烟道气体流速流量检测爬壁机器人设计
2017-06-09吴秋龙
吴秋龙
摘 要:本文首先就目前热电厂烟道气体流速流量的检测方法进行分析,然后对应用智能机器人替代人工进行烟道检测在理论上进行可行性说明,进而设计出烟道气体流速流量检测爬壁机器人总体方案设计,并对机器人工作流程进行说明,拓展了爬壁机器人应用领域。
关键词:热电厂;烟道检测;爬壁机器人
目前环保部门对热电厂烟道气体流速流量进行例行检测时,采用工人手持皮托管(特定形状长而细的钢管,一种烟道检测工具),将其从烟道外壁通过检测孔插入到烟道内部进行检测的方法。应用该方法时,存在以下缺点:1、需要事先搭建高层脚手架及操作台,检测完成后需拆除高层脚手架及操作台;2、烟道外壁检测孔附近环境恶劣,对操作人员身体会造成一定伤害;3、人员手持皮托管时间长,劳动强度大;4、无法克服生理颤抖导致地测量参数不稳定;5、高空作业危险系数高。目前我国热电厂分布多而广,各地环保监测站在利用此方法进行例行烟道检测中效率非常低,同时热电厂需要在烟道检测时抽调人手配合环保部门低效而频繁的检查,因此积极性不高。由此导致的诸如检测孔漏检、少检、检测数据弄虚作假等检测问题时常出现,导致我国在建设环保型国家的道路上频频受阻。
一、我国爬壁机器人研制现状
随着近年来科学技术的飞速发展,特别是机器人技术的日渐普及,机器人已深入到国民生产的各行各业之中,代替工人扮演着至关重要的角色。爬壁机器人是机器人领域的一个重要分支,它把地面移动机器人技术与吸附技术有机结合起来,可在垂直壁面上附着爬行,并能携带工具完成一定的作业任务,大大扩展了机器人的应用范围。目前,爬壁机器人主要应用于核工业、石化工业、造船业、消防部门及侦查活动等,如对高楼外壁面进行清洗,对石化企业中的储料罐外壁进行检测和维护,对大面积钢板进行喷漆,对大型船舶船舷进行除锈,以及在高楼事故中进行抢险救灾等。因此,爬壁机器人研制的成功,使应用机器人在垂直烟道外壁进行爬行,并携带相应检测工具进行烟道检测成为可能。
二、烟道气体流速流量检测爬壁机器人总体方案设计
根据产品使用特点,采用磁吸附履带式爬壁机器人作为烟道气流流速流量检测机器人。磁吸附履带式爬壁机器人采用的是双履带永磁吸附结构,在履带一周上安装有数十个永磁吸附块,其中的一部分紧紧地吸附在壁面上,并形成一定的吸附力,通过履带(由链条和永磁块组成)使机器人贴附在壁面上。机器人在壁面上的移动靠履带来完成,移动时,履带的旋转使最后的吸附块在脱离壁面的同时又使上面的一个吸附块吸附于壁面,这样周而复始,就实现了机器人在壁面上的爬行。
由于磁吸附履带式爬壁机器人要附着在导磁介质上,因此需要在烟道外壁固定一块钢板,钢板可以作为烟道的一部分永久固定,用作产品的吸附介质。此外,由于原来检测孔处的法兰已经不适用机器人自动检测的要求,需要对检测孔法兰重新开发,设计一款用于专用的快开法兰。机器人需要从烟道顶部下放,因此需要一辅助系统,同时辅助系统还需要完成对机器人供电线缆、安全绳索和皮托管的收集。
整个系统由爬壁机器人本体、机器人辅助系统、机器人吸附介质(钢板)、快开法兰和控制系统组成。机器人本体包括:皮托管进给装置、机器人骨架、链轮链条、磁铁、防倾覆装置和快开法兰开启装置组成;机器人辅助系统包括:辅助翻转平台、电缆卷筒、硅胶管卷筒和伺服电动葫芦组成;快开法兰是专门设计的一种用来密封检测孔的法兰板,机器人可自動走到检测孔所在位置,将快开法兰自动打开,插入皮托管进行检测,检测完成后快开法兰可以自动闭合,保证检测孔的密封,防止烟气外泄;控制系统包括机器人控制系统、遥控器和辅助系统控制器,操作人员通过遥控器无线控制机器人和辅助系统完成各自的任务,同时可以通过遥控器上的视频接收屏,实时观测机器人所处位置。
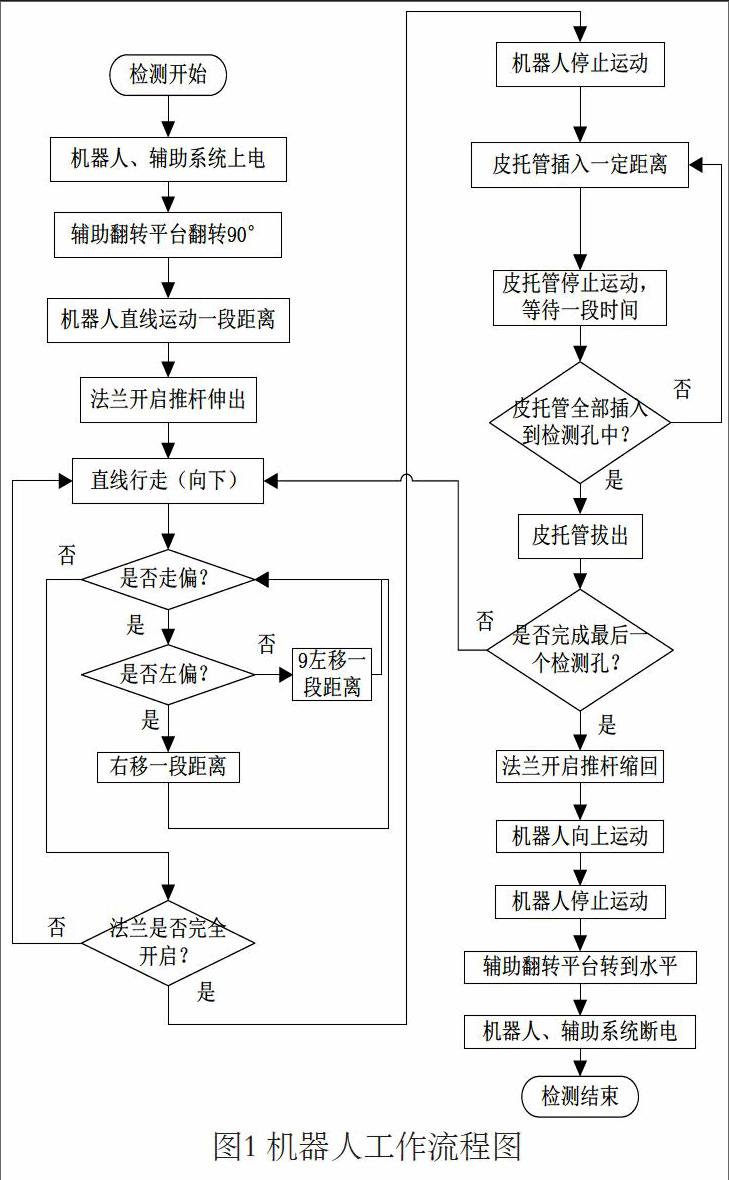
三、应用爬壁机器人进行烟道气体流速流量检测的工作流程
应用爬壁机器人进行烟道气体流速流量检测时,操作者只需手持遥控器,即能控制机器人完成烟道检测任务。工作流程如图1所:
参考文献:
[1]常迎梅,侯国栋.双动力臂爬壁机器人吸附系统设计[J].机械研究与应用,2010,05.