside the car into the danger zone. Using Pc - Crash software, together with heavy truck traffic accident cases which caused by the right as the research object, by simulating the process of the accident, verify the feasibility of early warning system. For local micro control and implement the specific preventive measures against accidents to provide accurate basis, and effective treatment method and corresponding measures are put forward.
heavy duty truck; traffic accident; Pc-Crash software; early warning system
U461
A
1671-7988 (2017)09-84-04
10.16638/j.cnki.1671-7988.2017.09.031
周明(1992-)男,江苏宿迁,硕士,就读于西华大学汽车与交通学校。主要从事道路交通安全方面的研究。基金项目:西华大学研究生创新基金(ycjj2015153)。资助项目:国家车辆事故深度调查体系项目(14203245);西华大学研究生创新基金资助(ycjj2015154)。