北斗区域导航单点服务性能测试与分析
2017-06-05刘瑞华陈莹超孔月明殷浩远
刘瑞华,陈莹超,孔月明,殷浩远
(中国民航大学电子信息与自动化学院,天津 300300)
北斗区域导航单点服务性能测试与分析
刘瑞华,陈莹超,孔月明,殷浩远
(中国民航大学电子信息与自动化学院,天津 300300)
介绍了卫星导航系统基本性能指标及其评估方法,依据圆概率误差(CEP)、双倍距离均方根差(2DRMS)方法,对测点定位精度进行了分析。首先,仿真分析了实测数据下精度因子(DOP)与可见星数目的变化关系。然后,统计分析了测点在不同飞行阶段下的接收机自主完好性监测可用性和服务连续性时间百分比。结合实测数据的仿真分析结果表明:可见星数目大于7颗,能够满足定位要求;测点在95%置信概率条件下,三维定位精度优于20 m,水平精度优于15 m,垂直精度优于20 m,该服务精度满足飞行非精密进近(NPA)阶段导航性能要求。
北斗区域导航系统;定位精度;接收机自主监测;系统可用性;系统连续性
北斗卫星导航系统自2003年正式提供服务以来,在交通运输、海洋渔业、水文监测、气象测报、森林防火、通信时统、电力调度、救灾减灾和国家安全等诸多领域得到广泛应用,并产生显著的社会效益和经济效益。截止到2016年9月,在轨工作卫星有6颗地球静止轨道(GEO)卫星、8颗中圆轨道(MEO)卫星和8颗倾斜地球同步轨道(IGSO)卫星,北斗卫星导航系统目前已具备亚太区域导航服务能力。
导航定位精度、完好性和可用性是评估卫星导航系统基本性能的3个指标,称为卫星导航系统顶层性能指标(一级指标)[1]。其中,定位精度是最基本的指标,是其他两个指标的基础。各领域用户对定位性能要求不一致,这需要用户对定位性能有清楚的认知,确保满足自身服务性能的需求。民航领域对不同飞行阶段的精度要求不同,告警门限也不同[2]。本文采用经典的导航服务性能分析方法,结合北斗卫星导航系统当前星座下获取的实测数据,对静态定位下的DOP、可见星、定位精度等参数进行了深入的分析并对民航应用中不同飞行阶段下的可用性、服务连续性进行了统计。
1 北斗二代卫星导航系统定位方程概述
以测码伪距进行单点静态定位,接收机Ti于同一观测历元ti接收到4颗以上卫星时的定位误差方程为[3]

若接收机Ti的初始化向量Ri0=(xi0,yi0,zi0),则线性化方程如下
简化后可得
2 北斗卫星导航系统性能评估指标
2.1 定位服务精度
导航系统的定位精度,是指系统为运载体所提供的实时位置与运载体当时真实位置之间的重合度[1,4]。其受各种因素的影响,如发射信号的不稳定、接收设备的测量误差、传输环境对信号的影响及导航信号本身的不确定性等,通常可采用统计的方法来进行描述。基于统计的观点,导航系统的精度可以表示为在一定置信水平条件下所有误差不会超过的一个限值。这种对精度概念的定义适用于所有导航定位手段,是用户需要的最为直观的性能评价和表述。下面将利用圆概率误差(CEP)、双倍距离均方根差(2DRMS)两种方法对定位精度进行统计描述。
导航界,圆概率误差(CEP)是指在以天线真实位置为圆心的圆内,偏离圆心概率为50%的二维点位精度分布度量[5]。本文使用95%概率的二维点位精度,即

其中:σλ、σφ分别表示位置坐标分量经度和纬度方向的标准差。在作圆概率误差分析时,需将经、纬度坐标转换到真实位置的站心坐标系下[6-7]。
2DRMS统计描述方法可表示为

其中:σe、σn、σu分别表示位置坐标分量东向、北向和垂向的均方根误差。
2DRMS统计描述方法利用实测数据计算测点的定位精度。方法步骤如下:首先,使用接收机获取长时间观测的用户位置三维坐标,并转换为当地的站心坐标(N,E,U),同时记录观测的数据数目;其次,在不知用户真实位置的情况下,将长时间观测的大样本数据,在3个方向上以其均值来代替真实位置坐标;然后,用i表示第i个观测历元,并在站心坐标轴方向上分别与均值作差,记为dNi、dEi、dUi,将作为在N与E方向上的每个观测历元的误差值,表示垂直方向上的垂直误差值;最后,把这3组数据的绝对值按从小到大的顺序依次排列,根据2DRMS的95%置信概率,在3个方向上分别取得相应的数据为经过上述计算流程最终可以求出三维精度σ2DRMS,3d、水平精度和垂直精度
2.2 精度衰减因子
导航学中采用精度因子DOP的概念来评价定位的精度。精度因子的大小由空间卫星的几何分布决定,他是衡量卫星星座的重要指标,由表达式Q引出

假设接收机对各颗卫星的伪距测量误差相互独立,且测量方差相等,则不同形式的定位精度因子可分别表示为
2.3 定接收机自主完好性监测(RAIM)可用性
RAIM可用性是RAIM算法的一个方面,主要用来判断导航解是否满足实际应用的需要。在民航应用中,RAIM可用性判断需要根据不同航路性能指标对可见星的几何分布进行判定,在保证定位解算中卫星数目大于等于5时方能进行故障检测[8-11]。故障检测之前需要判定卫星的几何构型是否满足故障检测的最大漏检概率需求,然后利用水平/垂直保护等级给出可用性判定。
水平保护门限HPL的计算公式[12-15]为

垂直保护门限VPL的计算公式为

其中:σ为用户等效误差的标准差;λ为非中心χ2(n-4)的非中心参数;HSlope(i)为第i颗卫星的特征斜率值;M1i、M2i和M3i分别为矩阵M第1行第i列元素、第2行第i列元素和第3行第i列元素。计算公式为
在不同航路,通过比较保护门限HPL、VPL和告警门限HAL、VAL的大小来判定RAIM可用性。若BOOL(HPL<HAL且VPL<VAL)为真,则判定该点可用;反之不可用。在此基础上评估单点可用性百分比[16],算法表达式如下
其中:tstart、tend和T分别表示测试数据的起始时刻、结束时刻和采样间隔。
2.4 服务连续性
定位连续性是指发生定位精度超标的概率[15],一般来说需要在水平和垂直方向上直接将定位误差与相应的门阀比较。RAIM可用服务连续性是指满足RAIM可用性,在水平和垂直保护门限均未超过告警门阀值的连续时间百分比,通常使用水平和垂直保护门限两个方面直接与相应的门阀比较进行判断。本文采用航路各阶段告警门限(HAL、VAL)来代替相应的门阀值。连续性时间百分比计算公式如下[16]

其中:wind为滑动窗口的长度,一般取1 h[15]。此时,PCOA为每小时定位精度持续满足要求的百分比。
3 数据处理结果分析
测试设备使用北斗星通BDM670北斗/GPS/GLO三系统七频接收机:选择仅北斗系统B1频点定位;卫星截止高度角为5°;采样间隔为5 s;观测日期为2015-08-03—2015-09-30;测试分析数据日期为2015-09-07—2015-09-13;UTC观测时间为2015-09-07T 02:40:58—2015-09-13T 02:40:53;处理点为每天17 280个。接收机天线位于天津市中国民航大学北院北12楼2楼楼顶。由于数据量较大,为了便于使Matlab进行图形处理完成仿真验证,仅选取日期为2015-09-09的前2 000个点,即00:00:00—02:46:40的数据进行作图分析。
3.1 北斗卫星导航系统定位精度评估
定位精度评估由于没有真实位置作为依据,采用内符合评估方法作为参考[14]。采集了上述近两个月时间的定位结果,并对定位结果求均值近似作为真实位置。
利用Matlab软件平台对数据进行仿真分析,结果如下面的图形所示:图1表示水平方向上圆概率误差在95%概率条件下的点分布,结果表明水平误差为8.981 0 m;从图2可以看出,在3个方向上的误差变化趋势大致相同,东向上的精度优于其他两个方向。为了更加清晰地展示2015-09-09这天的误差分布,分别在三维坐标空间的两个平面内作投影,如图3所示,结果表明在东向上误差优于6 m,天向优于14 m,北向优于10 m。
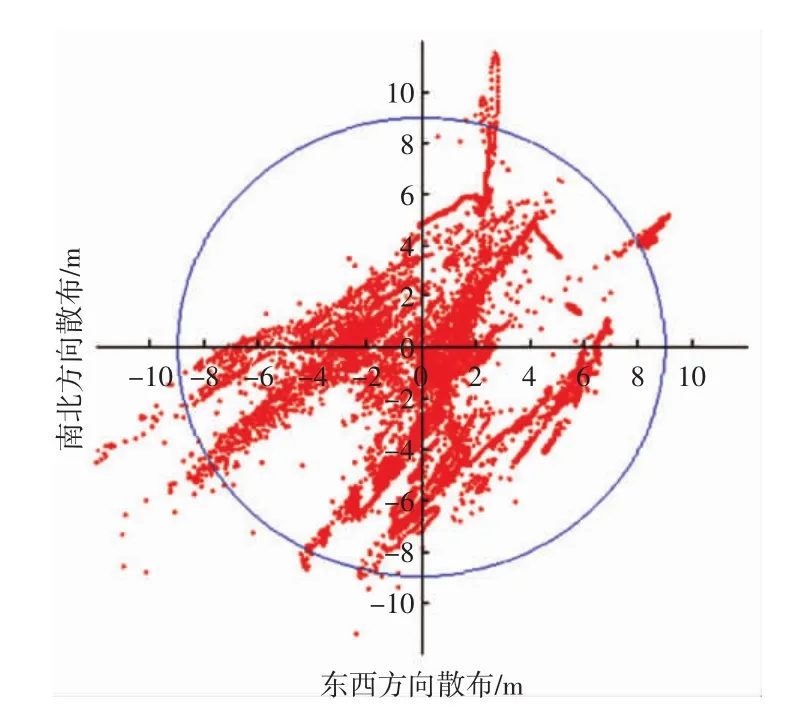
图1 圆概率水平误差分布Fig.1 Distribution of CEP horizontal error

图22 DRMS误差趋势Fig.2 Trend of 2DRMS error
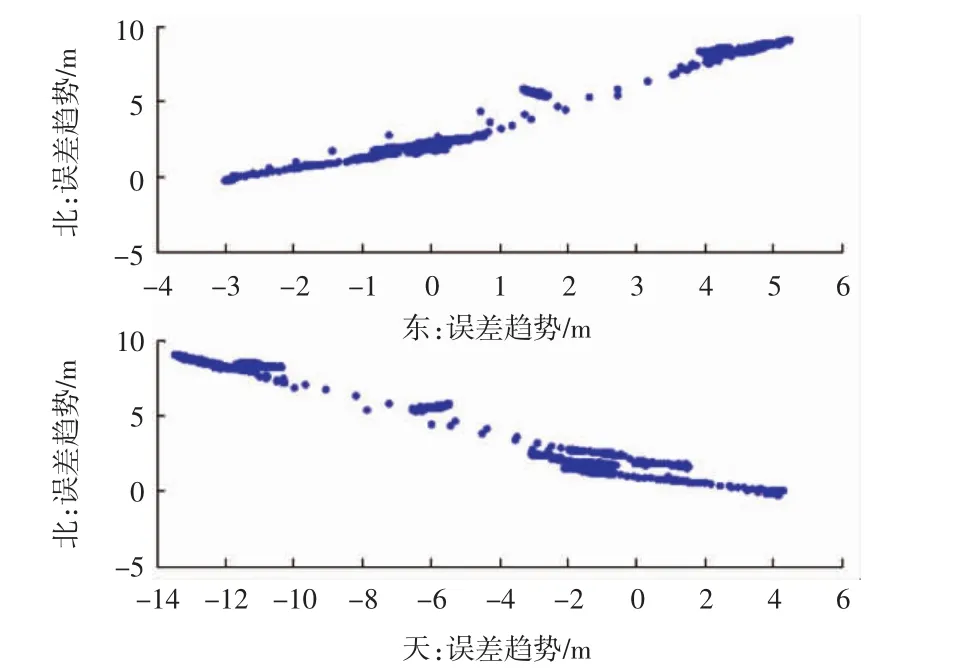
图32 DRMS平面误差投影Fig.3 2DRMS plane error projection
连续7天的圆概率误差和2DRMS误差的统计如表1所示,结果表明在95%概率条件下,CEP精度和2DRMS水平精度大致相同;三维定位精度优于20 m,水平精度优于15 m,垂直精度优于20 m。
3.2 可见星数目与PDOP值分析
图4给出了可视卫星数目与位置精度因子PDOP之间的对应关系,可明显看出可见星数目增加,相应的PDOP减小;可见星数目减少,PDOP变大,并且是一种突变的关系;在可见星数目保持不变的条件下,PDOP基本不变。
3.3 RAIM可用性和连续性分析
按照式(9)和式(10)计算观测历元时刻的HPL和VPL,统计结果如图5所示。然后,与ICAO规定的SIS具体指标不同飞行阶段水平和垂直告警门限相比,统计RAIM可用性百分比和连续性百分比(采样点来自一天的数据,在Matlab中消除了一些不可用的非数,所以采样点小于一天的17 280个历元),如图6所示。统计结果表明,北斗区域导航系统定位精度满足非精密进近NAP飞行阶段的导航性能要求,但两类垂直引导APV1、APV2及精密进近CAT1阶段无法满足要求。日期为2015-09-07—2015-09-13的统计结果如表2所示。
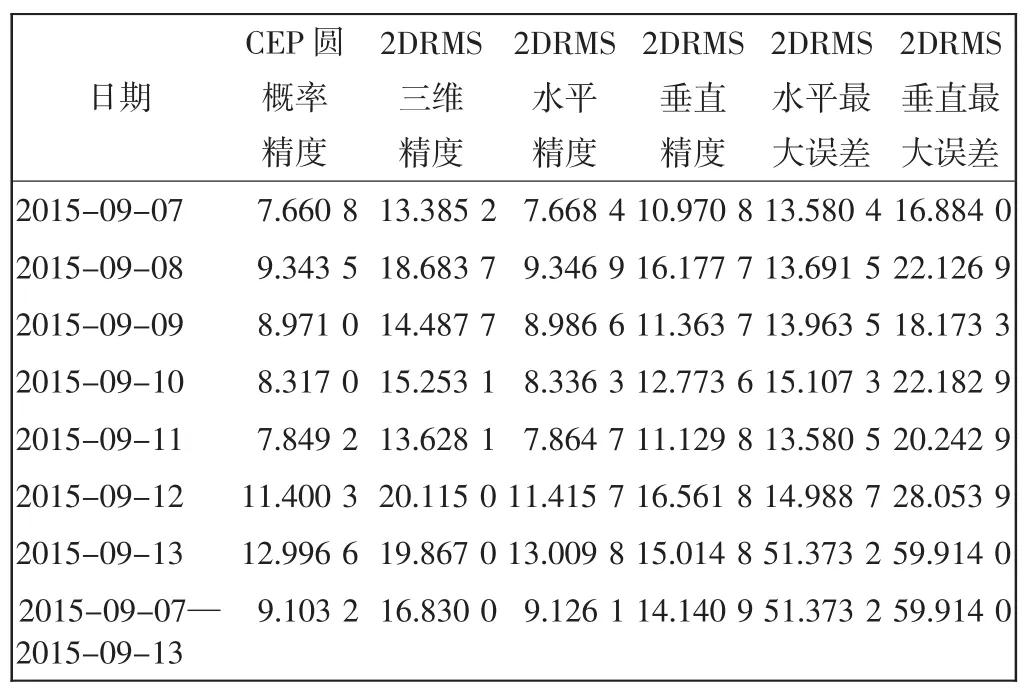
表1 一周时间内误差统计(95%概率)Tab.1 Statistic value of error within one week(95%probability)
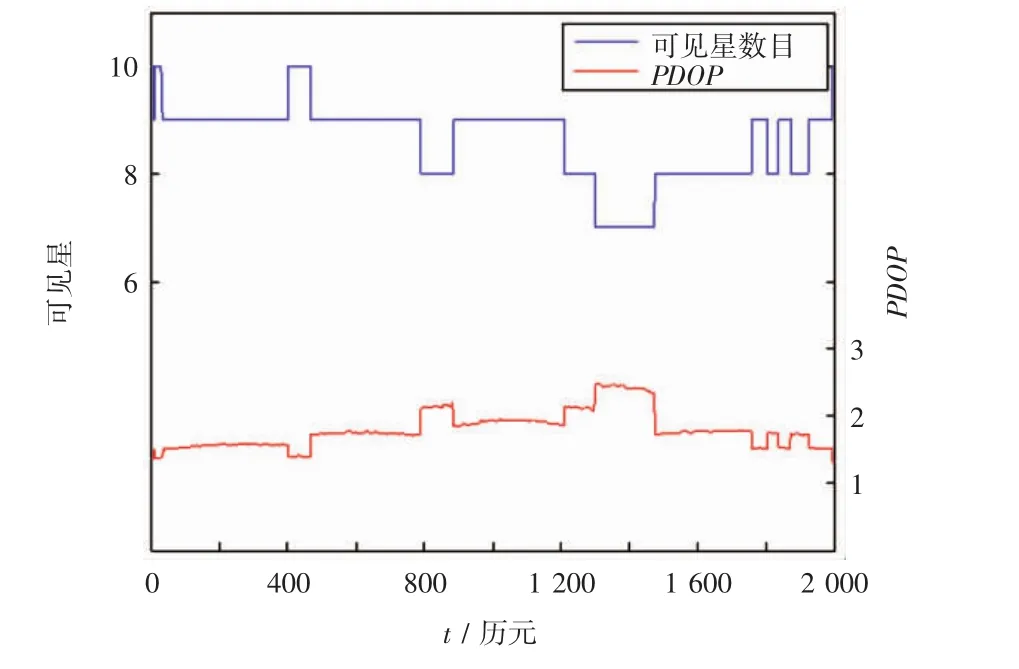
图4 可见卫星与PDOP对应关系Fig.4 Correspondence between visible satellites and PDOP
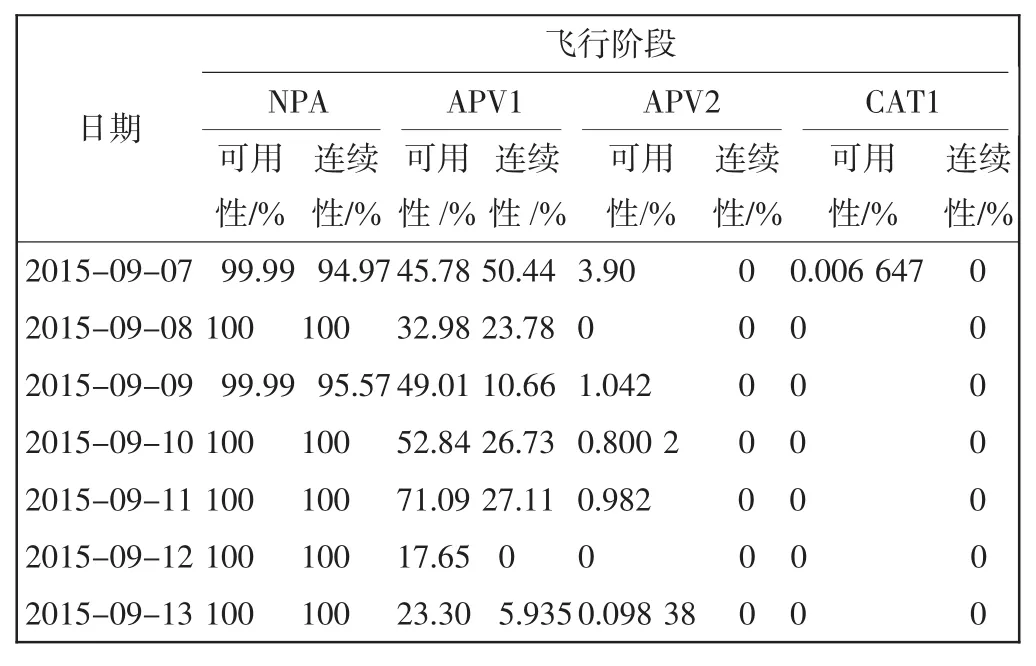
表2 RAIM可用性与连续性统计Tab.2 Statistical RAIM values of availability and continuity
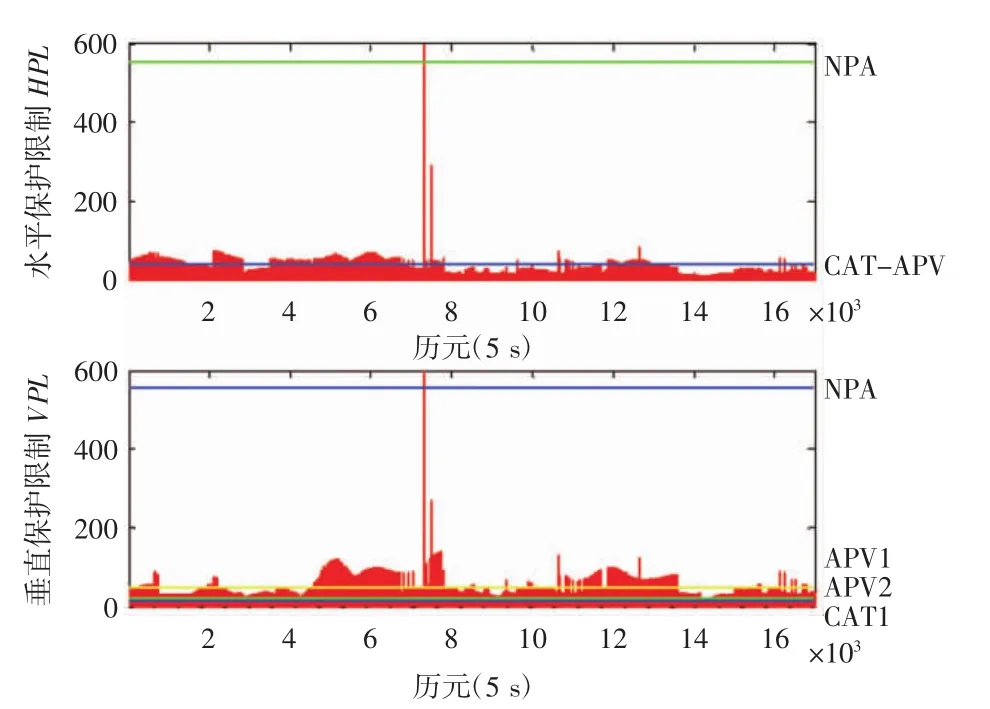
图5 HPL/VPL时序变化值Fig.5 Value of HPL/VPL time sequence variation
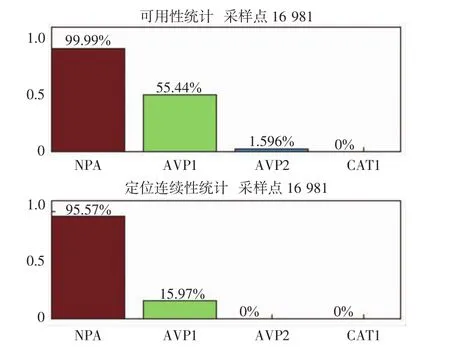
图6 RAIM可用性与连续性统计Fig.6 Statistical values of RAIM availability and continuity
4 结语
本文详细阐述了卫星导航系统服务性能评估的指标及其经典评估方法。利用Matlab软件并结合目前北斗星座下实际接收的数据,实现了对北斗区域单点定位服务精度、可见星数目变化、DOP值变化以及他们之间变化关系的评估,统计分析了测点接收机自主完好性监测可用性和连续性时间百分比,为北斗一般用户和北斗民航应用提供了参考依据。具体结果如下:
1)可见星数目大于7颗,PDOP值小于3,能够满足定位基本要求;
2)测点在95%置信概率条件下,三维定位精度优于20 m,水平精度优于15 m,垂直精度优于20 m;
3)该服务精度可满足飞行非精密进近NAP阶段导航性能要求,但在两类垂直引导APV1、APV2及精密进近CAT1阶段无法满足导航性能需求。
[1]帅 平,曲广吉,陈忠贵.卫星导航系统性能指标与评估方法[C]//中国自动化学会空间及运动体控制专业委员会.全国第十二届空间及运动体控制技术学术会议论文集.北京,2006.
[2]韩 虹,张立新.卫星导航系统的导航性能及信号完好性监测方法[J].空间电子技术,2007(4):7-11,53.
[3]张 乐,李武周,巨养锋,等.基于圆概率误差的定位精度评定办法[J].指挥控制与仿真,2013,35(1):111-114.
[4]中国卫星管理办公室(CSNO).北斗卫星导航系统空间信号接口控制文件(ICD)[S].2版,2013.
[5]王惠南.GPS导航原理与应用[M].北京:科学出版社,2003.
[6]魏子呻,葛茂荣.GPS相对定位的数学模型[M].北京:测绘出版社, 1998.
[7]杨开伟,黄劲松.卫星导航系统定位精度评估[J].海洋测绘,2009(4): 26-28.
[8]徐肖豪,杨传森,刘瑞华.GNSS用户端自主完好性监测研究综述[J].航空学报,2013,34(3):451-463.
[9]HELMUT BLOMENHOFER,WALTER EHRET.GNSS/Galileo Global and Regional Integrity Performance Analysis[C]//The European Navigation Conference-GNSS,Munich,2005.
[10]DURAND J M,CASEAU A.GPS availability,PartⅡ:Evaluation of state probabilities for 21 satellite and 24 satellite constellations[J].Navigation,1990,37(3):285-297.
[11]BLOMENHOFER H,BLOMENHOFER E,EHRET W.Performance Analysis of GNSS Global and Regional Integrity Concepts[C]//ION GPS, Portland,2003.
[12]李 飞,段哲民,龚 诚.GPS接收机自主完好性监视算法研究及仿真[J].测绘科学,2009,34(1):136-137,232.
[13]陈 婷,佀 荣,史彦芳.GNSS接收机自主完好性监测算法研究[J].电子设计工程,2013,21(2):97-99.
[14]李作虎.卫星导航系统性能监测及评估方法研究[D].郑州:解放军信息工程大学,2012.
[15]胡志刚.北斗卫星导航系统性能评估理论与试验验证[D].武汉:武汉大学,2013.
[16]杨 青,张 锋,李 超,等.北斗系统B1频点定位性能评估[J].测绘科学技术学报,2013,30(6):586-588,592.
(责任编辑:杨媛媛)
Single point service test and analysis of BeiDou regional navigation satellite system
LIU Ruihua,CHEN Yingchao,KONG Yueming,YIN Haoyuan
(College of Electronic Information and Automation,CAUC,Tianjin 300300,China)
The basic performance indicators and evaluation methods of satellite navigation system are introduced.Pointmeasuring accuracy is analyzed based on CEP and 2DRMS.Change relationship between DOP and number of visible SV is analyzed with actual measurement data.Different flight phase availability and time percentage of service continuity of receiver autonomous integrity monitoring are counted and analyzed at the measuring point.Experimental data analysis shows that the number of SV is greater than 7,which can meet the requirement for SV number in user positioning process.Under the condition of 95%probability,the 3D positioning accuracy is better than 20 m,the horizontal accuracy is better than 15 m,the vertical precision is better than 20 m,this service precision satisfies the requirements of navigation performance of NPA flight phase.
BeiDou regional navigation system;positioning accuracy;receiver autonomous monitoring;system availability;system continuity
TN967.1
A
1674-5590(2017)02-0011-05
2016-05-24;
2016-09-10
民航安全能力建设项目(AADSA0007);中央高校基本科研业务费专项(20001006);中电科54所新技术研究高校合作项目(KX14260033)
刘瑞华(1965—),男,陕西蓝田人,教授,博士,研究方向为卫星导航、惯性导航和组合导航.
