基于惯性导航的人员定位系统研究
2017-06-13汪少初
摘 要:分析了全球卫星导航系统(GNSS)、无线电定位和惯性导航定位各自的优劣势,提出基于惯性导航的人员定位系统设计。为减小系统随时间的累计误差,引入高精度地图和精细化三维模型等基于场景的位置融合算法,最大限度地从系统误差源等因素出发,提出相应的解决办法以提高定位精度。
关键词:惯性导航;定位;融合
DOI:10.16640/j.cnki.37-1222/t.2017.11.157
1 引言
近年来移动GIS的迅猛发展,人们对定位与导航的精度需求也在不断增长。公元十三世纪,中国人发明了指南针并以此穿越南中国海。1942年德国在V-2火箭上率先应用惯性导航系统,极大地刺激了精确定位的需求。无线电技术的高速发展使得定位所需的若干解算参数均可通过研究无线电波的传播特性得到,GNSS应运而生。
为了克服GNSS只能应用于空旷室外的劣势,基于UWB、Zigbee和RFID等低成本、低功耗、高精度的室内定位方案相继出现,并呈现出实时定位的发展趋势[1]。随着惯性测量单元(IMU)性价比不断提高,基于惯性导航的室内定位技术已成为研究热点。IMU与人体捷联,利用惯性导航原理计算行进的步长、电子罗盘搭配陀螺仪可实时测量每一步前进的方向,进而推算人员的位置。
基于无线电的室内定位方案,需要前期在定位所覆盖的区域内铺设一定密度的参考定位信标,成本与区域的面积成正比。惯性导航系统的设备体积小,不需要在定位覆盖的区域进行前期的安装和特征测量 [2],系统不受室内还是室外环境的限制,成本仅与目标的数量有关,非常适合大规模应用;劣势在于系统的累计误差随时间呈指数增长[3]。如何减小累计误差实现高精度室内定位成为该领域研究的重点和难点。
2 基于惯性导航的人员定位系统
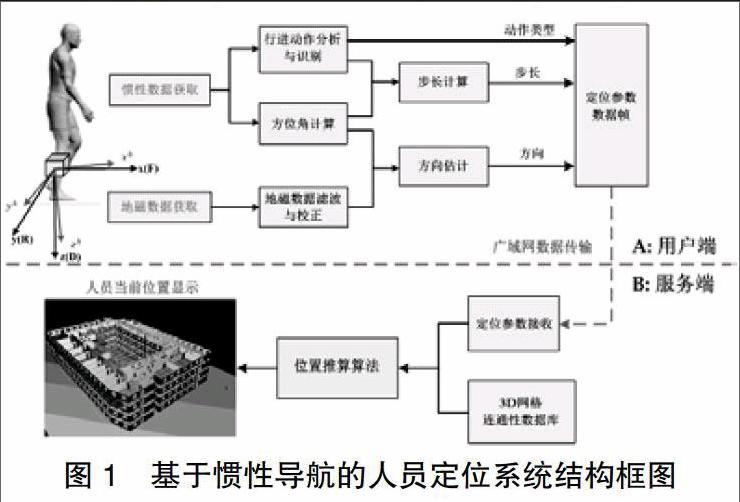
图1给出了基于惯性导航的人员定位系统结构框图。系统分两部分:用户端和服务端。
用户端的两个组成部分包括数据采集和预处理。由于IMU中集成了惯性传感元件和地磁计,将前期设计开发的数据采集单元固定在人员的身体上,与人体捷联。例如将采集单元固定在人员的腰部、胫骨处、脚后跟及脚尖等运动参数明显且周期变化的位置上。数据预处理部分对采集单元采集的慣性传感及磁力数据进行预处理,将结果与相关的模式识别算法相结合,如机器学习等,对人员行进的动作进行识别[4];利用惯性导航理论计算IMU的方位角,与系统可实现的动态电子罗盘相结合,对每个步长的行进方向进行估计;人员的动作类型、步长和方向等位置推算的必要参数实时发送到服务端。
服务端的两个组成部分为位置推算和位置服务。服务端在获取到诸如人员的动作类型、步长和方向等必要参数后,查询当前位置的空间属性,推算人员当前的具体位置。
3 位置推算与定位融合
位置推算过程中累积误差一直参与后续的位置更新过程,且呈现指数级增长。在前期的研究过程中发现,利用零速率修正(ZUPT)技术,在每个位置推算的起始点,将一些为零的中间参数强制设置为零,以切断累计误差在后续位置跟新过程中继续迭代。
若采用ZUPT以后,推算的位置还是与高精度的地图或三维模型的点位存在很大的差异,可利用其它的定位手段,如室外采用GNSS、室内采用一定精度和成本的无线电定位方案,对推算的当前位置进行校正,达到与实际场景长期保持一致,实现定位融合。
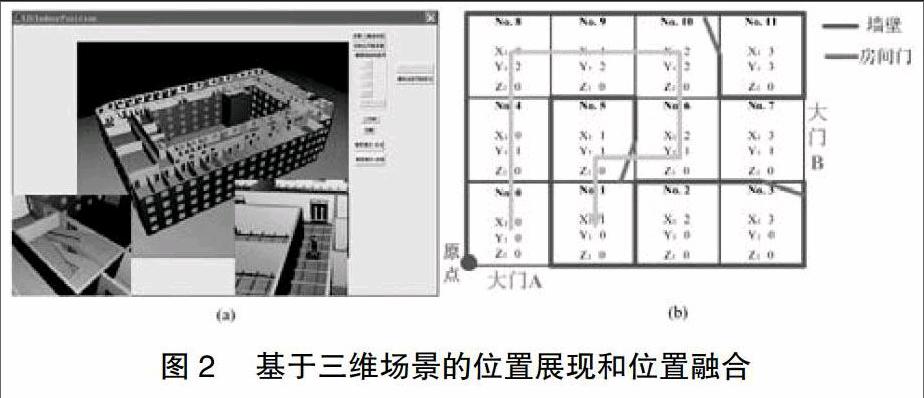
针对室内环境的复杂程度不断提高这一趋势,本文提出了在三维空间内实现室内人员定位的想法,采用类VR场景来实时且动态地呈现人员当前的位置,直观地展现基于惯性导航的室内人员定位系统的效果,如图2所示。同时可利用高精度的三维室内场景对位置推算的定位方法进行位置融合,进一步提高室内定位的精度。
4 结束语
人员定位技术是一个具有挑战和机遇的研究课题,人员定位系统的构建更是涉及方方面面,如传感器/网技术、模拟/数字信号处理、位置融合与滤波等高新技术的交叉应用。本文针对基于惯性导航技术的人员定位系统所涉及的关键问题展开了相关的研究。后续将对IMU本身的温差偏移、测量噪声等因素导致系统的定位误差进行研究。
参考文献:
[1]田增山,朝磊,邢培基等.行人导航系统中航迹推算参数估计方法的研究[J],电子技术应用,2009:84-87.
[2]张天光,王秀萍,王丽霞.捷联惯性导航技术[J].北京:国防工业出版社,2010.
[3]汪少初.基于PDR的定位与跟踪技术研究及系统设计[D].天津大学,2014.
[4]徐光祐,曹媛媛.动作识别与行为理解综述[J].中国图象图形学报,2009(02):189-195.