基于模糊模型切换系统的稳定性研究
2017-06-06陈秀琴熊建栋
赵 娜,陈秀琴,熊建栋
(1.信阳职业技术学院,河南 信阳 464000;2.河南师范大学,河南 新乡 453000)
基于模糊模型切换系统的稳定性研究
赵 娜1,陈秀琴1,熊建栋2
(1.信阳职业技术学院,河南 信阳 464000;2.河南师范大学,河南 新乡 453000)
目的 在切换系统的运行过程中,时常会受到外界因素的干扰,从而导致系统切换过程中出现各种问题和纰漏,不能最大程度保障系统运行的稳定和高效。通过仿真研究进一步探讨基于模糊模型的切换系统是否稳定。方法 使用模糊模型的方法对切换系统的稳定性进行各个层次的调查和研究。首先把切换系统转换为T-S模糊模型,因为T-S模糊模型具有非线性性;结合变量—梯度法的使用,对该系统在原点的小领域里面能够保持稳定的环境和条件进行研究实验,并且获得模糊切换策略。结果 对于给定的模糊模型的线性切换系统,通过适当的切换策略使得系统在原点的小邻域内可以保持稳定状态。结论 通过系统仿真,证实了模型切换系统不仅操作简便,而且结果较为准确,能够最大程度上保障系统运行的稳定和高效,并使之前已经决定好的切换策略按照切换系统精确按时执行。
T-S模糊模型;切换系统;切换策略;稳定
0 引 言
控制系统有很多的弊端和不足,如非线性、不确定性、时间延迟性以及易受干扰性,这些因素都给精确完整地建立控制对象数学模型带来了诸多的困难,增加了复杂控制系统设计研究的难度,也使得传统的控制理论和控制方法无法有效完成这些研究设计。但是,如果在这个过程中利用模糊控制理论,对于问题的处理和解决就容易多了,因为利用模糊理论不需要十分精确的数据,只需要专家提供一些大概的、不详尽的数据信息和相关的理论知识就可以进行研究了。正因为模糊理论的便捷性,成为当今数学领域的学者十分关注的热门话题。
20世纪60年代,美国一位十分有威望的控制理论专家L.A.Zadeh教授首次提出了“模糊集合论”概念,并发表论文对这一理论进行详尽的阐述和解答;20世纪70年代前后,英国一位当时十分有名的学者E.H.Mamdani,首次在工业控制过程中使用模糊理论,成功生产出第一台模糊控制器,并用这种技术成功控制蒸汽机和锅炉。由此,在实际生活和工程领域中应用模糊控制理论拉开了序幕,这也是模糊控制理论的初期发展。随着人们不断地在实际工程中频繁使用模糊理论,一些模糊系统学术会议相继召开[1],并成立了国际研究机构,模糊控制理论的应用得到了快速发展。
模糊控制是一种仿照人类的思维方式,通过控制方法的模拟来表达充满人性的经验和知识。模糊控制是智能控制的主要研究领域之一,它可以建立一个投入产出模型,该模型适用于计算机处理。当模糊控制作为一种信息技术,它被认为是有一定规则的专家系统;作为控制技术中使用时模糊控制,它被认为是域控制器装置的一个共同的非线性特性。控制是指知识可以与模糊的认识、工厂及控制器的概念设计建立概念的所谓模糊的表示,甚至可以这样认为,任何一项需要确定结果的工作都可以用模糊语言模糊控制算法来完成。
1 预备知识
线性切换系统[2]是文章主要研究的内容,表现为:
X=Aix,i∈M={1,2,…,N}
(1)
在(1)式里,状态向量用x来表示, 而且x∈Rn, 系统状态矩阵Ai∈Rnxn, 子系统的个数由N来表示。
τ0是任意给定的初始时间,x0是任意给定的初始值,x0=x(τ0), 因此切换序列可以这样进行定义:
S=x0(i0,τ0)(i1,τ1)(i2,τ2)…(ik,τk)
(2)
在(2)式里,ik∈M,τk是单调递增的切换时间序列, (ik,τk)所代表的含义是,如果符合τk≤t<τk+1,系统的状态轨迹就会沿着x(t)=Aik(x(t))展开,系统的轨迹就可以由切换序列(即切换律)和式(1)充分表现出来。
各个子系统和切换规律共同组成了切换系统,但是切换系统与别的系统却不尽相同,而且十分复杂,仅仅凭借各个子系统性质的简单叠加绝不会得到切换系统。2个全局指数稳定的子系统按照某切换序列进行切换,结果具有很大的变数,稳定性不能得到很好的保证,但如果对于2个不稳定的子系统来讲,在其经过切换后就可以越来越稳定。因此,对于系统(1)而言切换序列是极其关键的组成部分。
在切换系统的运行过程中,时常会受到外界因素的干扰,影响结果,导致时间延迟,从而使得之前已经决定好的切换策略无法由切换系统精确按时执行,导致在系统的切换过程中出现各种问题和纰漏,不能最大程度上保障系统运行的稳定和高效。
为了保证结果的准确性,可以先假设系统(1)只有2个子系统,然后再从这方面入手进行研究。
2 模糊切换下的现行切换系统的稳定性
2.1 切换系统的T-S模糊模型
对于系统(1)的T-S模糊模型,可以将其用公示表达为:
(3)
在(2)式里,Ω1和Ω2都是R2上面的模糊集, 因为系统(1)的2个子系统要不停地进行切换, 所以Ω1和Ω2的隶属度函数[3]可以设为
(4)
式(4)中μ1和μ2都是二维隶属度函数,a1和a2都是等待确定数值的常数, 也可以用其他函数来对Ω1和Ω2的隶属度函数进行赋值,例如高斯隶属度函数等,利用最常用的max-min法来进行推理,然后再进行加权平均。系统(3)的加权总输出如下所示:
(5)
可以将式(5)里的正弦函数进行展开,通过Tayolr公式(范围是原点的小领域)可以得到
sin(x1+a1)≈sina1+cosa1·x1
sin(x2+a2)≈sina2+cosa2·x2,

可以简单记为:
x=f(x)
(6)
系统(6)是一个非线性系统,下面模糊模型的稳定性将利用克拉索夫斯基定理进行研究,就可以对μ1的参数a1和μ2的参数a2进行分别确定。
2.2 切换系统稳定性的判定
要想知道一个非线性系统是否具有稳定性,可以利用克拉索夫斯基定理来进行判断。因此利用克拉索夫斯基定理来进行研究判断系统(6)是否具有稳定性以及稳定的情况。

+(x1cosa1·A1+x2cosa2·A2+x1cosa1·A1T+x2cosa2·A2T)


定理1 对系统(3)进行考虑, 同时为模糊集Ω1和Ω2选取隶属度函数, 其形式如式(4), 如果存在常数a1和a2, 使得∀x∈(0,δ), 其中δ>0是常数, 均满足
[(1+sina1)+2x1cosa1]A1+[(1+sina2)+2x2cosa2]A2<0
可以得出这样的结论:系统(3)在x=0上某一部分的小邻域里渐进稳定。
3 仿真算例
设线性切换系统的公式为:
x=Aix, i=1,2
(7)
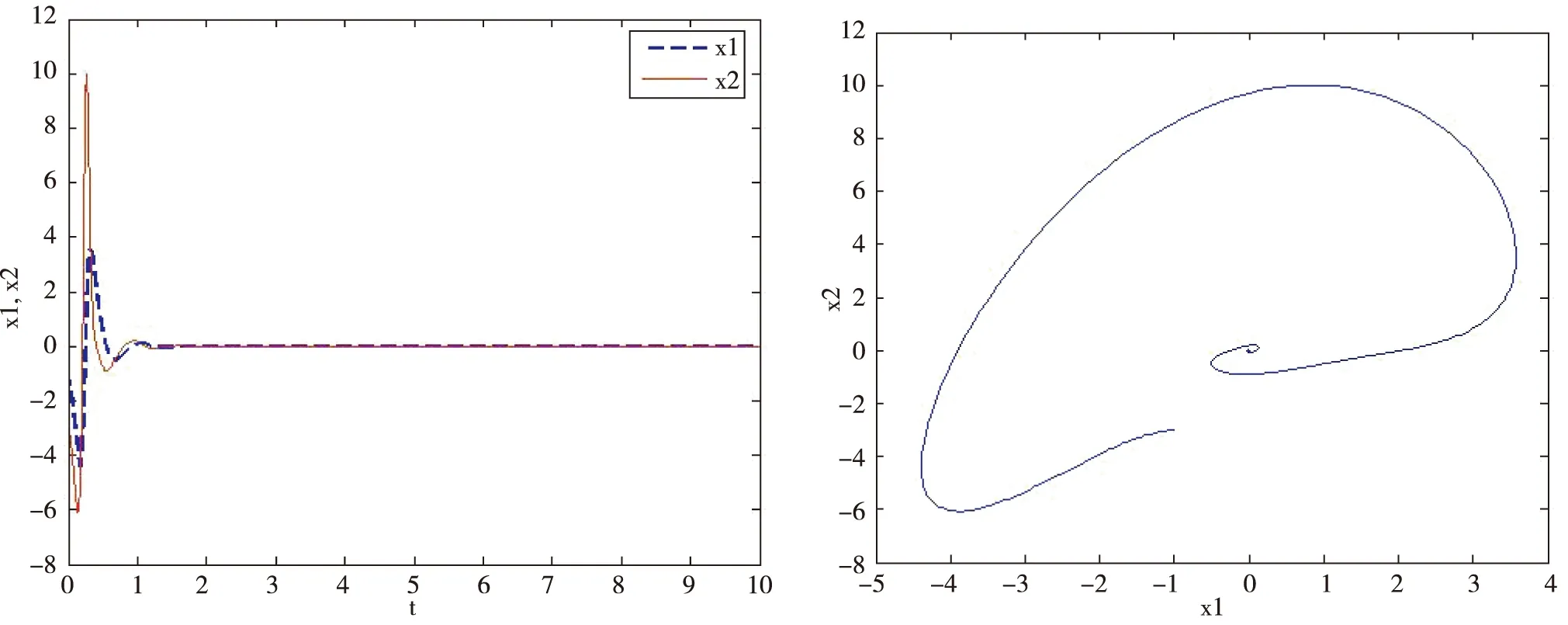
图1 系统响应曲线 图2 系统状态轨迹
4 结 论
目前,基于模糊模型切换系统稳定性的研究已经非常广泛[4,5],但仍有很多问题没有得到解决,主要有几个方面:
(1)基于TS模糊系统的可靠控制问题
综合运用切换控制器思想和可靠的控制理论,对于不能使用单一控制系统对单个控制器进行快速渐进稳定的控制问题,通过设计可靠的控制器,可使“可控制问题不能利用传统控制方法得到有效解决”这一现象彻底消失。
(2)基于网络的模糊系统的混杂控制问题
随着网络信息技术的飞速发展,基于网络的模糊系统成为了一类新的控制系统,它具有一切作为网络所具有的特性,如延迟、分组丢失,而且还具有模糊系统的特点,所以在研究过程中会遇到很多的困难,必须要通过更多的研究手段来加以解决。
(3)模糊系统混杂控制的应用问题
随着计算机控制技术和网络技术的不断进步,模糊系统混合控制的应用越来越广泛,同时人们对混合模糊控制系统的研发也提出了更高的需求,这样的良性循环将大力促进社会的进步,给社会的发展带来可观的经济效益。
[1]孙增圻.基于模糊状态模型的连续系统控制器设计和稳定性分析[A].中国自动化学会智能自动化专业委员会.中国智能自动化学术会议论文集(上)[C].呼和浩特:1996年中国智能自动化学术会议,1996:414-416.
[2]景丽,高立群,刘罗曼.基于模糊方法的切换系统稳定性研究[J].自动化技术与应用,2007,26(10):1-3.
[3]景丽,高立群.基于模糊切换策略的线性切换系统的稳定性[J].计算技术与自动化,2009,28(01):11-13.
[4]姜建妹.基于T-S模型的时滞切换模糊系统稳定性分析与鲁棒控制[D].扬州:扬州大学,2010.
[5]陶冠男.基于T-S模糊模型的不确定切换模糊系统鲁棒控制[D].沈阳:沈阳大学,2013.
[责任编辑:关金玉 英文编辑:刘彦哲]
Stability of Switched Systems Based on Fuzzy Model
ZHAO Na1,CHEN Xiu-qin1,XIONG Jian-dong2
(1.Xinyang Vocational and Technical College,Xinyang,Henan 464000,China;2.Henan Normal University,Xinxiang,Henan 453000,China)
Objective In the process of switched system operation,the system is often interfered with external factors,resulting in various problems and flaws in the system switching and failing to maximize stability and efficiency of the system.The simulation study further explored the stability of the switch system based on fuzzy model.Methods By using the method of fuzzy model,all levels of the stability of the switched systems were studied.Before the study,the switch system was converted into a T-S fuzzy model,for the T-S fuzzy module had nonlinearity;in combination with the use of variable gradient method,it determined the environment and condition in which the system at the origin of small area could keep stable,and obtained the fuzzy switching strategy.Results For a given fuzzy model of linear switched system,the proper switching strategy enabled the system to remain stable in a small neighborhood of the origin.Conclusion The system simulation confirms that the model switching system can be operated easily and accurately;it ensures the stability and efficiency of operation system to the largest extent;and it leads the planned switched strategy to be precisely implemented according to the switched system.
T-S fuzzy model;switched system;switched strategy;stability
河南师范大学博士启动基金项目(qd13038);河南省科技攻关项目(162102210265)
赵娜(1981-),女,河南驻马店人,信阳职业技术学院讲师,硕士,研究方向:复杂系统。
TP 273
A
10.3969/j.issn.1673-1492.2017.03.003
来稿日期:2016-07-01