短波红外相机响应非均匀性校正方法研究及仿真
2017-06-01崔磊刘智
崔磊,刘智
(长春理工大学 电子信息工程学院,长春 130022)
短波红外相机响应非均匀性校正方法研究及仿真
崔磊,刘智
(长春理工大学 电子信息工程学院,长春 130022)
介绍短波红外相机非均匀性校正的两种基本方法,两点校正法以及多点校正法,同时提出改进算法即定标和场景融合的校正算法。此方法能够自适应克服红外焦平面阵列探测单元的响应漂移现象,克服外界环境改变带来的校正误差,实现短波红外相机在工作时间延长和多变环境情况下的高精度实时非均匀性校正,且不需要重新定标,方法简单,效果明显。采用像元数为320×256的红外焦平面阵列进行红外相机非均匀性实时校正实验,并将三种方法用MATLAB软件分别进行仿真,实验结果达到预期目的,校正效果良好。
红外焦平面阵列;探测单元;增益;偏移量
短波红外成像技术可提供可见光、微光夜视、中波、长波红外成像所不能提供的信息,对于在红外波段获取完整目标信息具有重要意义,所以短波红外相机的应用前景是无可估量的[1]。它既可用于红外焦平面夜视,红外成像制导及光电对抗等军事领域,又可应用在红外天文学、医疗、交通、公安等生活领域,军民两用,适用范围十分广泛[2]。由于受材料、环境以及工艺水平的影响,红外焦平面阵列响应非均匀性比较大,制约红外系统探测性能,难以达到实用要求[3]。当短波红外相机进行激光测量时,其非均匀性校正便变得格外重要。良好的均匀性会让测试结果更精准,更贴合实际。因此,对红外图像进行实时非均匀性校正,以便获取精准图像已成为红外成像技术应用领域中势不可挡的趋势[4]。
本文介绍两点校正法、多点校正法,在此基础上提出定标和场景融合的校正新算法,并利用MATLAB软件实现红外图像非均匀性实时校正的过程。
1 非均匀性校正的基本方法
1.1 两点校正法
两点校正法是较早用于红外成像系统进行校正的一种方法,并且也是目前最为成熟的方法之一[5]。
两点校正法建立在如下2个假设条件情况下:
(1)每个探测单元的响应是线性的;
(2)探测单元的响应必须具有时间的稳定性,否则定标数据在使用时就会失去意义[6]。在此条件下,红外焦平面阵列在均匀辐射背景下任一像元的响应输出为:

式中,Xij(φ)为探测元的响应输出值;φ为辐射通量;Mij和Nij为焦平面阵列第i行第 j列探测元的增益和偏移量。因此,采用此方法得到非均匀性校正公式为:

式中,Kij和Bij分别为两点校正中的校正增益和校正偏移量;Xij(φ)为校正前的探测单元响应值,Yij(φ)为校正后的输出值。
两点校正即是特定条件光源均匀照射红外图像传感器,通过各阵列元对不同辐射通量的响应计算出Kij和Bij从而实现非均匀性校正。将所有阵列元在辐射通量下的响应分别归一化为 Xn(φ1)和Xn(φ2)。

则校正增益和校正偏移量可通过下式(4)计算出:
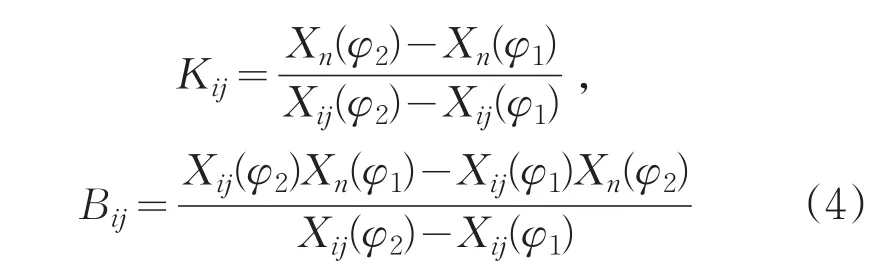
其中,Xij(φ1)和Xij(φ2)分别为像元(i,j)在辐射通量φ1、φ2背景下的响应。再根据公式(2),即可实现两点校正。
1.2 多点校正法
欢迎李峤汝重新回到郑州的午宴安排在河南饭店。河南饭店现在虽说只剩个虚名,毕竟还挂着河南两个字。愧疚,补偿,总得有个表达的形式,苏楠理解姥姥他们的心理。饭桌上,姥姥不时絮叨出一些苏楠她们根本就没有记忆的往事。苏楠和李峤汝都很配合,两个人头还凑到一起自拍了张照片。李峤汝传到微信上,配的文字是,3 0多年前的亲姐妹。苏楠不甘落后,在下面回复纠正,3 0多年后也是亲姐妹。
两点校正法建立在红外焦平面阵列探测单元响应是线性假设条件下,这种假设是理想化的,实际情况并非如此[7]。对于要求较高的应用场合,即可采用多点校正法来降低非线性带来的误差,即分段采用两点校正法,如下图1所示:
根据两点校正公式的推导过程可得到多点校正的k-1段线性区间内的校正系数为:
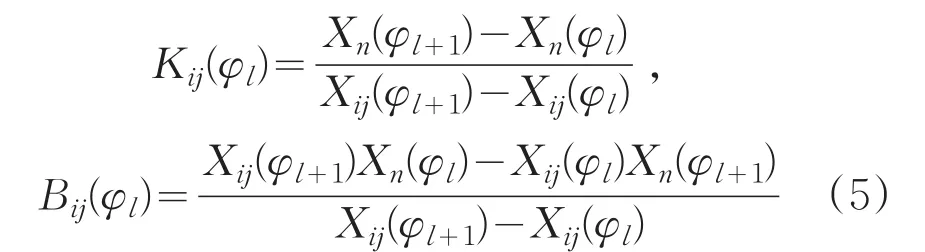
则:

式中,Kij(φl)和Bij(φl)分别为多点校正中第l个区间内的校正增益和校正偏移量,Xij(φ)为探测元响应表输入值,Yij(φ)为校正后输出值。
2 非均匀性校正的改进算法
前面介绍了两种常用的非均匀性校正算法,算法结构简单,实时性强,但随着工作时间的延长和环境的复杂多变,焦平面阵列各探测单元的响应会发生缓慢漂移,这就会给定标类算法带来新的校正误差。而场景类校正算法不需要定标,能够自适应跟随探测单元的响应漂移,但算法量大,难以实时实现。在此提出一种新方法,即定标和场景融合校正方法。此法结合定标类算法实时性强特点和场景类算法自适应跟踪漂移特点,可实现红外焦平面阵列在长时间工作和复杂环境条件下的高精度实时非均匀性校正。
定标和场景融合校正方法将多点定标和场景算法相结合,通过相关系数来修正非均匀性偏移参数,从而实现红外场景图像的自适应非均匀性校正。实现过程如图2所示。
由多点校正通用公式可知红外焦平面阵列非均匀性校正表达式如下:

式中,系数Kij(φl)和Bij(φl)表达式分别为


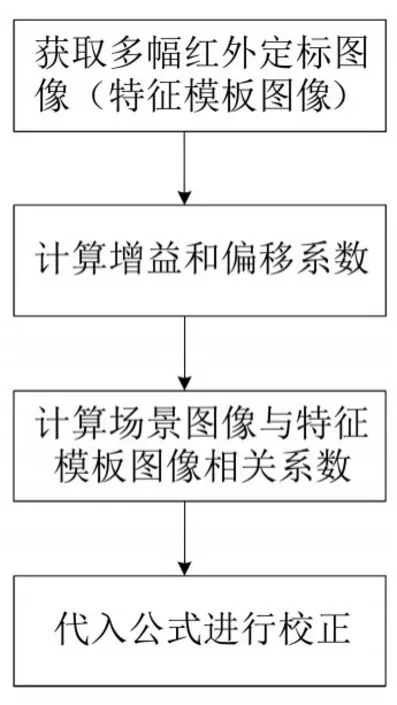
图2 定标和场景融合校正算法实现流程图
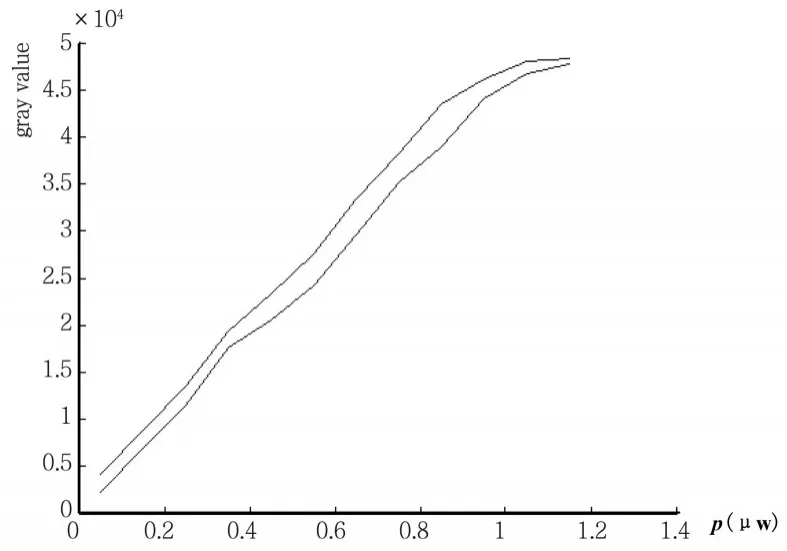
图3 红外焦平面阵列各探测元响应漂移图
如图3所示,横坐标表示功率,纵坐标表示红外焦平面阵列探测元响应输出值。由图可知,当外界环境变化时,探测单元的偏移系数漂移较大,增益系数漂移较小。因此,可通过消除非均匀性校正偏移系数漂移来减少非均匀性校正误差。校正过程中所使用的红外特征模板图像在实验室环境条件下获取,红外场景图可在外场环境下或实验室环境变化时获取。在相同辐射通量下,红外特征模板图像跟场景图像之间存在一定漂移现象并且具有一定相关性。相关系数P的表达式为:式中,Xij和分别表示场景图像及其均值;Vij(φl)和(φl)分别表示特征模板图像及其均值。
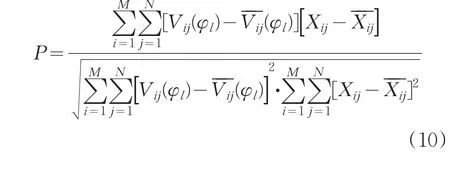
在此基础上,再结合多点校正公式即得到定标和场景融合校正算法公式为:

式中,Kij和Bij分别表示为探测单元的增益和偏移系数;P为场景图像与特征模板图像的相关系数,RBij表示修正后的偏移系数;Xij和Yij分别表示非均匀性校正前后的红外场景图像。
3 仿真与结果分析
3.1 两点校正法
红外焦平面阵列探测元的响应输出随激光器功率变化趋势如下:

图4 红外焦平面阵列各探测单元响应曲线图
图4横坐标为激光器功率 p,纵坐标为各探测单元响应输出值。根据图4,可以选取不同的 p1,p2作为定标点对图像进行校正,但校正结果会随p1,p2的变化受到影响。
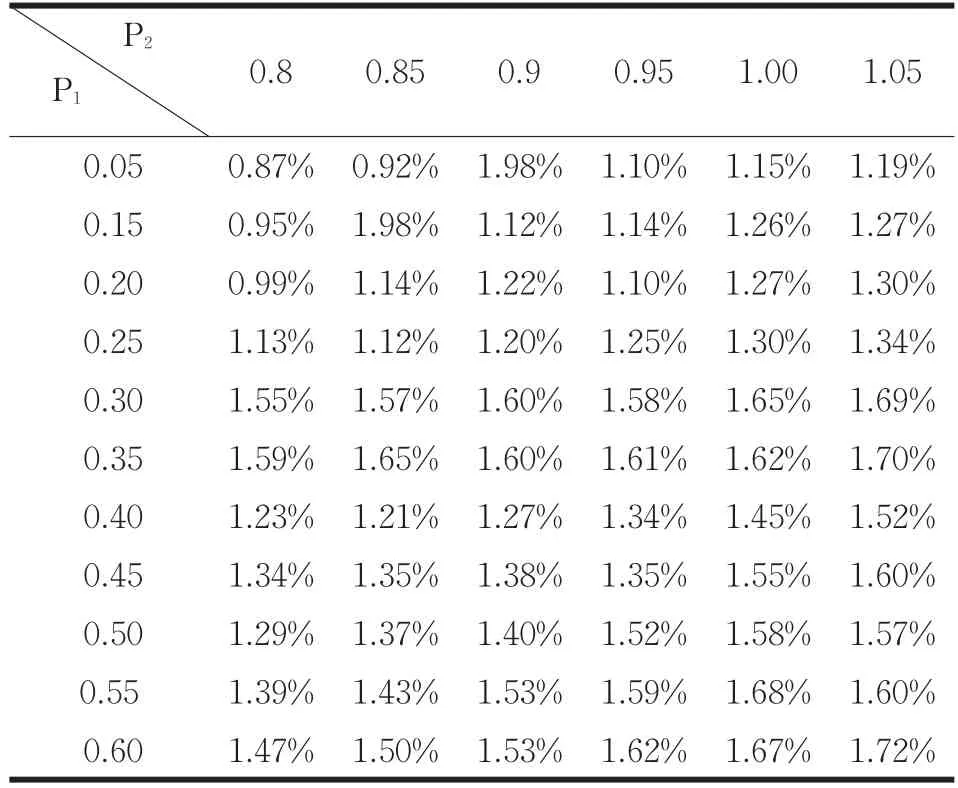
表1 不同p1,p2校正0.1μW条件下图片的非均匀性NU计算结果
由表1可知:环境温度26℃,积分时间2ms,p1=0.05μW,p2=0.8μW时,非均匀性达到最小为0.87%。此时,图5为功率为0.1μW条件下未校正的图片,图6为采用两点校正法校正的图片:
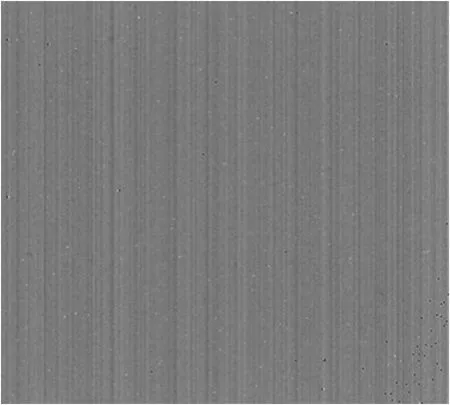
图5 未校正的图片

图6 两点法校正后的图片
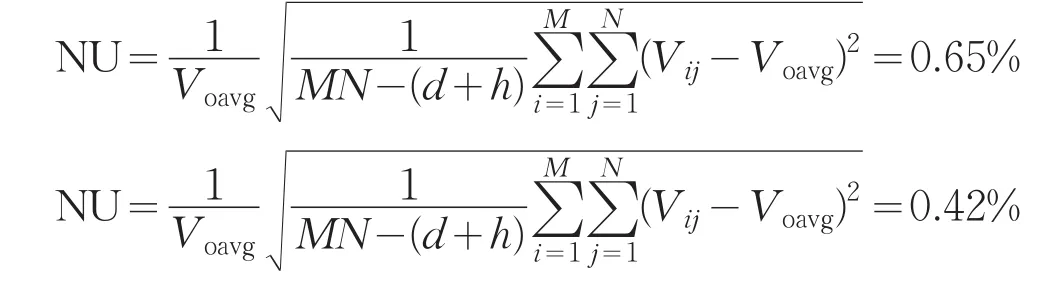
下面计算上图中图像校正前后的非均匀性。原始图像(4)非均匀性:
两点校正后的图像(5)非均匀性:
图7为激光器功率0.01μW条件下两点法校正前后三维空间对比结果,图中,水平面代表阵列为320*256的红外焦平面阵列,纵坐标代表各个探测单元响应灰度值。
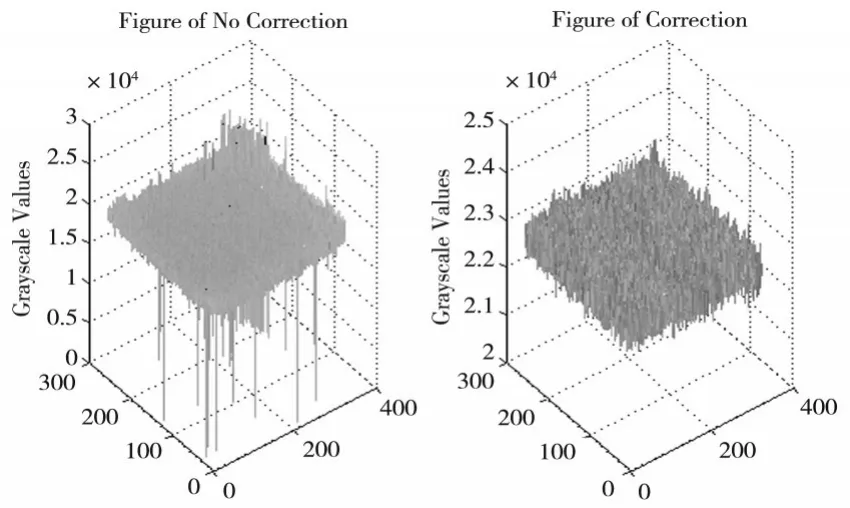
图7 两点法校正前后三维空间对比图
由上述计算结果可以得到:两点校正后图片非均匀性显著下降,达到实验目的。
3.2 多点校正法
根据线性趋势将图像以0.1μW为间隔将区间划分多段,每段均按照两点法进行校正。实验环境不变。图8为采用多点校正法后得到的功率为0.1μW条件下的校正图片:

图8 多点法校正后的图片
多点校正后的图(7)非均匀性:
图9为激光器功率0.45μW条件下多点法校正前后三维空间对比结果:
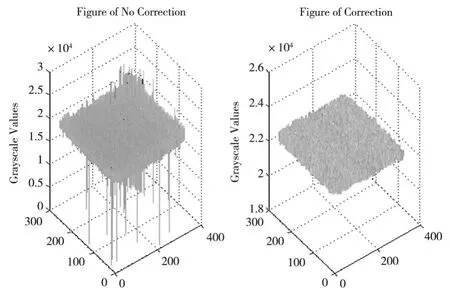
图9 多点法校正前后三维空间对比图
由上述计算结果可以得到:多点校正后图片非均匀性优于两点校正,效果显著,达到实验目的。
3.3 定标与场景融合新算法
对红外场景图像分别进行多点校正以及定标与场景融合校正方法校正,当积分时间2ms,功率为0.45W条件下仿真结果分别如下图10、图11:

图10 原始多点法校正后的图片

图11 改进算法校正后的图片
运用多点校正法以及定标与场景融合校正方法校正后图像的非均匀性分别为:
三维空间对比结果如图12所示:
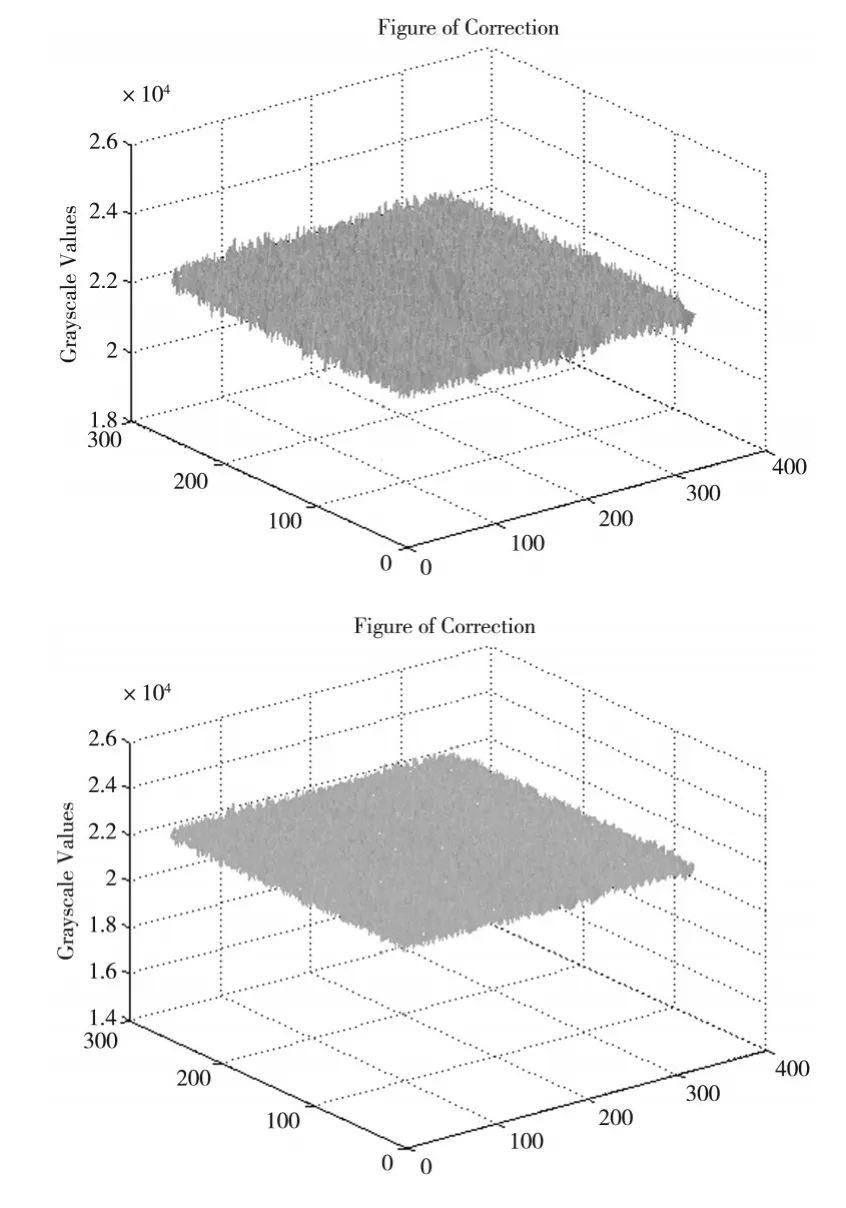
图12 原始多点法及改进算法校正后三维空间对比图
由图12可看出,定标与场景融合新算法明显好于原始多点校正法。
4 结论
实验结果表明,短波红外相机采集的图像经两点校正法及多点校正法校正之后具有非均匀性显著下降,校正过程简单,处理速度快的优点,能够有效地解决红外成像技术中实时性难题。定标和场景融合方法既结合了定标类算法实时性强的特点以及场景类算法自适应跟踪漂移特点,又能够实现红外焦平面阵列在长时间工作和复杂环境下的高精度实时非均匀性校正。仿真结果表明,定标和场景融合校正算法具有较强的环境适应性能,且校正效果良好。
[1]菜毅,胡旭.短波红外成像技术及其军事应用[J].红外与激光工程学报,2006,35(6):643-647.
[2]张辉,赵保军,唐林波,等.基于自适应多特征整合的红外目标跟踪[J].光学学报,2010,30(5):1291-1296.
[3]熊辉,杨卫平,沈振康.红外焦平面阵列非均匀性校正算法研究[J].系统工程与电子技术,1998(12):40-43.
[4]胡晓梅.红外焦平面探测器的非均匀性与校准方法研究[J].红外与激光工程,1999,28(3):9-12.
[5]Kumar A,Sarkar S,Agarwal R P.A novel algorithm and FPGA based adaptable Architecture for correcting sensor non-uniformities in infrared system[J].Micro⁃processors and Microsystems,2007,31(6):403-404.
[6]陈宝国,郑志伟,黄士科.利用FPGA实现红外焦平面器件的非均匀性校正[J].红外与激光工程,2000,29(4):55-57.
[7]吴传玺,代少升.基于DSP的红外成像系统与盲元处理算法设计[J].电视技术,2011,35(3):25-28.
Research and Simulation of Non Uniformity
Correction Method for Short Wave Infrared Camera
CUI Lei,LIU Zhi
(School of Electronics and Information Engineering,Changchun University of Science and Technology,Changchun 130022)
In this paper,two basic methods of nonuniformity correction of short wave infrared camera are introduced,including two-point correction method and multiple point correction method.At the same time,an improved algorithm is proposed,which is the correction algorithm of calibration and scene fusion.The response drift of the infrared focal plane array detector can be over⁃come.To overcome the correction error caused by the change of the external environment,high precision real time nonuniformity correction of short wave infrared camera in working time and changeable environment can be realized.And the standard need not to be reset,the method is simple,the effect is obvious.Nonuniformity real-time calibration experiment is adopted in infrared cam⁃era using infrared focal plane array with pixel number 320×256.And the three methods are simulated by MATLAB software,the experimental results showed that the desired objectives is achieved and the correction effect is good.
infrared focal plane array;detection unit;gain;offset
TN21
A
1672-9870(2017)02-0106-05
2016-12-19
崔磊(1991-),女,硕士研究生,E-mail:642619776@qq.com
刘智(1971-),男,博士,教授,博士生导师,E-mail:2311547@qq.com