水下机器人无线充电系统电路设计
2017-06-09逯玉明
逯玉明
摘 要 水下机器人充电装置主电路共分4个模块,分别为发送侧电路、接收侧电路、辅助电源及电压电流采样电路。发送侧电路主要包括高频逆变电路和DSP控制电路;接收侧电路包括全桥整流电路和升压电路以及DSP控制电路;辅助电源主要是为传感器及DSP供电;电压电流采样电路主要是为了升压变换器输入电压采样,实现对其输入电压的控制。
关键词 水下机器人;DSP控制电路;电压采样电路
中图分类号 TP242.6 文献标识码 A 文章编号 2095-6363(2017)05-0053-02
1 发送侧主电路设计
本系统的发送侧主要涉及高频逆变和耦合谐振部分,直流电源作为输入经过高频逆变,转变成高频交流电,通入线圈与电容的谐振电路,为达到最大的谐振频率以得到最大的输出交流电压幅值,发送侧逆变的频率和串联谐振网络的自然频率相等为33kHz,逆变器选取为带反并联二极管的MOSFET功率管,以IR2101s为开关管的驱动芯片dsPIC33FJ64GS606为控制单元。
2 接收侧主电路设计
在系统接收侧,电感耦合过来的电压经过全桥整流转变为直流,整流电路采用MOSFET功率管的反并联二极管作为整流管,整流后的直流电作为升压变换器输入,升压变换器升压后给电池充电,因需要控制升压变换器的输入为不同的电压等级,采用PI控制算法实现闭环控制,用dsPIC33FJ64GS606为控制单元,开关频率设定为50kHz,采样频率为10kHz对升压变换器的输入电压进行采样。
3 水下无线功率传输系统实验设计
实验中使用RX-3010D-II型直流电源作为发送侧逆变器的输入和辅助电路的电源,48V铅酸蓄电池作为负载。无线功率传输样机由发送侧逆变器、发送侧谐振网络、发送侧线圈、接收侧线圈、接收侧整流器和匹配变换器(BOOST变换器)各部分组成。
实验具体步骤为:设置系统的输入电压为20V,BOOST变换器的输入电压为17V,分别采取线圈之间的距离为35mm、40mm、45mm、50mm、55mm、60mm、65mm、70mm、75mm、80mm、85mm来测量数据,系统效率计算公式为η=Pout/Pin。
观察示波器,记录水下传输静态传输测试波形如图1所示,发现发送侧电压超前电流,说明发送侧电路呈感性。
4 线圈错位测试
水下机器人在停放充电的时候,并不可能完全与发送线圈对齐,所以针对错位问题做了相关实验研究,研究在负载错位的情况下,对传输功率以及效率的影响。错位有两种形式的错位,一种是平行错位;另一种是倾斜错位,下面针对这两种错位形式做测试分析。
4.1 平行错位测试
平行错位分两种形式,具体如图3所示,即沿着线圈的横向和纵向错位,实验以20mm为步长进行错位,选择了30mm的传输距离进行测试。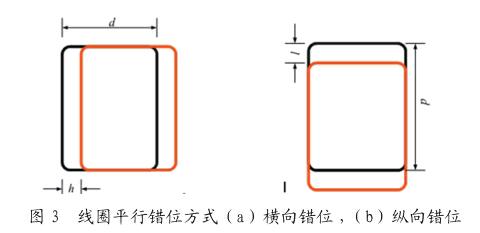
测试结果如图4所示: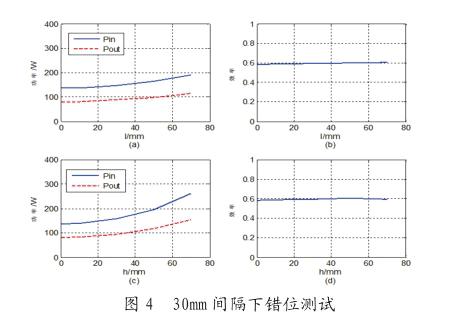
图4中,(a)为功率随横向错位距离变化曲线;(b)为效率随横向错位距离变化曲线;(c)为功率随纵向错位距离变化曲线;(d)为效率随纵向错位距离变化曲线由图可知系统的传输功率随着位移的增大而增大,这和距离增大导致输入输出增大时类似的,但是系统的效率几乎不变。这个结果对于水下无线功率传输可知系统的传输功率随着位移的增大而增大,这和距离增大导致输入输出增大时类似的,但是系统的效率是几乎不变。
从理论角度分析,可以知道,在进行横向错位时,每移一次变化的面积是大于横向错位的,也就是说,漏磁较多,从而导致了效率的降低。这个结果对于水下无线功率传输无疑是有益的。
同样,在测试了50mm传输距离下的错位情况,发现结果和30mm基本一致,排除个别实验数据误差。至此,所以得到的结论是,在系统稳定传输的情况下,一定平行错位对系统的传输效率无太大影响。
当使系统恒定功率输出时,观察效率的变化。实验时,将输出功率控制在200W,结果发现,在进行横向错位时,效率降低的较快,但是系统仍然保持较好的传输效率,总体在60%以上;在进行纵向错位时,效率降低的较慢。从理论角度分析,可以知道,在进行横向错位时,每移一次变化的面积是大于横向错位的,也就是说,漏磁较多,从而导致了效率的降低。
4.2 倾角错位测试
平行错位分两种具体形式如图5所示,倾斜错位时以5°为步长,依据实际情况,测试三组数据。
具体如图6所示。结果发现,测得的结果和平行错位变化趋势基本一致,输入输出功率增大,效率保持几乎不变,由此可以得出,倾角错位是对效率的影响较小的。
图6中左侧为功率倾斜角度变化曲线,右侧为效率变化曲线,当控制输出功率恒定时,效率是有明显的降低的,具体如图7所示。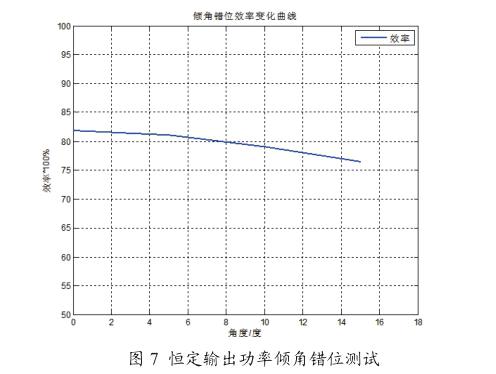
5 结论
综上所述,得到的结论是:在传输的情况下,一定的倾斜和平行错位对系统的传输效率无大影响。当恒定功率输出时,虽然效率降低较为明显,但是仍然保持60%以上的效率。
參考文献
[1]文海兵,胡欲立,张克涵,等.水下航行器非接触式充电电磁耦合器磁场分析[J].计算机测量与控制,2013,21(2):458-460.
[2]唐凡,张克涵,宋保维.水下自主航行器非接触式充电系统频率控制[J].舰船科学技术,2013,35(2):43-46.
[3]王海洋,李德骏,周杰,等.海洋环境下非接触电能传输系统的优化设计[J].传感器与微系统,2011,30(12):112-115.
[4]左文,杨民生,欧阳红林,等.基于DSP的非接触式移动电源技术及应用前景[J].大众用电,2004(8):23-24.
[5]武瑛,严陆光,徐善纲.运动设备无接触供电系统耦合特性的研究[J].电工电能新技术,2005,27(3):5-8.
[6]曲立楠.感应无线能量传输机理的研究[D].哈尔滨:哈尔滨工业大学,2010.
[7]傅文珍,张波,丘东元,等.自谐振线圈耦合式电力无线传输的最大效率分析与设计[J].中国电机工程学报,2009,29(18).