滑动耕作部件作业阻力测试装置设计与试验
2017-06-05贾洪雷罗晓峰王文君赵佳乐郭明卓
贾洪雷 罗晓峰 王文君 赵佳乐 郭明卓 庄 健
(1.吉林大学工程仿生教育部重点实验室, 长春 130025;2.吉林大学生物与农业工程学院, 长春 130025)
滑动耕作部件作业阻力测试装置设计与试验
贾洪雷1,2罗晓峰1,2王文君1,2赵佳乐1,2郭明卓1,2庄 健1,2
(1.吉林大学工程仿生教育部重点实验室, 长春 130025;2.吉林大学生物与农业工程学院, 长春 130025)
针对农业机械滑动耕作部件(如深松铲、起垄铲等)田间作业时阻力采集困难和相关阻力测试装置结构复杂、维护使用成本高、缺乏过载保护等问题,设计了一种滑动式耕作部件作业阻力测试装置(TRTD)。TRTD包括部件安装库、扭转弹簧、旋转主轴、定位盘和编码器等,并以双翼型深松铲为例,建立了包含修正系数k与扭簧转角θ、耕深H、耕速v、土壤容积密度ρ、深松铲结构参数等换算关系的耕作阻力测试方法,与传统三点式作业阻力测试系统(TTD)在6组耕作条件下进行了土槽对比试验。试验通过F检验和T检验(α=0.05)得出2种测试装置测量值总体方差相同和均值一致。精度分析结果表明TRTD相比于TTD的最大相对误差为1.34%,波动性分析结果表明TRTD与TTD的波动幅值比较接近,两者最大相对偏差都不超过5%。TRTD满足阻力测试装置的精度和稳定性要求,能保证作业阻力采集的同时,具有过载保护功能。
耕作阻力; 测试装置; 深松铲; 设计; 试验
引言
耕整作业是农业生产过程中的关键环节,主要是以翻耕、深松和起垄等为主要方式进行作业[1-3]。耕整作业能够改善土壤结构,增加土壤透气性和透水性,提高土壤肥力等,其主要目的是为农作物播种、栽植创造良好的苗床条件[4-6]。
耕整作业是田间耕作中最基本的作业,也是机械化作业中消耗能量最大的作业项目之一[7-8]。耕作部件设计制造时,作业阻力是衡量其性能的主要技术指标[4,9-10]。因此,耕作部件阻力的实时精确测量对于耕作部件的优化设计至关重要。
为了准确测量部件的作业阻力,国内外有许多学者进行了关于阻力测试装置的研究。MCKYES等[11]通过压力计与液压装置组合设计了一种多连杆田间测试装置,对凿型铲的水平阻力进行了测试;赵金辉等[12-13]应用六分力测试装置与液压系统设计了开沟器性能测试装置,实现了开沟器的空间力学性能参数测试;郑海燕[14]设计了五连杆配套连接的农机具入土部件性能测试装置,通过在栅条上粘贴应变片和搭建测试电桥对花生收获机栅条的受力情况进行了测试;ARRIVO等[15]设计了一种田间牵引式农机具多功能测试装置,应用应变式传感器对农机具的牵引阻力进行了测试;WATTS等[16]设计了一种移动式阻力测试装置及其数据处理系统,通过压力传感器能够测量农机具工作时的牵引力;朱克亮[17]研发了基于虚拟仪器技术的压力传感器测力系统,对浅松铲进行了田间阻力测试;王景立等[18]采用八角环传感器测试了弧形深松铲的受力情况,为弧形深松铲的进一步优化设计提供了依据;IBRAHMI等[19]设计了一种角度可调式的阻力测试装置,用八角环传感器进行了犁板的阻力测试。
上述研究对耕作阻力测试装置的发展做出了很大贡献,但仍存在一些不足和问题,如:常用的测力传感器(压力传感器、八角环传感器)采用应变式传感器,需要校准,定期维护,在发生过载时极易损毁,对使用环境要求较高,且测试系统往往采用复杂的多连杆结构,纵向尺寸过长。为此,本文基于扭转弹簧特性,设计一种滑动式耕作部件作业阻力测试装置(简称测试装置,TRTD),该装置采用绝对式角位移传感器,通过扭转弹簧转矩和转角的关系,进行耕作阻力的测量,将传统的测力点从拖拉机的三点悬挂位置转移到农机具的机架位置,解决纵向结构尺寸过长的问题,且具有耕作阻力过载保护部件的优点。
1 测试装置整体结构设计
测试装置结构如图1所示,主要由部件安装库、扭转弹簧、旋转主轴、定位盘和编码器等部分组成。测试装置通过U型螺栓与作业机具的机架连接,耕作部件固定在部件安装库内,部件安装库固定设置在旋转主轴上,固定定位盘卡在部件安装库的方管内,扭转弹簧设置在固定定位盘和旋转定位盘之间,旋转主轴的一端通过联轴器连接编码器。测试装置通过对称设置的扭转弹簧,由绝对式角位移编码器进行主轴旋转时角度变化量的测量,通过扭转弹簧转矩与转角的关系,结合力学平衡公式,换算出耕作部件作业时水平耕作阻力的大小。
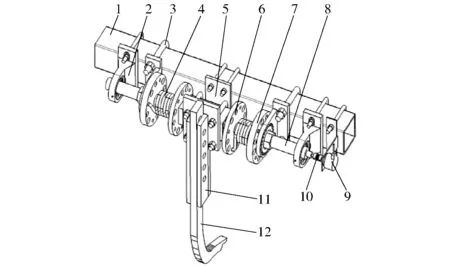
图1 耕作部件作业阻力测试装置结构图Fig.1 Structural diagram of tillage resistance testing device1.机架 2.带座轴承 3.U型螺栓 4.扭转弹簧 5.丝杠座 6.固定定位盘 7.旋转定位盘 8.主轴 9.编码器 10.联轴器11.部件安装库 12.耕作部件
阻力测试装置的结构参数会对其工作性能产生显著影响,因此本文需要合理设计其结构参数。测试装置的设计需要确定扭簧、定位盘、编码器等主要结构的参数。
1.1 扭转弹簧
测试装置的扭簧参数是由耕作部件的作业阻力大小决定的。耕整地作业时,不同耕作部件具有不同的耕作阻力[4]。同一耕作部件在不同耕深耕速、不同地块条件下,耕作阻力也有明显的差异[4,20]。测量耕作阻力时,扭簧刚度系数太小,容易造成扭簧疲软,导致耕作部件无法正常工作;而扭簧刚度系数过大,造成弹簧结构太大使测量精度下降。本文所设计的阻力测试装置用来测量耕作部件的水平耕作阻力,扭簧参数应与耕作部件作业阻力相匹配。因此,可通过耕作部件受力分析确定扭转弹簧的最大工作状态。
深松作业是重要的耕作作业环节,也是作业阻力最大的滑动耕作环节,对深松作业阻力的监测技术和装置的需求也最为迫切,因此本文以深松铲的结构、作业形式与阻力特性为例,进行测试装置工作性能的分析,并确定在进行深松作业阻力测试时系统弹簧元件的参数。
深松铲工作时的示意图如图2所示。RH为水平耕作阻力,L0为主轴轴心到深松铲尖的垂直距离,N(θ)为弹簧的最大工作扭矩。因耕作水平阻力的作用点到主轴轴心的垂直距离应小于L0,通过受力分析可得出
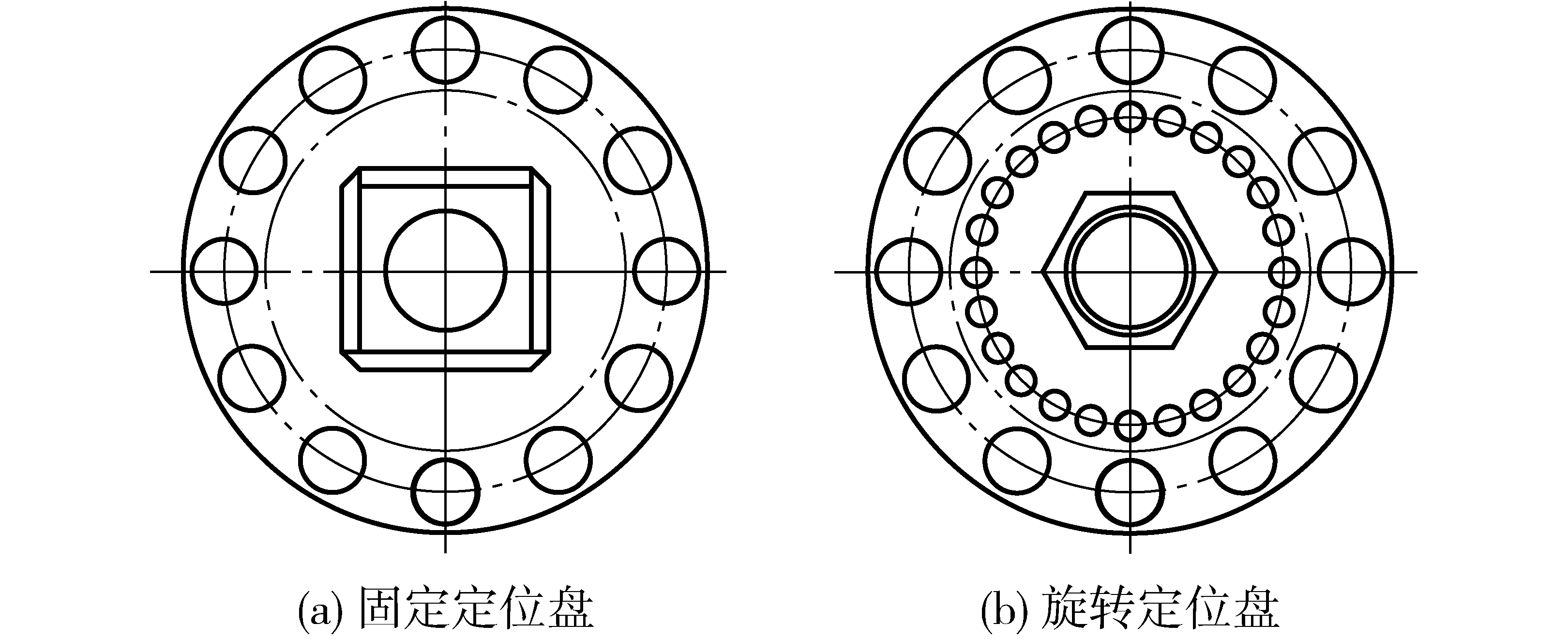
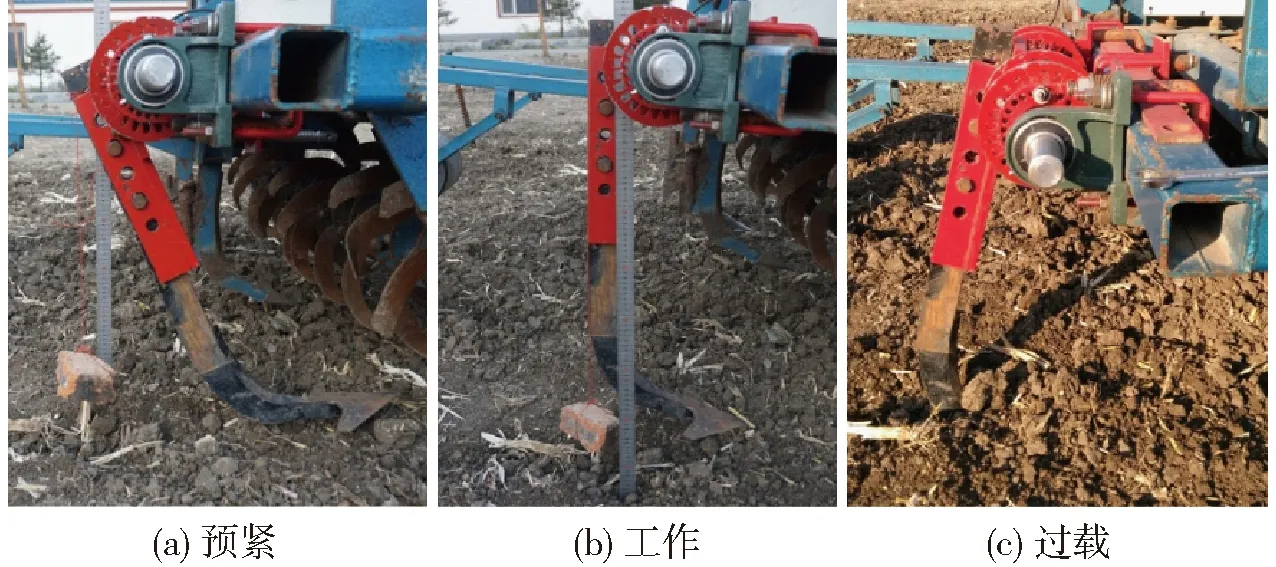
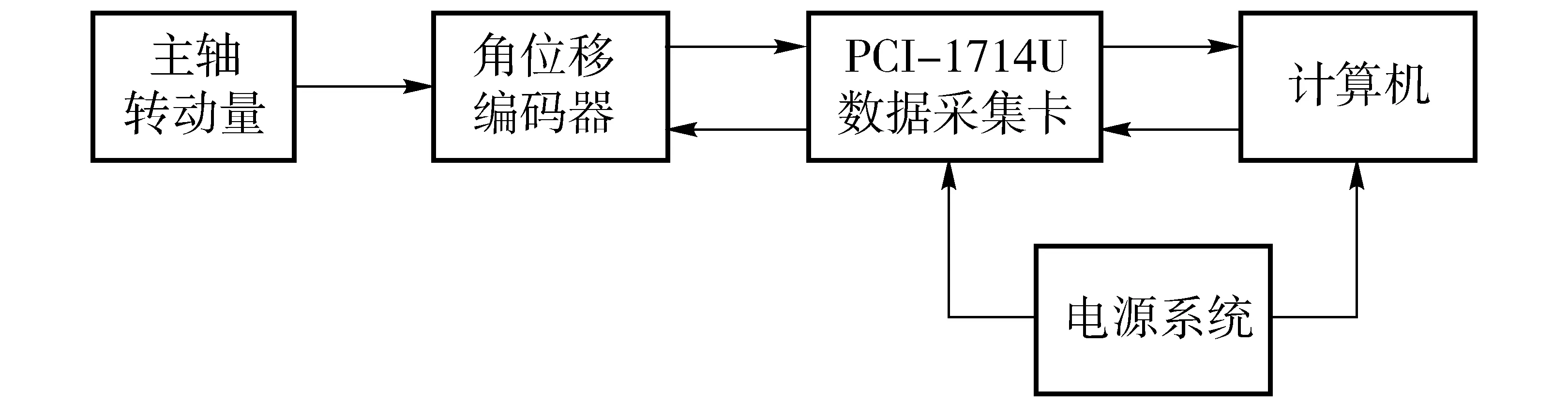
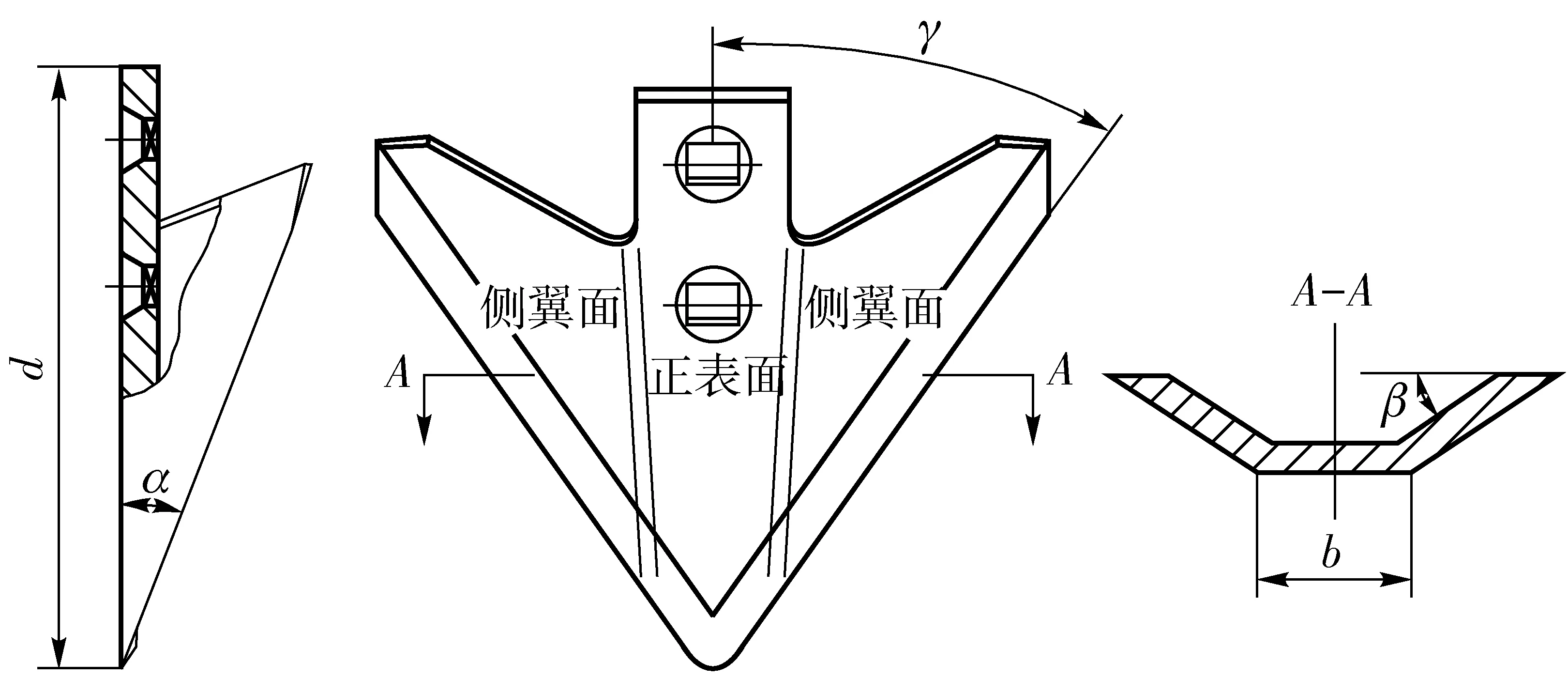
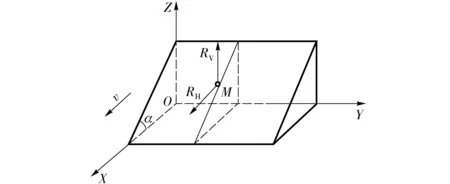
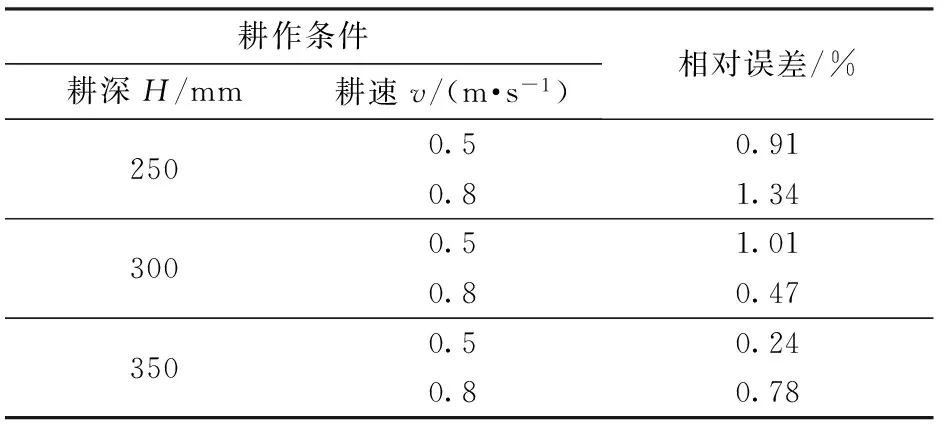
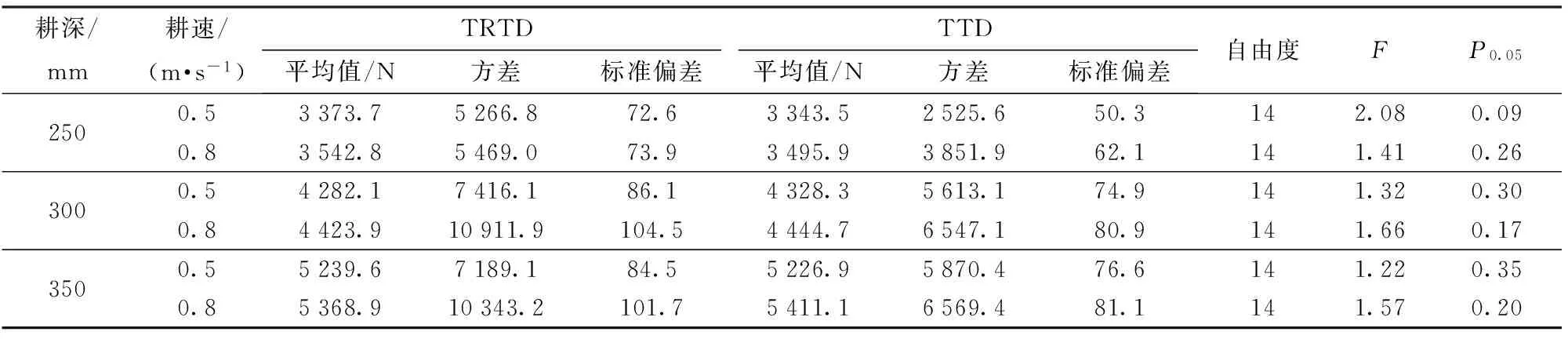
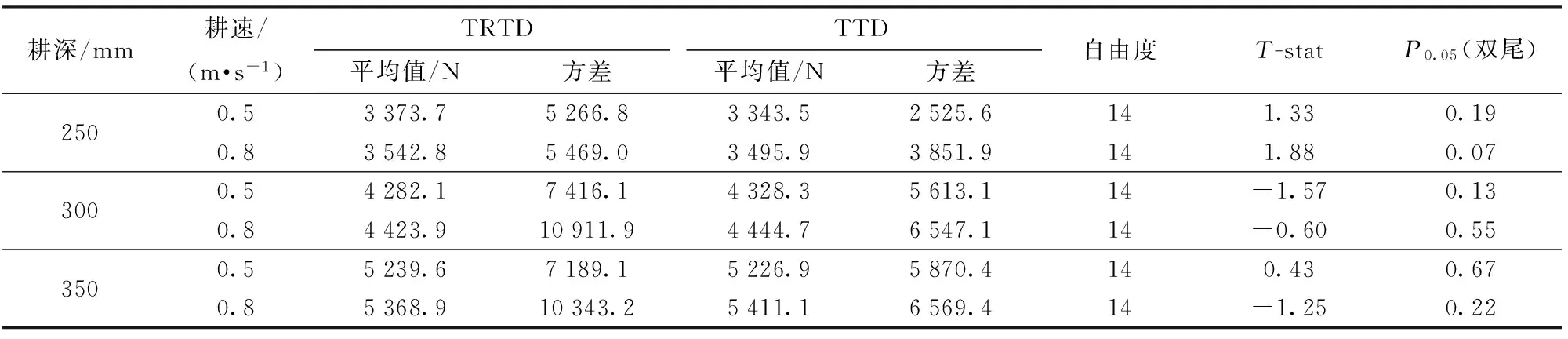
RHL=2N(θ) (L (1) 图2 深松铲受力分析图Fig.2 Force analysis diagram of subsoiler1.旋转主轴 2.部件安装库 3.耕作部件 根据东北地区农艺要求,基本农田进行深松作业时,深松深度一般为250~400 mm[21-23],本文设计深松铲最大安装高度(主轴轴心到深松铲尖的垂直距离)L0为500 mm,设计最大耕作阻力为8 kN[24]。在此基础上确定扭转弹簧最大工作状态下的扭矩 N(θ)=RH×0.5L0=2 000 N·m (2) 设计扭转弹簧的最小工作扭矩N′(θ)=0,最大工作扭矩N(θ)=2 000 N·m,工作扭转变形角θ=30°,自由角度为180°,端部为外臂扭转结构。 根据设计要求本文选用Ⅲ类载荷弹簧,材料为弹簧钢,钢牌号为60Si2MnA,其钢丝代号为TDSiMn。初步假设钢丝直径20~25 mm。从机械设计手册[25]表16.1-4查得材料弹性模量E=206 GPa,从表16.1-7查得材料抗拉强度σb为1 500~1 650 MPa,取σb=1 650 MPa,从表16.1-10得,按Ⅲ类载荷取许用弯曲应力σBp=0.8σb=0.8×1 650 MPa=1 320 MPa。 因扭矩旋向和弹簧旋向相同,取曲度系数K1=1,计算弹簧钢丝线径d为 (3) 本文线径取整,d=25 mm,与假设基本符合。按表16.1-3为使结构紧凑,选取旋绕比C=3.6,则弹簧中径D=Cd=3.6×25=90 mm,取D=90 mm,弹簧内径D1=D-d=90-25=65 mm,弹簧外径D2=D+d=90+25=115 mm。弹簧的有效圈数n为 (4) 考虑到自由角度为180°,弹簧的有效圈数取n=3.5圈。弹簧刚度T为 69 663.6 N·mm/(°) (5) 1.2 定位盘 测试装置通过固定定位盘固定扭簧的一端支出臂,通过旋转定位盘定位扭簧的另一端支出臂。图3a为固定定位盘结构示意图,圆盘外圆周分布定位孔,圆周分布角度为30°,孔径和扭簧线径相配合,圆盘一端面固定设置有方钢,可通过方钢卡在部件安装库的矩形方钢内,对固定定位盘进行定位。图3b为旋转定位盘结构示意图,圆盘外圆周分布定位孔,圆周分布角度为30°,孔径和扭簧线径相配合;圆盘内圆周分布销孔,圆周分布角度为15°,用来固定定位;圆盘一端面固定设置有空心六角钢,可通过转动六角钢进行旋转定位盘的定位,从而满足扭转弹簧一端的安装和预紧。如图4所示,测试装置可通过扭簧受力转动至预紧、工作和过载3种状态。 图3 定位盘Fig.3 Positioning plates 图4 3种工作状态Fig.4 Three kinds of working state 图5 信号采集电路框图Fig.5 Frame diagram of signal acquisition circuit 1.3 信号采集系统 信号采集系统框图如图5所示,包括角位移编码器、PCI-1714U数据采集卡、计算机和电源系统。测试装置通过扭转弹簧转矩与转角的关系进行部件耕作阻力大小的受力分析,在作业工作中对转角的精确测量至关重要。本文选用光洋电子生产的TDR-NA1024NW型绝对式角位移编码器,该编码器转轴的每个转角都对应有唯一的编码,角度精度为0.176°,对应的输出转矩精度为12.26 N·m。 2.1 深松铲受力分析 双翼型深松铲是应用较为广泛的一种深松铲,研究者对此型深松铲的作业阻力构成和运动学行为进行过深入的分析,因此,以双翼型深松铲为例,进行测试装置测试过程中受力分析及测试方法的确定。 双翼型深松铲按照我国机械行业标准JB/T 9788—1999进行设计制造。双翼型深松铲尖如图6所示,其中α=17.2°、β=39°、γ=30°。 图6 双翼型深松铲铲尖结构示意图Fig.6 Structural diagram of double-wings subsoiler 深松铲由铲尖和铲柄两部分组成,深松工作时,耕作阻力来自于铲尖和铲柄抵抗土壤颗粒的作用力。深松铲工作中所受土壤颗粒的阻力,一方面是来自土壤粘附和摩擦的水平作用力,另一方面是来自竖直方向只对土壤产生压实作用的垂直作用力[24]。因此,本文分析双翼型深松铲水平方向的阻力,双翼型深松铲的水平耕作阻力RH由3部分组成:铲尖正表面作业阻力RH1、铲尖侧翼面作业阻力RH2、铲柄刃表面作业阻力RH3。 李范哲等[26]提出了土壤工作部件工作阻力的数学模型,其中介绍了二面楔子受力的数学模型,如图7所示,二面楔子在土壤中沿X轴方向前进时,二面楔子上任一点M受到的楔子表面作用力可以分解为一对正交作用力RH和RV。 图7 二面楔子上土壤颗粒M受力示意图Fig.7 Force diagram of soil particle on two-side wedge 楔面上任一质量为m的土壤颗粒质点M的水平作用力RH可以用该质点在相互作用时间Δt内水平方向的动量变化来确定,应用冲量定理得 (6) 式中 Δt——土壤颗粒质点速度从v0到vt的时间 v0——土壤颗粒质点初速度 vt——土壤颗粒质点末速度 末速度vt与部件的移动速度v呈正相关,vt∝v。根据作用力与反作用力定律,楔面受到来自土壤颗粒质点M的水平作用阻力与RH大小相等。在Δt时间内,整个楔面受到土壤颗粒作用的水平作用力为 (7) 式中mz——Δt时间内通过楔面的土壤颗粒质点的总质量 双翼型深松铲工作时,铲尖正表面是一个典型的二面楔子。根据二面楔子受力模型,得到铲尖正表面所受的水平作业阻力为 (8) 式中m1——Δt时间内通过铲尖正表面的土壤颗粒质点总质量 李范哲等[26]提出的数学模型,也介绍了复合楔子受力的数学模型,如图8所示,三面楔子在土壤中沿X轴方向前进时,得到三面楔子楔面前进方向所受的水平作用力为 (9) 图8 三面楔子上土壤颗粒M受力示意图Fig.8 Force diagram of soil particle on three-side wedge 双翼型深松铲铲尖单个侧翼面工作表面形态接近三面楔子表面形态,在分析铲尖侧翼面作业阻力时,通过引入三面楔子受力模型进行分析。得到整个侧翼面工作表面上的水平作用阻力为 (10) 式中m2——Δt时间内通过铲尖单个侧翼面的土壤颗粒质点总质量 图9为铲柄上任一土壤颗粒质点M的受力示意图。深松铲工作时,铲柄两侧刃表面的水平受力相同。铲柄单侧可看作为一个二面楔子,根据上述二面楔子受力模型,可以得到铲柄刃表面所受水平作业阻力为 (11) 式中m3——Δt时间内通过铲柄单侧刃表面的土壤颗粒质点总质量 图9 铲柄上土壤颗粒M受力示意图Fig.9 Force diagram of soil particle on shovel surface Δt时间内通过楔子表面有效面积A的土壤颗粒体积Q=vtΔtA,因此Δt时间内通过某表面的土壤颗粒质点总质量为 mz=ρQ=ρvtΔtA (12) 式中ρ——土壤容积密度 2.2 测试公式计算 通过上述工作,得知双翼型深松铲的受力基本情况。可得到双翼型深松铲的耕作阻力RH为RH1、RH2和RH3的合力 RH=RH1+RH2+RH3 (13) 测试装置通过绝对式角位移编码器采集扭转弹簧转动的角度,根据扭转弹簧转矩N与转角θ的关系,得出总转矩。根据图2所示深松铲受力分析图,可得到 (RH1+RH2)(L0-L3/2)+RH3(L1+L2/2)=2N(θ) (14) 其中 L1=L0-HL2=H-L3 综合式(8)、(10)、(11)、(12)、(14)得 (15) 式中b0——铲柄宽度 土壤颗粒质点M的末速度vt与部件的移动速度v呈正相关,vt∝v。田间未耕作的土壤容积密度一般随深度增加而增加,所以土壤容积密度ρ与耕深H呈正相关,ρ=ρ(H)。因此,通过增加修正系数k修正公式(15),得到 (16) 通过扭转弹簧转角与转矩之间的关系得到修正系数 (17) 从式(17)可以看出,修正系数k是关于扭转弹簧设计参数(T、θ等)、部件结构参数(α、β、γ、b、d等)、土壤类型参数(ρ、ψ等)、部件安装位置(θ、L等)、耕深H、耕速v等因素的函数。 RH1=kρ(H)v2bdsin(α0+Δθ) (18) RH2= (19) RH3=kρ(H)v2b0(H-L3) (20) 结合以上各式得到水平耕作阻力 RH=RH1+RH2+RH3= (21) 综上所述,测试装置通过获取扭转弹簧的转动角度θ,结合式(17)即可对修正系数k进行求解,针对不同的部件结构参数(α、β、γ、b、d等)、作业深度H、作业速度v、土壤类型参数(ρ、ψ等)等因素,均可通过更换扭转弹簧和调试部件安装位置(角度θ和高度L)来调节计算公式中的k值,实现对水平耕作阻力RH的准确测量。 为验证测试装置对滑动耕作阻力测试的准确性,将测试装置TRTD与三点式作业阻力测试装置(TTD)进行串联,并进行耕作阻力测试试验,以验证测试装置的准确性和可靠性。 三点式作业阻力测试装置主要由三点悬挂系统、压力传感器、扭力传感器、信号采集系统和安装机架构成,其主要工作机理为利用试验台车前进时由于深松铲耕作阻力的存在对传感器产生应变,传感器将应变信号转换为电信号传给位于台车上的数据采集接收系统,其测量精度可达0.25%FS[24]。 3.1 试验设备和试验方法 试验在吉林大学生物与农业工程学院农业工程土槽实验室的室内土槽进行,土槽长30 m,宽2 m,深1 m,土槽土壤为典型东北地区黑壤土,其粒度均匀,透气和透水性能良好。试验前一周对土槽试验区进行旋耕机耕翻、镇压辊平整,适量浇水渗透,并用塑料薄膜覆盖。试验前,用TDR-300型土壤水分测试仪测得土壤体积含水率为21%,用环刀组件测得土槽各深度的土壤容积密度为:0~100 mm为1.05 g/cm3,100~200 mm为1.13 g/cm3,200~300 mm为1.25 g/cm3,300~400 mm为1.32 g/cm3。土壤温度为21℃。图10所示为土槽试验台车,自带液压悬挂系统,最高速度为3 m/s,单程运行距离为30 m。 图10 电力变频四轮驱动土槽试验车Fig.10 Four-wheel drive experimental trolley 为减少对比试验时土壤参数变化带来的系统误差,采用同一次试验采集两种阻力测试装置数据的测试方法。如图11所示,传统三点式作业阻力测试装置通过压力和扭力传感器与台车的三点液压悬挂装置相连,设计的测试装置安装在TTD装置的测力架上。 图11 阻力测试装置连接图Fig.11 Connection diagram of tillage resistance testing device 每组试验重复3次,每次试验在阻力稳定段每隔0.5 s取一观测值,每次试验共取5个,每组试验共15个。为保证试验的可靠性,每次试验后对土槽内土壤进行旋耕机耕翻、镇压辊平整。用SC-900型土壤紧实度仪测试,达到试验要求的土壤坚实度,同时保证每次试验前的各土壤参数误差在10%以内。 3.2 试验方案 通过控制变量法,在同等耕作条件下,通过两阻力测试装置分别测得深松铲的水平耕作阻力,并探讨TRTD测试装置与TTD测试装置所测耕作阻力值的差异是否显著,以及TRTD阻力测试的稳定性和精度。 试验选择了影响耕作阻力大小的2个主要因素:耕深H和耕速v。耕深H选取250、300、350 mm 3个水平,耕速v选取0.5、0.8 m/s 2个水平。 3.3 试验结果与分析 3.3.1 TRTD阻力测试装置的精度分析 采用TRTD和TTD两种测试装置进行土槽对比试验,图12为两种测试装置在6组耕作条件下得到的阻力测试试验结果。从图中可以看出,两种测试装置在6组相同条件下测得的水平耕作阻力基本接近;在同一耕深下,随着耕速从0.5 m/s(v1)增加到0.8 m/s(v2)时,水平耕作阻力略微增加;在同一耕速下,随着耕深从250 mm(H1)增加到350 mm(H3)时,水平耕作阻力显著增加。 图12 水平耕作阻力测试结果Fig.12 Test results of tillage resistance in horizontal direction 本文通过相对误差的计算对TRTD测试装置的测量精度进行分析。其相对误差公式为 (22) 式中E——相对误差,%FA——TDTR阻力测试值,NFO——TTD 阻力测试值,N 表1为6组不同耕作条件下相对误差统计结果。从表中可以看出,在6组不同耕作条件下,TRTD测试装置相对于TTD测试装置的最大相对误差为1.34%,最小相对误差为0.24%,说明TRTD测试装置与TTD测试装置具有接近的测量精度。 图13 不同耕作条件下两种测试装置的相对偏差Fig.13 Relative deviations of both resistance testing devices under different cultivation conditions 耕作条件耕深H/mm耕速v/(m·s-1)相对误差/%2500.50.910.81.343000.51.010.80.473500.50.240.80.78 3.3.2 TRTD 阻力测试装置的波动性分析 通过相对偏差衡量各取样点阻力测量值对该样本平均值的偏离程度,本文对TRTD测试装置和TTD测试装置的测量波动性进行对比分析。相对偏差公式为 (23) 图13为2种测试装置在6组不同耕作条件下的相对偏差结果。可以明显看出2种测试装置在6组耕作条件下的相对偏差最大都不超过5%,多数测量点低于3%,说明两者的单项阻力测量值分别相对其平均值的偏离程度较小;且同一耕作条件下相对偏差范围基本相近,说明两种测试装置的波动幅值接近,具有较高的一致性。 3.3.3 试验结果的方差齐性和均值一致性分析 本文通过应用F检验对2种测试装置试验结果样本的方差齐性进行分析,表2为本试验结果的F检验分析。从表2中可以得出,6组耕作条件下的阻力测试数据F 将两种测试装置在同一耕作条件下的对比数据进行二样本T检验,以考察两种装置所测样本的均值是否具有一致性。从上文的F检验得知两种测试方法所测数据的样本方差没有显著性差异,即等方差,因此,本文应用双样本等方差T检验。表3为试验结果的T检验分析表。由T检验结果得出,各组样本对比数据的P0.05均大于显著性水平α=0.05,说明两种方法在同一耕作条件下所测的阻力值没有显著性差异,由此进一步说明了两种测试方法的测试结果一致性。 表2 试验结果的F检验 表3 试验结果的T检验 (1)设计了一种滑动式耕作部件作业阻力测试装置。通过理论分析和计算确定了测试装置的扭簧参数、定位盘结构和编码器的选用等。 (2)通过对双翼型深松铲进行受力分析,双翼型深松铲水平耕作阻力分为铲尖正表面作业阻力RH1、铲尖翼表面作业阻力RH2和铲柄刃表面作业阻力RH3。结合TRTD测试装置,建立了包含修正系数k与扭簧转角θ、耕深H、耕速v、土壤容积密度ρ、深松铲结构参数等关系的耕作阻力测试方法。TRTD通过调节弹簧预紧状态和求解修正系数k实现对不同耕作条件下的阻力测试,具有可扩展性和适用性的特点,维护成本低,可对机具结构实现有效保护。 (3)TRTD测试装置与传统三点式作业阻力测试装置进行了土槽对比试验。通过精度分析结果表明:TRTD测试装置相对于TTD测试装置的最大相对误差为1.34%,最小相对误差为0.24%;通过波动性分析结果表明:2种测试装置在6组耕作条件下的相对偏差最大都不超过5%。在同一耕作条件下误差的波动幅值基本相近;通过F检验分析得到2种阻力测试装置在各组耕作条件下的阻力测量值样本方差没有显著性差异;通过T检验分析2种阻力测试装置在各组耕作条件下的阻力测量值样本的均值没有显著性差异。因此,TRTD测试装置能有效地进行部件水平耕作阻力的测量。 1 中国农业机械化科学研究院. 农业机械设计手册[M]. 北京: 中国农业科学技术出版社, 2007. 2 曾德超. 机械土壤动力学[M]. 北京: 北京科学技术出版社, 1995. 3 李宝筏. 农业机械学[M]. 北京: 中国农业出版社, 2003. 4 [美]吉尔W R, 范德伯奇 B G E. 耕作与牵引土壤动力学[M]. 北京: 中国农业机械出版社, 1983. 5 王建林. 高级耕作学[M]. 北京: 中国农业出版社, 2013. 6 JIA H L, WANG W J, LUO X F, et al. Effects of profiling elastic press roller on seedbed properties and soybean emergence under double row ridge cultivation[J/OL]. Soil & Tillage Research, 2016, 162: 34-40.http:∥dx.doi.org/10.1016/j.still.2016.04.011. DOI: 10.1016/j.still.2016.04.011. 7 郭志军, 周德义, 周志立. 几种不同触土曲面耕作部件的力学性能仿真研究[J]. 机械工程学报, 2010, 46(15): 71-75. GUO Zhijun, ZHOU Deyi, ZHOU Zhili. Simulation research on mechanical performances of several kinds of cultivating components with different soil-engaging surfaces[J]. Journal of Mechanical Engineering, 2010, 46(15): 71-75. (in Chinese) 8 IBRAHMI A, BENTAHER H, MAALEJ A, et al. Study the effect of tool geometry and operational conditions on mouldboard plough forces and energy requirement: Part 1. finite element simulation[J]. Computers and Electronics in Agriculture, 2015, 117:258-267. 9 郭志军, 杜干, 周志立, 等. 土壤耕作部件宏观触土曲面减阻性能研究现状分析[J]. 农业机械学报, 2011, 42(6): 47-52. GUO Zhijun, DU Gan, ZHOU Zhili, et al. Actuality analysis of resistance-reducing properties on soil cultivating components with different macroscopic soil-engaging surfaces[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(6): 47-52. (in Chinese) 10 NIDAL H A, RANDALL C R. A nonlinear 3D finite element analysis of the soil forces acting on a disk plow[J/OL]. Soil & Tillage Research, 2003,74(2): 115-124. DOI: 10.1016/S0167-1987(03)00152-1. 11 MCKYES E, DESIR F L. Prediction and field measurements of tillage tool draft forces and efficiency in cohesive soils[J/OL]. Soil & Tillage Research, 1984, 4(5): 459-470. DOI: 10.1016/0167-1987(84)90053-9. 12 赵金辉, 杨学军, 周军平, 等. 播种机开沟器及其性能测试装置的现状分析[J]. 农机化研究, 2014, 36(1): 238-241. ZHAO Jinhui, YANG Xuejun, ZHOU Junping. et al. Analysis the current situation about furrow opener and its performance test device[J]. Journal of Agricultural Mechanization Research, 2014, 36(1): 238-241. (in Chinese) 13 赵金辉, 杨学军, 刘立晶,等. 基于PLC的播种机开沟器力学性能测试装置[J/OL]. 农业机械学报, 2014, 45(增刊): 29-34. http:∥www.j-csam.org/jcsam/ch/reader/create_pdf.aspx?file_no=2014s105&flag=1&journal_id=jcsam. DOI: 10.604l/ j.issn.1000-1298.2014.S0.005. ZHAO Jinhui, YANG Xuejun, LIU Lijing, et al. Mechanical performance testing device for planter openers based on PLC[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(Supp.): 29-34. (in Chinese) 14 郑海燕. 基于的农机具测试系统的研究[D]. 青岛: 青岛农业大学, 2009. 15 ARRIVO A, RENZO G C. Trailed unit for testing implements under field conditions[J]. Journal of Agricultural Engineering Research, 1998, 71(1): 19-24. 16 WATTS C W, LONGSTAFF D J. Mobile instrumentation and data processing system for testing field machinery[J/OL]. Journal of Agricultural Engineering Research, 1989, 43: 67-76. DOI: 10.1016/S0021-8634(89)80007-1. 17 朱克亮. 浅松机关键部件的实验研究及其测力系统的开发[D]. 北京:中国农业大学,2011. 18 王景立, 袁军. 基于八角环传感器的弧形深松铲阻力测试[J]. 中国农机化, 2012(4): 128-130. WANG Jingli, YUAN Jun. Determination of the force of curved sub-soiling shovel based on octagonal ring sensor[J]. Chinese Agricultural Mechanization, 2012(4): 128-130. (in Chinese) 19 IBRAHMI A, BENTAHER H, HAMZA E, et al. Study the effect of tool geometry and operational conditions on mouldboard plough forces and energy requirement: Part 2. experimental validation with soil bin test[J/OL]. Computers and Electronics in Agriculture, 2015, 117:268-275. DOI: 10.1016/j.compag.2015.08.004. 20 WALTER K B, KUSHWAHA R L. Tillage force prediction from terrain characterization with the bevameter[J/OL]. Soil & Tillage Research, 1991, 21(3-4): 299-308.DOI: 10.1016/0167-1987(91)90027-U. 21 张祥彩, 李洪文, 王庆杰, 等. 我国北方地区机械化深松技术的研究现状[J]. 农机化研究, 2015,37(8):261-264, 268. ZHANG Xiangcai, LI Hongwen, WANG Qingjie, et al. Research status on mechanized subsoiling technology in Northern China[J]. Journal of Agricultural Mechanization Research, 2015,37(8):261-264, 268. (in Chinese) 22 何进, 李洪文, 高焕文. 中国北方保护性耕作条件下深松效应与经济效益研究[J]. 农业工程学报, 2006, 22(10): 62-67. HE Jin, LI Hongwen, GAO Huanwen. Subsoiling effect and economic benefit under conservation tillage mode in Northern China[J]. Transactions of the CSAE, 2006, 22(10): 62-67. (in Chinese) 23 李洪文, 陈君达, 李问盈. 保护性耕作条件下深松技术研究[J]. 农业机械学报, 2000,31(6):42-45. LI Hongwen, CHEN Junda, LI Wenying. Study on subsoiling technique for conservation tillage field[J]. Transactions of the Chinese Society for Agricultural Machinery, 2000, 31(6):42-45. (in Chinese) 24 张金波. 深松铲减阻耐磨仿生理论与技术[D]. 长春:吉林大学, 2014. 25 闻邦椿. 机械设计手册[M]. 北京: 机械工业出版社, 2010. 26 李范哲, 朴今淑. 评价土壤工作部件工作阻力的数学模型[J]. 延边农学院学报, 1996, 18(3): 159-163. LI Fanzhe, PIAO Jinshu. Evaluation on mathematical model of soil workpiece resistance[J]. Agricultural Science Journal of Yanbian University, 1996, 18(3): 159-163. (in Chinese) Design and Experiment of Tillage Resistance Testing Device for Sliding Cultivate Component JIA Honglei1,2LUO Xiaofeng1,2WANG Wenjun1,2ZHAO Jiale1,2GUO Mingzhuo1,2ZHUANG Jian1,2 (1.KeyLaboratoryofBionicEngineering,MinistryofEducation,JilinUniversity,Changchun130025,China2.CollegeofBiologicalandAgriculturalEngineering,JilinUniversity,Changchun130025,China) Accurate measurement of tillage resistance for cultivate component is critical. The related resistance testing device has complex structure, high maintenance cost, lack of overload protection and difficulty in collection in farmland. Aiming at the problems of the related resistance testing device, the tillage resistance testing device (TRTD) for sliding cultivate component was designed. TRTD consisted of component library, torsional spring, rotation axis, positioning plate and encoder. The force analysis of double-wings subsoiler was carried out. A measurement method of tillage resistance was established which contained the relationship of correction factorkas a function of spring cornerθ, tilling depthH, tilling speedv, soil bulk densityρand subsoiler structure parameters. In order to evaluate the TRTD, a soil bin contrast test with traditional testing device (TTD) was conducted under six tillage condition treatments. The test results showed that the mean and variance of the measured sample from both testing devices had no significant difference. The results of precision analysis showed that the maximum relative error of TRTD was 1.34% compared with TTD. The results of fluctuation analysis showed that the fluctuation amplitude of TRTD was similar with that of TTD and both relative deviations were not more than 5%. TRTD met the requirement of accuracy and stability and possessed the function of overload protection as well as providing condition for acquisition of tillage resistance. tillage resistance; testing device; subsoiler; design; experiment 10.6041/j.issn.1000-1298.2017.04.007 2016-07-17 2016-10-24 “十二五”国家科技支撑计划项目(2014BAD06B03)、国家自然科学基金项目(51305158)和吉林省科技发展计划项目(20160312003ZG、20140307035NY、20140441006SC) 贾洪雷(1957—),男,教授,博士生导师,主要从事机械化保护性耕作技术等研究,E-mail: jiahl@vip.163.com 庄健(1981—),男,高级工程师,博士,主要从事农业机械关键部件研究,E-mail: zhuangjian_2001@163.com S220.2 A 1000-1298(2017)04-0056-09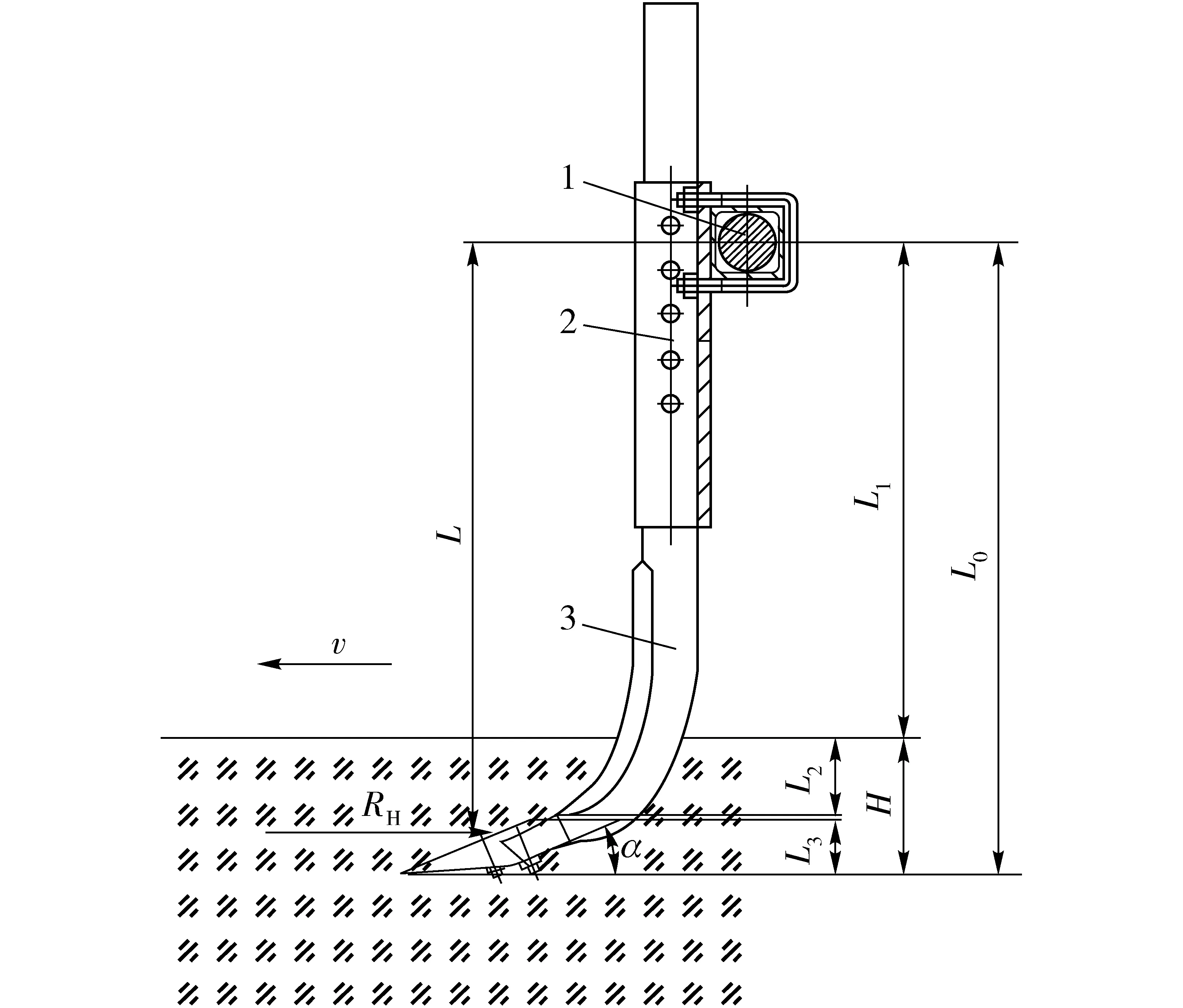
2 测试装置测试方法
3 土槽对比试验



4 结论
