支持向量机纯电动客车驾驶意图识别
2017-06-05谭盛彬
李 慧, 谭盛彬, 张 硕
(长春工业大学 电气与电子工程学院, 吉林 长春 130012)
支持向量机纯电动客车驾驶意图识别
李 慧, 谭盛彬, 张 硕
(长春工业大学 电气与电子工程学院, 吉林 长春 130012)
以支持向量机为模型判断驾驶意图,通过对支持向量机进行训练,以加速踏板开度、加速踏板位移加速度为输入,利用网格优化算法得到了驾驶意图判断模型。仿真结果验证预测精度可达到99%。
驾驶意图; 支持向量机; 纯电动客车
0 引 言
纯电动汽车与传统汽车[1]相比具有零排放、噪声小、能源利用率高的特点,是未来汽车行业发展方向。纯电动汽车的续驶里程现阶段还达不到令人满意的要求,这成为制约纯电动汽车发展的一个重要因素。为了纯电动汽车延长续驶里程,许多学者进行了各种研究,指出能量管理与扭矩分配[2-4]是最为关键的两个方面。同时指出能量管理和扭矩分配还需要符合驾驶员的驾驶意图。
目前,纯电动汽车对驾驶员驱动意图的识别主要依靠加速踏板开度和制动踏板开度等参数。文献[5]通过识别车速、加速度均值和电池荷电状态(SOC)3个参数,利用隶属度函数和模糊规则判断驾驶意图,输出目标的驱动模式。文献[6]等将整车驱动模式分为常规模式、经济模式和动力模式,以加速踏板、电机转速、SOC等为输入,利用模糊控制算法输出目标转矩。文献[7-8]将加速意图分为平缓加速、紧急加速和一般加速三类,并把加速踏板变化率、加速踏板开度做为输入量,建立了神经网络模型,从而得到驾驶意图推理规则。
为了精确识别驾驶意图,延长纯电动汽车的续驶里程,文中针对驱动方面的驾驶意图提出一种利用多个参数支持向量机识别驾驶意图的方法。
1 驾驶意图参数的选取
文中驾驶意图分为三类:紧急加速、一般加速和平缓加速。主要把加速踏板位移加速度、加速踏板开度作为支持向量机模型的输入量,用于辨别驾驶员的加速意图。这两个参数直接反映了驾驶员对速度要求的程度。
图1 参数选择分类图
2 支持向量机概述
支持向量机(Support Vector Machine, SVM)是基于统计学习理论的一种机器学习方法,可在模型的复杂度和学习能力之间获得较佳折衷,并可转化为凸二次优化问题进行求解。因支持向量机算法简单,且学习后得到的模型有较强的推广能力,适合文中小样本学习的情况。
设序号为i的训练样本点为(xi,yi),其中xi为样本的属性,在文中xi由2个属性构成,分别是加速踏板位移si,加速踏板位移变化率ai;yi为该样本的分类标签,标签1表示平缓加速,标签2表示一般加速,标签3表示紧急加速。
一般情况下,设样本有m个属性,则在训练过程中支持向量机希望获得m维分类超平面w·x+b=0,使所有训练样本(xi,yi)满足:

为了求解上述优化问题,构造拉格朗日函数:

式中:n----训练样本的个数。
为了求解该函数,分别对w,b,αi求偏导,并令其等于0,则式(3)的优化问题可转化为αi的凸二次规划寻优的对偶问题:

f(x)= sgn((w*·x)+b*)=
式中:x----待识别的样本。
式(4)的计算中包含向量的点积,为提高计算效率,引入核函数K(xi,xj)来计算变换后高维空间中的向量点积zi·zj,并且引入松弛变量ξi来容许部分训练样本错分,最后引入惩罚项Cξi来劝和错分点对最优分类面的影响。此时最优分类面的求解转化如下:
其对偶的凸二次规划问题为:
求解后可得αi的最优解,此时得到最佳的分类识别器,其判别函数为:
3 驾驶意图识别器训练
文中采用径向基核函数K(x,xi)=exp(-γ‖x-xi‖2)作为支持向量机模型的核函数。RBF核函数可以将一个样本映射到一个更高维的空间,而且与多项式核函数相比,RBF需要确定的参数要少,减少了函数的复杂程度,同时也减少了数值的计算困难。在上述优化问题中,主要存在两个优化参数惩罚因子c和核函数参数γ,这两个参数直接影响了预测精度,所以选择这两个参数尤为重要。文中通过网格划分[9]的方法对参数c和g进行选取。选取了60组数据,其中30组作为训练数据,30组作为验证数据,分别见表1和表2。
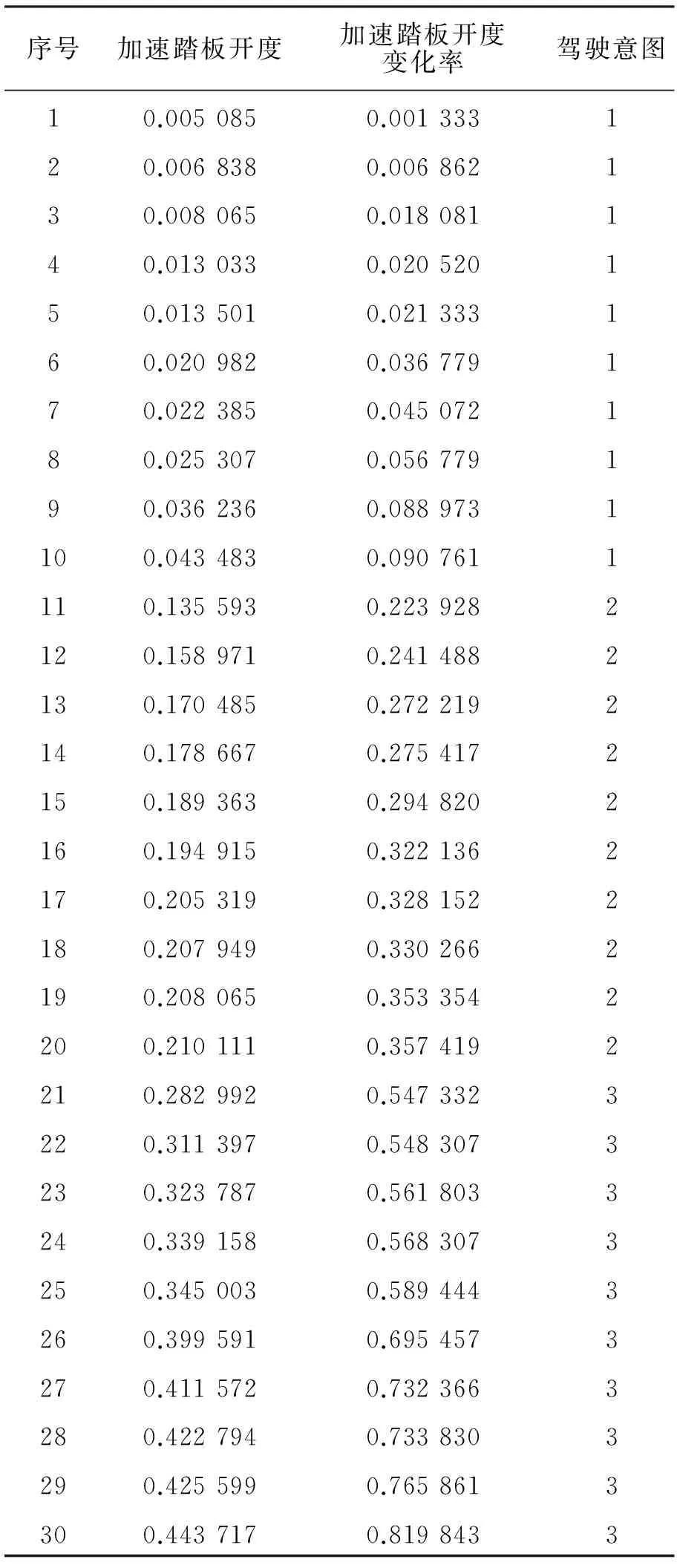
表1 训练数据
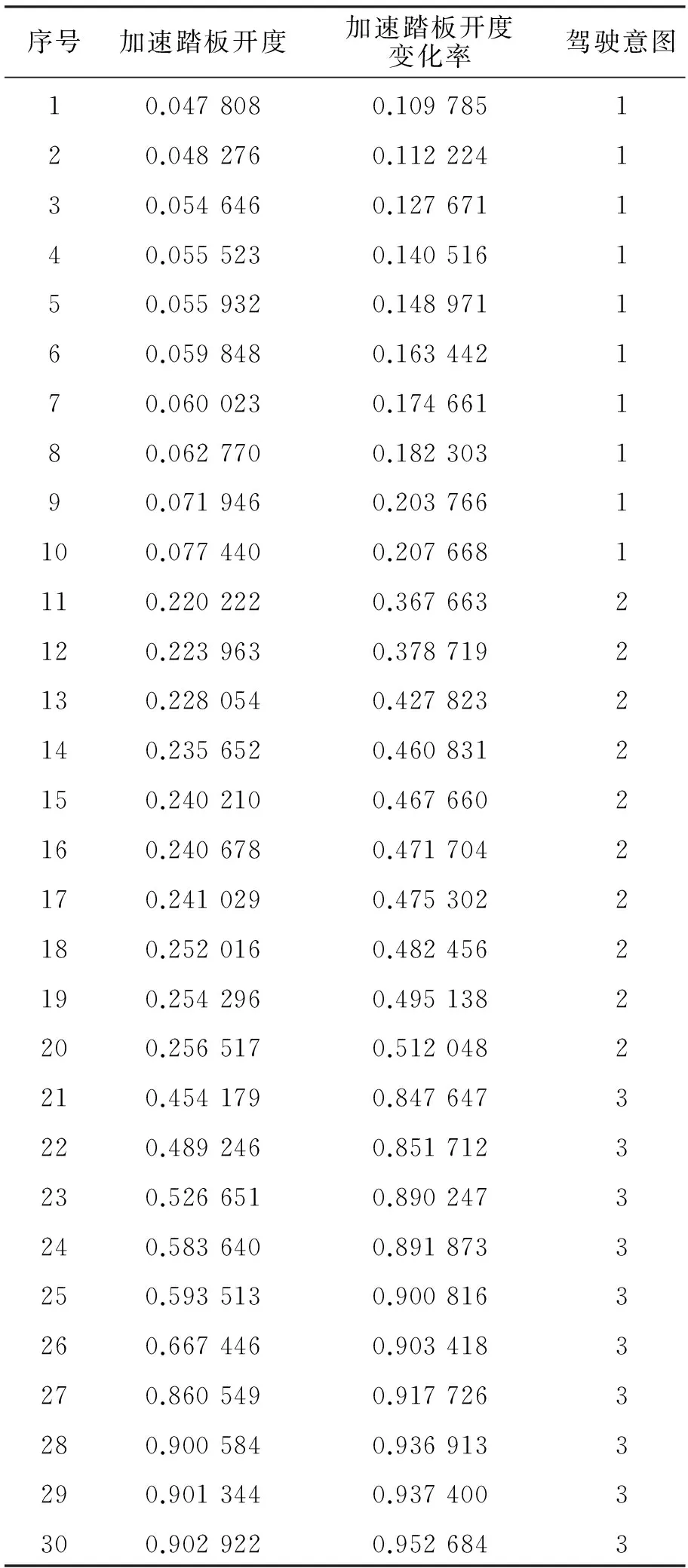
表2 验证数据
4 交叉验证选择最佳参数c和g
目前对SVM参数选取常用的方法是让c和g两个参数在一定范围内取值,对于c和g取定值的时候,把训练数据集作为原始数据集并利用K-CV方法得到在此组c和g下训练集验证分类准确率,最终取使训练集验证分类准确率最高的那组c和g作为最佳参数。由于c越小使得分类器的泛化能力越强,当有多组c和g取得最高分类准确率时,取c最小的那组参数。
文中先让c和g在[2-10,210]的范围内寻找最佳取值。经过训练得到最优解,其中,第1组c=0.435 28,g=4,该参数选择结果等高线图和3D视图分别如图2和图3所示。
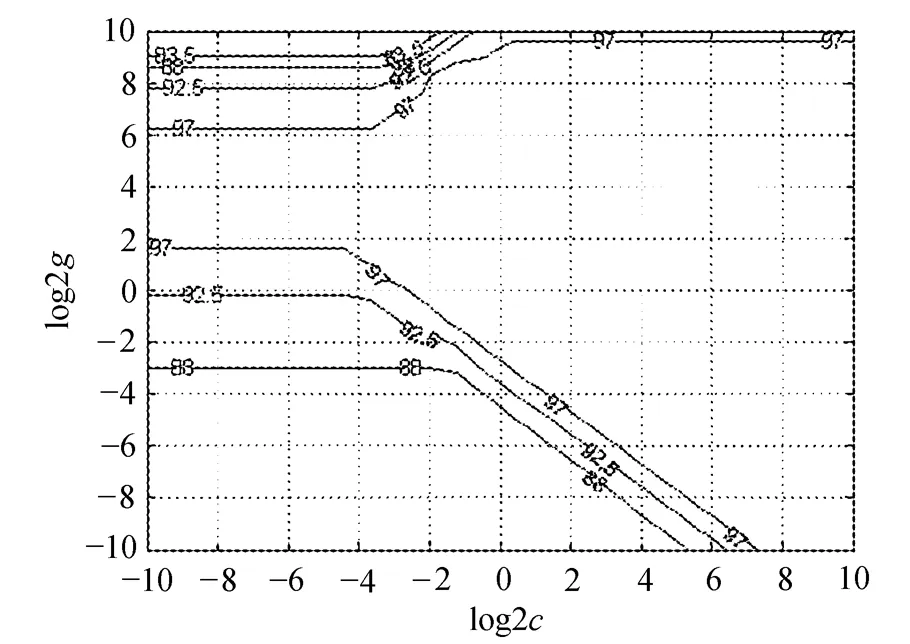
图2 参数选择结果等高线视图
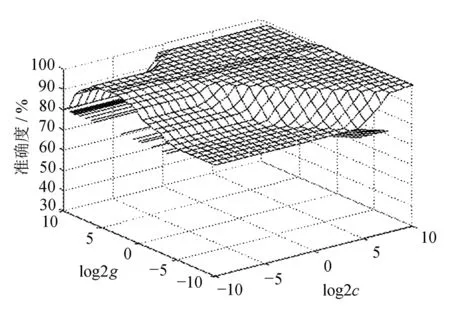
图3 参数选择结果3D视图
等高线表示取相对应的c和g后对应的K-CV方法的准确率。
通过上图可以看出,c的最佳取值范围在[2-4,24],所以在该基础上再进行一次筛选,从而得到比较精确的c和g。再次训练可得c=0.062 5,g=4,该参数选择结果等高线图和3D视图分别如图4和图5所示。

图4 参数选择结果等高线视图
5 训练结果
经过参数寻优的SVM训练之后,对于3个加速意图的识别,该模型的预测精度达到了99.33%。实验对比如图6所示。
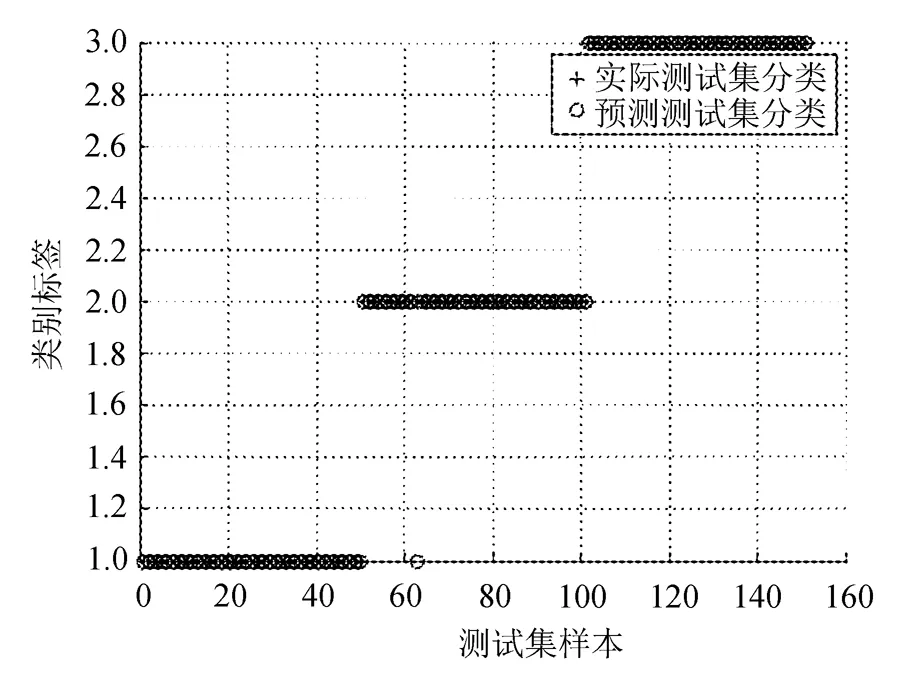
图6 测试集实际分类和预测分类
6 结 语
1) 预测实验获得了很好的预测精度,验证了支持向量机算法应用于纯电动客车驱动驾驶意图判断的可行性。
2)在采取SVM模型进行驾驶意图预测时,受限于实验数据,只选择了两个特征向量。在实际应用时,可以通过多次试验获得关于纯电动客车加速情况下的其它参数,如电池SOC、电机转矩的变化率等,使得SVM预测模型的属性增多,提高预测模型的精度。
对SVM在纯电动客车驾驶意图预测领域内的应用研究进行了初步探索,提出了把参数优化后的SVM应用于识别纯电动客车驾驶意图的方法。实验表明,SVM可以有效地识别出纯电动汽车的驾驶意图,但是实验还需要更多的数据进行支持验证和进一步的完善。
[1] 孙国春,郭辉.汽车动力总成振动控制研究[J].长春工业大学学报:自然科学版,2009,30(2):162-168.
[2] 钱立军,袭著永,赵韩.基于模糊神经网络的混合动力汽车控制策略仿真[J].系统仿真学报,2006,18(5):1384-1387.
[3] 吴剑,张承慧,崔纳新.并联式混合动力汽车的BP网络实时能量管理[J].电机与控制学报,2008,12(5):610-614.
[4] Ehsani M, Gao Y, Miller J M. Hybrid electric vehicles: architecture and motor drivers [J]. Proceeding of the IEEE,2007,95(4):719-728.
[5] 初亮,张培志,林婷婷.纯电动轿车模式识别及模式切换策略[J].华中科技大学学报:自然科学版,2014,42(6):12-16.
[6] 王佳,杨建中,蔡志标,等.基于模糊控制的纯电动轿车整车优化控制策略[J].汽车工程,2009,31(4):362-365.
[7] 王庆年,唐先智,王鹏宇,等.基于驾驶意图识别的混合动力汽车控制策略[J].吉林大学学报:工学版,2012,42(4):789-795.
[8] 王庆年,唐先智,王鹏宇.基于神经网络的混合动力汽车驾驶意图识别方法[J].农业机械学报,2012,43(8):32-36.
[9] 王健峰,张磊,陈国兴,等.基于改进的网格搜索法的SVM参数优化[J].应用科技,2012,39(3):28-31.
Identification of drive intention of HEV based on SVM
LI Hui, TAN Shengbin, ZHANG Shuo
(School of Electrical & Electronic Engineering, Changchun University of Technology, Changchun 130012, China)
Support Vector Machine (SVM) is used for predicting driver intention by training the SVM. The opening degree and displacement of acceleration pedals are the inputs of the driver intention judgement model with grid optimization algorithm. Simulation results show the accuracy of the judgement is up to 99%.
drive intention; Support Vector Machine (SVM); Hybrid Electric Vehicle (HEV).
2017-01-20
长春工业大学与中国第一汽车股份有限公司技术中心合作项目(W65-GNZX-2016-0009)
李 慧(1973-),女,汉族,吉林长春人,长春工业大学教授,博士,主要从事生产过程控制、自动化、最优控制方向研究,E-mail:lihui@ccut.edu.cn.
10.15923/j.cnki.cn22-1382/t.2017.2.06
TP 181
A
1674-1374(2017)02-0133-05
