特高压输电线路巡检无人机安全技术探讨
2017-06-05吕勃翰
孙 阳,李 鲁,王 蔚,吕勃翰
(1.国网山东省电力公司检修公司,济南 250118;2.华北电力大学电气与电力工程学院,北京 102206)
特高压输电线路巡检无人机安全技术探讨
孙 阳1,李 鲁1,王 蔚1,吕勃翰2
(1.国网山东省电力公司检修公司,济南 250118;2.华北电力大学电气与电力工程学院,北京 102206)
近年来特高压输电工程的逐步建成,对无人机巡检作业提出了更高的安全要求。分析特高压线路无人机巡检作业中的安全隐患,从无人机系统电磁干扰防护、多余度飞行控制系统、基于毫米波雷达的无人机避障技术三方面出发,对电力巡检无人机安全技术的原理、构思及实现方式进行讨论。
电磁干扰防护;多余度飞控系统;避障技术
0 引言
随着我国经济高速发展及能源结构转型,以特高压为重点的跨区域输电工程建设全面展开。这是保障国家能源安全、提高能源效率、服务清洁能源发展、促进生态文明建设的重要选择,可有效提升我国长距离、大容量能源转移的能力,对转变经济发展方式、调整能源结构将产生深远影响。
输电线路巡检是及时发现并消除隐患确保线路安全、可靠运行的必要基础性工作。在长期的输电线路运行维护工作中,总结出多种巡检方法。除传统人工巡检外,还积极将新技术应用于线路巡检,其中无人机巡检是近年来大范围推广应用的一项技术,在提高巡检质量及效率方面取得显著成效。
然而相较高压、超高压输电线路,特高压输电线路的结构及运行参数更高,同时也对无人机巡检作业提出了更高的安全要求。电力巡检多旋翼无人机的作业区域主要为环境复杂的低空领域,存在交叉跨越线路、道路桥梁、建筑物及树木等有形障碍,同时会受到线路产生的强电磁场、通信基站无线电信号等无形干扰[1]。若不能处理好无人机与输电线路及周边环境的关系,轻则无人机故障坠毁,重则造成人身及电网安全事故,导致大规模停电。因此,研究特高压输电线路多旋翼无人机巡检安全技术具有重要意义。
1 巡检安全隐患分析
目前多旋翼无人机巡检作业的主要方式为在线路附近空中悬停,通过其搭载的照相机对巡检目标拍照。为保证巡检质量,无人机作业时需与带电导线保持较近的距离。因此,无人机巡检作业中面临的安全隐患主要有电磁场干扰和误撞障碍物。特高压输电线路在其周围产生强电磁场,干扰无人机飞控、测量模块等电路元件,甚至致其损坏,导致无人机失控。无人机作业时与线路保持近距离,且由于特高压线路为电网中结构高度最高的线路,在线路通道中存在大量与其他线路交叉跨越的情况,大幅增加无人机碰撞铁塔或导地线的风险。
针对电磁场干扰,主要应对手段为电磁干扰防护和多余度飞控系统。电磁干扰防护是指无人机加装电磁屏蔽外壳及对内部电路进行优化处理,抑制输电线路电磁场对内部电路元件的干扰,有效降低外部因素影响。多余度飞控系统,指多套飞控系统同时运作、互为备用,降低了飞控系统受电磁干扰误动作的概率,有效提高自身抗干扰能力。
针对误撞障碍物,主要应对手段为雷达测距避障及视觉定位避障技术,即通过雷达测距或视觉定位等手段确定无人机周围障碍物位置及相对速度等信息并反馈给飞控系统,由其做出判断并控制无人机实现避障[2]。
2 无人机系统电磁干扰防护技术
无人机电源及信号回路如图1所示,电磁干扰主要由3个要素造成,即干扰源、干扰途径及被干扰设备。通过对电力巡检无人机的工作环境分析可知,特高压输电线路的导线周围分布着强电磁场,其发射出的强电磁波为主要干扰源。无人机系统中易受干扰的电子设备主要有飞行控制系统、各类测量模块(IMU、GPS定位仪、气压计、磁罗盘等)及信号接收机等,受电磁干扰后将对飞行安全造成极大隐患,因此主要考虑对这些设备的电磁防护。
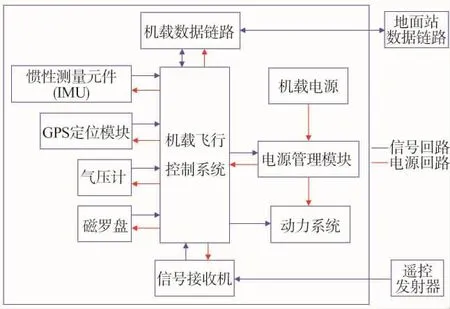
图1 无人机电源及信号回路
电力巡检无人机系统受到干扰的途径有辐射耦合和传导耦合两种:辐射耦合是指电磁波通过无人机机体及设备外壳上的通风散热窗、线路接口及连接处缝隙等进入机舱内部,或机载电子设备相互间的电磁耦合,对电子设备及线路造成干扰;传导耦合是指电磁波在机载天线或外部线路等其他设备中产生感应电流并沿电源及信号回路传导,导致关键设备发生逻辑错误甚至造成硬件损伤。根据上述干扰途径,在电力巡检无人机上主要采取屏蔽和滤波方式进行防护。
2.1 屏蔽
电磁屏蔽是指通过切断辐射耦合途径抑制电磁场对关键设备的干扰,实质是将关键设备用屏蔽体包围起来,使耦合电磁波通过反射和吸收被衰减。屏蔽干扰源是最直接的防护方式,但实际设计中无法做到完全屏蔽。通过分析常见的电力巡检无人机,主要从3个方面进行电磁屏蔽防护。
1)机身面板、设备外壳等处的接缝、孔洞对于接缝最理想的方式是将其焊接起来,但为保证无人机设备的可拆装性,这种做法是不现实的。因此考虑在接缝处使用屏蔽垫,常用的屏蔽垫有:金属丝网垫;导电布垫;硬度较低易于塑性变形的软金属(铜,铝等),如图2所示。

图2 电磁屏蔽垫
设备出于散热、接线的需要在外壳上留有孔洞,对于这些部位采取的主要措施为将原有面板或外壳改为穿孔金属板,即在金属板上打出供线路通过或通风散热用的孔阵,以减少外壳上的孔洞面积[3]。
2)电子设备及线路加装屏蔽层。电子设备及线路为电磁辐射耦合的主要对象,对其采取的屏蔽措施主要为加装屏蔽层:对于飞行控制系统、测量元件等电子设备,可采用锡箔纸整体包覆的方式;信号回路可采用双屏蔽的双绞线,即不同的模拟信号线应该独立走线,有各自的屏蔽层,且走线应尽量短,以减少线间的耦合;电源回路可采用屏蔽线,屏蔽层的电导至少为每相导线芯电导的1/10,且屏蔽层应可靠接地。如图3所示。

图3 电子设备及线路屏蔽层
3)系统布局。通过改善系统布局可有效降低关键设备受到的电磁干扰,主要遵循以下原则。
关键设备尽量远离机身干扰源。飞行控制系统、测量元件是飞行安全的核心,应使其远离电调、电机线路等大电流设备及接缝、孔洞等外界干扰源,也可对机体内空间进行分割隔离,降低设备间的电磁干扰。机载电调不同距离处场强对比如图4所示。

图4 机载电调不同距离处场强对比
合理布线改善电磁干扰。大电流线路应独立于其他线路走线,同时应避免与其他电线长距离平行走线,以减少输出电压快速变化而产生的电磁干扰。电源回路与信号回路交叉时,应使其按 90°角交叉,同时必须用合适的扎带固定到安装板上。当有线路经过孔缝时,应尽量使线路沿孔缝方向或平行孔缝布线,避免跨越孔缝,以免孔缝在线路电场作用下发生天线效应,向外辐射干扰对周围设备产生电磁干扰。
2.2 滤波
滤波是指将传导耦合中的电磁干扰能量滤除,并维持线路中工作电平的技术。针对从天线部分耦合进来的能量,可以在天线等外部接口处使用带通滤波器,并对接收信号进行滤波匹配;对于从外部线路耦合进来的能量,可采用电源滤波器。常用的电磁干扰滤波器为铁氧体磁环滤波器。
铁氧体磁环可视为一个阻值随频率变化的电阻。根据电磁波频率特点可以选用镍锌铁氧体或锰锌铁氧体,前者的高频特性优于后者。铁氧体的磁导率越高,其低频时的阻抗越大,高频时的阻抗越小。所以,在抑制高频干扰时,宜选用镍锌铁氧体;反之则用锰锌铁氧体。也可在同一束线路上同时套上锰锌和镍锌铁氧体,这样可以抑制的干扰频段较宽。磁环的内外径差值越大、纵向高度越大,其阻抗也就越大,但磁环内径一定要紧包线路,避免漏磁。磁环的安装位置应尽量靠近干扰源或接口处。PWM信号线加装铁氧体磁环如图5所示。

图5 PWM信号线加装铁氧体磁环
3 多余度无人机飞行控制系统
无人机飞行控制系统的稳定性及可靠性是决定无人机飞行安全的关键因素。多余度飞行控制系统即多套系统同时运转、互为备用,大幅降低单一系统故障时导致飞行事故的概率。以双余度为例介绍飞控系统的系统构架及工作原理,双余度飞控系统架构如图6所示。

图6 双余度飞控系统架构
双余度飞控系统由两套相互独立的传感器、飞控计算机及一个表决模块组成,两套飞行数据传感器及飞控系统采用双余度热备份模式[4]。传感器A、传感器B同时工作,采集决定飞行控制的同源数据(包含GPS坐标、加速度、姿态角、气压高度及磁航向等),并输出到各飞控计算机的数据接口。飞控数据接口各通道先后接收到来自传感器A、B的输入数据后,在CPU中进行分析对比,经过控制律程序选出合适的数据,作为依据运算得到输出给各控制终端的输出数据。两套飞控的输出数据汇入表决模块,通过控制律程序最终决定由其中一套飞控系统的输出值作为整套系统的最终输出。双余度飞控系统的工作流程如图7所示。

图7 双余度飞控系统的工作流程
目前,国内无人机多余度飞控系统主要采用二余度及三余度,如图8所示,少数国外无人机也有采用更高余度的设计方案,但飞控系统的余度设计并非越高越好。随着余度数增多,相应的检测、判断和转换模块也增多,这将一定程度降低系统可靠性。故飞控系统应确保多余度设计所提高的可靠性及安全性不会被其所增加配套装置的重量、体积及故障率所抵消。

图8 常见多余度飞控系统
4 基于毫米波雷达测距的无人机避障技术
电力巡检无人机作业环境复杂,为避免无人机飞行中碰撞障碍物或线路,确保飞行安全,必须要考虑无人机自动检测障碍物并避让的技术。目前,电力巡检无人机避障技术主要有两个发展方向,分别是基于雷达测距及基于视觉定位的无人机避障技术。
无论是基于雷达测距,是基于视觉定位的避障技术,都是通过机载雷达或视觉定位装置对无人机周围进行扫描探测,得到无人机与障碍物的相对位置及速度等数据,并发送到飞控系统,经避障程序处理得到避障解决方案,并控制无人机做出响应。目前,视觉定位技术应用刚起步,尚不成熟,且对于输电线路的导地线等纤细物体,不能有效识别;激光雷达避障技术在各领域的大型无人机上已取得较为成熟的应用效果,但由于激光雷达重量、体积大,难以应用于电力巡检的中小型无人机上。针对这一问题,采用基于毫米波雷达测距的无人机避障技术。
毫米波雷达在电力巡检无人机避障测距应用中的优势主要体现在以下方面[5]。户
1)雷达采用一路发射天线和两路接收天线,收发天线分离设计使得雷达收发链路具有高隔离度,提高了雷达目标探测的动态范围,有效探测距离可达50 m。
2)多接收天线的设计使得雷达获得目标回波细微的相位差,让雷达具备精准的测角能力,探测精度达±0.1 m,能有效识别导地线。
3)雷达天线在方位面设计为宽波束,在俯仰面设计为窄波束,并且采用泰勒算法对方位面进行低副瓣综合。这样的设计使雷达在方位面上具有140°的宽视角,同时低副瓣使雷达不易受地面目标的干扰,显著提高雷达的探测性能。
4)高精度数字锁相电路负责射频基带的调制与解调。高性能数字信号处理芯片负责完成目标检测与跟踪,刷新频率达50 Hz,能在 20 ms内准确地对目标进行定位,并通过CAN接口输出数据。
基于以上优势,高集成度毫米波雷达尤其适于作为电力巡检中小型无人机避障系统的感测装置,其毫米波宽带线性调频技术能实现对导地线等纤细目标的探测,通过数据转发为飞控系统做出避障策略提供依据,避免无人机误撞输电线路或其他障碍物的事故发生。
5 结语
电力巡检无人机作业环境中的强电磁场对机载电子设备造成电磁干扰。通过在设备外壳的接缝、孔洞处加装电磁屏蔽垫,电子设备及线路加装屏蔽层,合理改善系统布局及在线路上加装滤波器等方式,有效抑制电磁干扰对关键设备的影响,提高巡检作业安全性。
通过升级多余度飞控系统,大大降低了单一飞控系统出现故障导致无人机事故的概率,提高了无人机巡检作业的稳定性及可靠性。
采用全新的高集成度毫米波雷达为解决电力巡检无人机测距避障技术难题的提供了一种十分高效、优质的新方案,使无人机误撞障碍物的安全隐患得到消除,对后续的研究和装备极具参考价值。
[1]李勇.无人飞行器在特高压交流输电线路巡视中的应用模式研究[D].北京:华北电力大学,2014.
[2]郑天茹,王滨海,刘俍,等.电力巡线无人直升机障碍规避系统[J].山东电力技术,2012,39(1):14-17.
[3]卢育中.小型飞行器复杂电磁环境下的电磁干扰耦合及防护研究[D].西安:西安电子科技大学,2013.
[4]柳孔明,黄俊.无人机多余度航空电子系统研究与应用[J].计算机测量与控制,2012,20(5):1 340-1 343.
[5]喻江波.毫米波雷达对电力线检测的关键技术研究[D].南京:南京理工大学,2015.
Discussion on the Safety Engineering of UAV in UHV Transmission Line Routing Inspection
SUN Yang1,LI Lu1,WANG Wei1,LV Bohan2
(1.State Grid Shandong Electric Power Maintenance Company,Jinan 250118,China;2.School of Electric and Electronic Engineering,North China Electric Power University,Beijing 102206,China)
In recent years,the construction of UHV transmission project has put forward higher security requirements for UAV routing inspection.The potential safety hazard in UHV transmission line routing inspection by UAV is analyzed.The theory,design and implementation of safety engineering of UAV routing inspection are discussed from three aspects of protection against EMI,redundancy flight control system and the obstacle avoiding technology based on millimeter-wave radar.
protection against EMI;redundancy flight control system;obstacle avoiding technology
TM755
A
1007-9904(2017)02-0015-05
2016-10-26
孙 阳(1991),男,从事输电线路运维及无人机巡检工作。