基于EKF的异步电机滑模变结构控制研究
2017-06-07梅卫国
梅卫国
摘要:针对传统异步电机直接转矩控制(DTC)中存在磁链、转矩脉动大且低速时控制精度低等问题,提出了一种新型的滑模控制器取代原先的磁链和转矩滞环调节器,有效改善了动态性能。同时针对异步电机的无速度传感控制的问题,采用了一种基于扩展卡尔曼滤波(EKF)来估算转速和磁链并用于闭环控制,通过对定子磁链与转速的闭环控制改善了定子磁链的估算精度,实现了异步电机的无速度传感控制策略。仿真结果表明,此改进后的系统在一定的速度范围内具有更快的响应速度、抗干扰性能更强、鲁棒性更强。
Abstract: This paper proposed a new type of sliding mode controller to replace the original flux linkage and torque hysteresis of the traditional direct torque control (DTC), which has problems of overshooting and low dynamic performance of outer loop. It improves the dynamic performance effectively. At the same time, the extended Kalman filter (EKF) observer was proposed in this paper for the sensorless control problem of asynchronous motor. The EKF observed the flux linkage and speed used for closed-loop control. The EKF observer provides stability properties for asynchronous motor speed sensorless control algorithmic. From the simulation, it shows that this modified system has faster response speed, improve the performance of the direct torque control of asynchronous motor.
關键词:异步电机;无速度传感器;扩张卡尔曼滤波;滑模控制器;直接转矩控制
Key words: induction motor;sensorless control;extended Kalman filter;sliding mode controller;direct torque control
中图分类号:TP273+.5 文献标识码:A 文章编号:1006-4311(2017)16-0118-04
0 引言
电磁转矩与磁链超调大、逆变器的开关频率不稳定、低速时系统很难保证精确控制等问题导致了传统异步电机直接转矩系统的应用受到很大的约束[1]。在高性能的电机调速系统中,通常需要对磁链和转速的准确而且快速的控制,本文提出了一种新型的滑模控制器(SMC),用于DTC中定子磁链和转矩的控制。与传统方法的PI调节器器相比,不仅保持原有的简单性特征,将进一步提高了异步电机控制系统的动静态性能。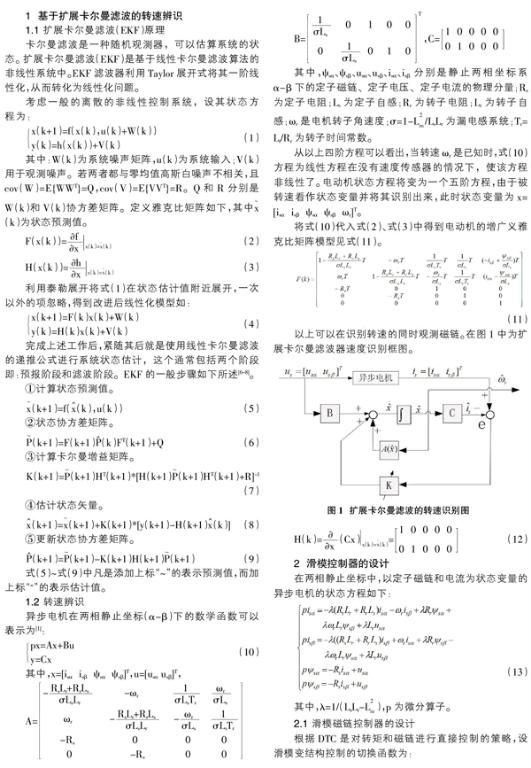
无速度传感器控制技术已广泛地应用在现代电机控制领域。对于感应电机的无速度传感控制系统来说,磁链观测和速度准确估计是决定控制系统的性能的关键。常用的磁链速度观测方法包括锁相环(PLL)、模型参考自适应(MARS)和扩展卡尔曼滤波(EKF)等方法[2-5]。其中,基于EKF控制策略表现出良好的动态性能、较强抗噪声干扰能力以及收敛速度快,获得广泛关注[6-8]。在[9]中,采用基于MARS的速度估算方法,其使用PI控制器进行自适应控制,但是带来了新的问题就是系统的稳定性。文献[10]首先提出将电机参数和状态估计结合起来,利用卡尔曼滤波技术进行估计,但是没有考虑到负载转矩的影响。
本文中在传统的异步电机DTC控制系统中设计了转矩与磁链滑模控制器替代了在传统DTC中的滞环调节器,将查询表变换成空间电压矢量调制(SVPWM),实现对传统DTC算法的优化。鉴于EKF算法对噪声体现出很好的抑制能力,因此本文采用EKF来进行系统状态估计,建立异步电机无速度传感器的直接转矩控制系统。仿真结构验证了采用EKF方法是合理的,同时系统的调速性能也大为提高。
1 基于扩展卡尔曼滤波的转速辨识
1.1 扩展卡尔曼滤波(EKF)原理
卡尔曼滤波是一种随机观测器,可以估算系统的状态。扩展卡尔曼滤波(EKF)是基于线性卡尔曼滤波算法的非线性系统中。EKF滤波器利用Taylor展开式将其一阶线性化,从而转化为线性化问题。
图3是工况为负载5N·m时启动系统到达稳定状态,电磁转矩的波形图。转矩脉动曲线如图3所示,转矩响应脉动比较大,稳态时转矩的波动范围达到±3N·m。
图4示出改进后在滑模变结构控制下电机带负载4工况下,转矩响应曲线的变化情况。从图中可以看出转矩脉动很小,开关切换速率较为平稳,滑模变结构控制大大降低了转矩脉动。图5是在给定转速为100rad/s、电机负载为4N·m、定子磁链给定值1Wb时,电机的定子磁链波形图,从图中可以看出定子磁链的脉动较大。
从图6所示定子磁链波形图依旧可以看出,基于滑模变结构的DTC不仅降低了转矩脉动的同时也显著降低了磁链脉动。
从图7所示实际转速和Kalman估算的速度。滑模控制器的调节加快了进入稳态的时间,估计转速与实际转速曲线很快就重合了,误差几乎为零。这是因为EKF算法是一种递推运行的算法,初始值是随机给定的,所以一开始有估算误差,但是随着算法的逐步递推,误差逐渐变小,并最终可以完全跟踪实际速度,实现无偏差的速度估计。
由图8可以可以看出,当转速在不断变化时,实际转速很快响应了系统的变化,这表明基于滑模变结构的DTC依旧保留了传统DTC的快速响应的特性,而且转速变化也较为平稳,没有较大波动,系统在外部扰动表现出很强的鲁棒性;估算转速也能完全跟踪实际速度,实现了EKF的无偏差估算。
4 结论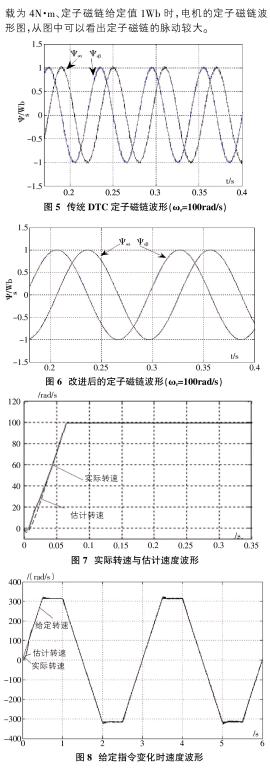
本文设计了基于EKF的异步电机滑模变结构调速系统。首先,将滑模变结构控制和DTC策略相结合提出了新型基于滑模直接转矩控制策略,定子磁链与转矩的滑模变结构控制器设计出来,有效地减小了定子磁链和转矩的脉动,这说明系统对参数变化和外部噪声体表现了较强的鲁棒性。其次,从仿真结果可以看出,通过检测定子侧的电压与电流,EKF滤波观测器可以精确的估算出电机的转速以及定子磁链,实现异步电机直接转矩的无速度传感控制。
参考文献:
[1]阮毅,陈伯时.电力拖动自动控制系统:运动控制系统[M].四版.北京:机械工业出版社,2011:115-199.
[2]HOLTZ J. Sensorless control of induction motor [J].Proceeding of the IEEE, 2002,90(18):1359-1394.
[3]HOLTZ J. Speed estimation and sensorless control of AC drives [C]. Proceedings of International Conference on Industrial Electronics, Control and Instrumentation, Nov 15-19, 1993, Maui, USA.1993, 2:649-654.
[4]HOLTZJ. Sensorless control of induction motor-performence and limitations [C].Proceedings of the 2000 IEEE International Symposium on Industrial Electronics, Dec 4-8, 2000, Cholula, Mexico. 2000, 1:12-20.
[5]MANES C, PARASILITI F, TURSINI M.A comparative study of rotor flux estimation in induction motors with a nonlinear observer and the extended Kalman filter [C]. 20th International Conference on Industrial Electronics, Control and Instumentation , Sep 5-9, 1994,Bologna,Italy. 1994, 3:2149-2154.
[6]王琛琛,李永東.基于EKF的异步电机无速度传感器矢量控制方法[J].清华大学学报(自然科学版),2008,48(10):1545-1548.
[7]李剑飞,尹泉,万淑芸.基于扩展卡尔曼滤波器的异步电机转速辨识[J].电工技术学报,2002,17(5):40-44.
[8]BARUT M, BOGOSYAN S,GOKASAN M. Speed sensorless estimation for induction motor using Extended Ka-lman Filters [J]. IEEE Transaction on Industrial Electron-ics, 2007, 54(1):272-280.
[9]孟飞锋,南余荣,陈庆学.基于MRAS的无速度传感器异步电机控制[J].机电工程,2009,26(9).
[10]Silverio B, Roberto O,Mauro Z. Sensorless full-digital PMSM drive with EKF estimation of speed and position [J]. IEEE Transactions on Industrial Electronics,1999, 46(1):141-191.
