模块化协作机器人运动特性分析及动力学仿真研究
2017-06-01马国庆刘丽于正林曹国华
马国庆,刘丽,于正林,曹国华
(长春理工大学 机电工程学院,长春 130022)
模块化协作机器人运动特性分析及动力学仿真研究
马国庆,刘丽,于正林,曹国华
(长春理工大学 机电工程学院,长春 130022)
针对UR10模块化协作机器人的构型特点,采用D-H坐标变换法建立其运动学坐标系,采用逆变换法对机器人进行逆运动学求解,求得各个关节转角。运用拉格朗日法对UR机器人进行动力学分析,利用ADAMS多体动力学仿真软件对其进行动力学仿真。结果证明,该模块化协作机器人具有良好的静态平衡性能、运动稳定性和动态响应特性。
模块化协作机器人;运动特性分析;动力学仿真
随着科技的进步,人机协作机器人技术得到了飞速的发展,特别是机器人十三五产业规划的出台,已将模块化协作机器人作为一个重点发展领域。模块化机器人的研究可追溯到1988年卡纳基梅隆大学推出的模块化机械手系统(RMMS),RMMS不仅实现了机械结构的可重构,而且实现了控制算法、电子软硬件的可重构[1]。德宇航中心(DLR)为了增强机器人的空间操作的灵活性,采用完全模块化的设计思想设计了具有7个自由度的第三代轻型臂,它的驱动部分采用了经过DLR优化设计的高性能ROBO Drive电机,该电机的重量和功耗只有商业电机的一半,最大关节速度约10deg/sec[2]。丹麦UR机器人公司采用直流电机带动谐波减速器的传动方式进行运动,关节外壳采用铝质材料大大减轻了机器人的重量,并且每个关节采用中空轴布线的方式,避免了由于关节的高速运转而产生的电缆缠绕。UR机器人具有力反馈功能,通过测量关节中的电流来控制力量和动作,一旦发生碰撞,机器人就自动停止工作。因此在大多数应用中都无需安全围栏,是协作机器人的典范[3]。国内方面哈尔滨工业大学推出的模块化5自由度服务型机器人手臂,可实现大臂的摆动和回转、小臂回转、肘关节的摆动和末端手爪的张合[4]。北京遨博智能作为国内协作机器人的黑马,研制的i5人机安全协作机器人,具有先进的力控功能,能与操作者近距离协同作业,目前已进入批量化生产阶段[5]。
本文以UR10机器人为研究对象,首先采用DH坐标变换法建立机器人的连杆坐标系,进而采用逆变换法对机器人进行逆运动学求解,求得各个关键转角。运用拉格朗日法对UR机器人进行动力学分析,利用ADAMS多体动力学仿真软件对其进行动力学仿真,验证所推导动力学模型的正确性。
1 运动学求解
运动学的求解过程并不考虑各杆件之间的相互作用力,只研究其运动的关系。正运动学问题是在已知各关节角及杆件尺寸的基础上,求解末端执行器在基坐标系下的位姿,其实质是运动学方程式的建立和求解。逆运动学问题是在已知杆件的几何参数和末端执行器相对于基坐标系的期望位姿,求取机器人末端执行器达到此位姿时各关节角度值。
1.1 连杆坐标系建立
UR10是一款具有6个旋转关节的串联机器人,为清晰地表明该机器人各连杆之间的位姿关系,可采用D-H坐标变换法[6]进行建模,步骤如下:(1)建立基坐标系x0y0z0并确定初始位姿;(2)根据D-H坐标原则建立其余关节坐标系;(3)机器人工具坐标系为x6y6z6;机器人D-H坐标系如图1所示。
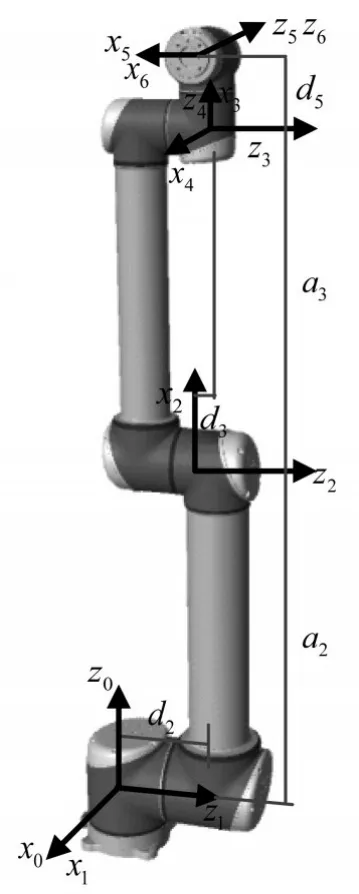
图1 UR10机器人D-H坐标系
1.2 正运动学求解
建立各关节坐标系之后,根据相邻关节坐标系间的转换关系,可确定关节和连杆的D-H参数,UR10机器人的各个关节均为转动关节,所以只有关节角θ是变量,关节扭角α、连杆长度a、连杆距离d均为固定值,UR机器人的D-H参数如表1所示。
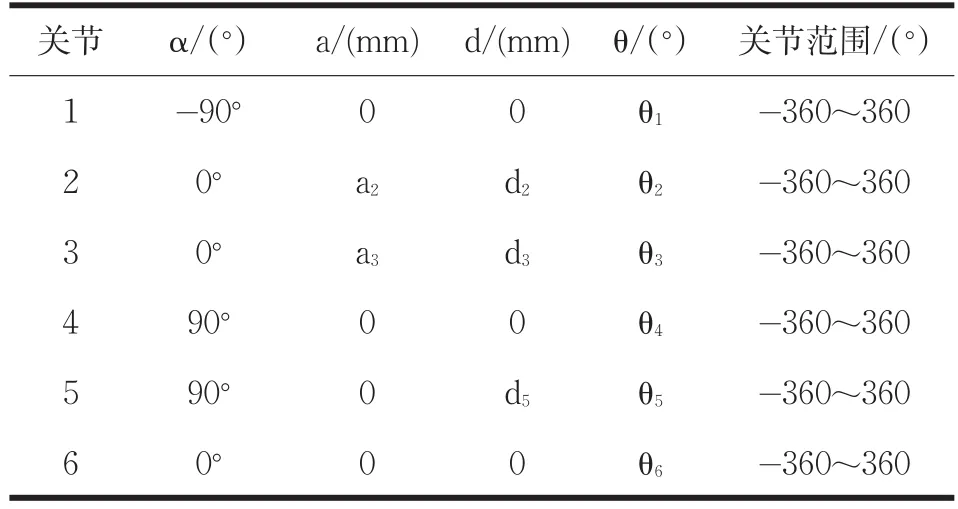
表1UR10机器人D-H参数表
机器人相邻关节坐标系间转换矩阵如式(1)示。i-1Ti=Rot(z,θi)×Trans(0,0,di)×Trans(ai,0,0)×Rot(x,αi)

将表1中D-H参数代入式(1),得到相邻关节坐标系间的转换矩阵,再将得到的变换矩阵依次相乘,即可求得UR机器人的运动学正解如式(2)所示。(ci=cosθi,si=sinθi,cijk=cos(θi+θj+θk),sijk= sin(θi+θj+θk)i=1…6,j=1…6,k=1…6,下同)。

1.3 逆运动学求解
根据UR10机器人的构型特点可知,该机器人的第二、三、四关节轴平行,满足三个相邻关节轴平行或者相较于一点这个条件,所以UR机器人运动学的逆解存在。
(1)求解θ1
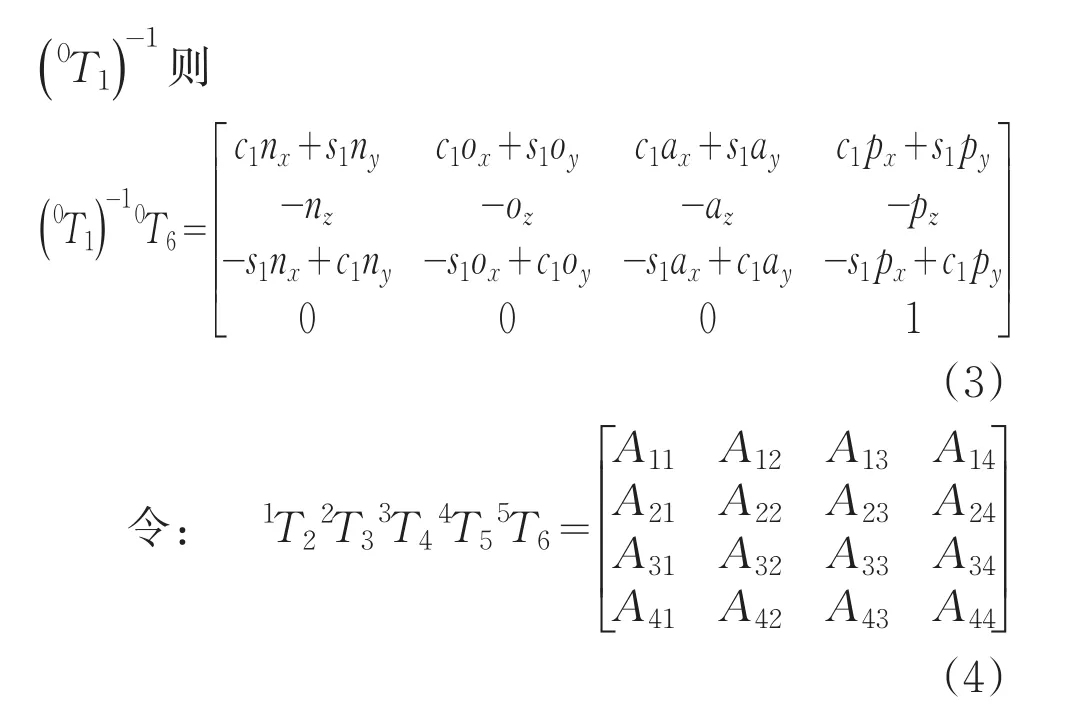
取其中第3行的转置
式(3)和式(4)矩阵第3行第4列对应相等,得

将上述方程作如下三角代换

(2)求解θ5
式(3)和式(4)矩阵的第3行第3列及第3行第3列分别对应相等,得

(3)求解θ6
式(3)和式(4)矩阵的第3行第1列及第3行第1列分别对应相等,得

(4)求解θ2
其第2列、第3列和第4列元素分别为:

可得

(5)求解θ3
式(8)和式(9)矩阵的第2行第3列及第2行第4列分别对应相等,得
(6)求解θ4

1.4 解的对应关系
在理论上通过逆解可得到机器人的8组关节角度值,但在实际的控制系统中,由于杆件间存在物理干涉以及运动连续性的要求,往往只存在一组最优的可行解。采用最短行程原则进行择优,其算法流程如图2所示,θcm表示机器人当前第m关节坐标,θnm表示机器人逆解第n组第m关节坐标,其中n=1,2,…8;m=1,2,…6。

图2 最短行程原则算法流程图
2 模块化机器人动力学方程的建立
研究机器人动力学的方法很多,主要有牛顿-欧拉法(Newton-Euler)、拉格朗日法(Lan-grange)、高斯(Gauss)法、凯恩(Kane)法及罗伯逊-魏登堡(Robson-Wittenburg)法等。本文采用常用的拉格朗日方法来建立该机器人的动力学方程。
随着掌声的响起,我们班的总结会和颁奖结束了,但兴奋和感动却永远留在了大家心间,温暖着彼此的心,激励着大家不断前进。
机器人的拉格朗日方程为
式中,qi,是系统的广义坐标和广义速度;Qi为对应广义坐标的广义力。
设机器人的第i关节质心在基础坐标系中的平移速度向量为vci、角速度向量为ωi、质量为mi、相对质心的惯性张量为Ii,则第i关节的动能为

其中,第一项为平移运动时物体的动能,第二项为绕质心旋转时物体的动能。
第i关节在基础坐标系中的速度与第i关节以及之前各关节速度之间的关系可以表示为


其中,Mij是n阶方阵M的元素,
因为关节为转动关节,所以机器人的总动能为
其中,g为基础坐标系下的重力加速度向量,OPci为基础坐标系中由坐标原点到杆i质心的向量。

其中,τ和F分别表示关节力向量和末端执行器与外界环境的接触力向量。
将机器人的动能、势能和广义力代入拉格朗日方程,可得机器人动力学方程
通过上式可以看出利用理论推导求解机器人的动力学方程的计算比较复杂,所以一般采用多体动力学仿真的方法来完成机器人各关节的力或力矩的求解。
3基于ADAMS机器人动力学仿真平台建立
3.1 仿真平台的前处理
导入模型前,需要设置工作环境,首先对单位进行设置,选择系统默认状态下的坐标系为地面坐标系,其次按照正确的装配关系设置重力的方向。在Solidworks中建立好UR机器人的三维模型后,要将此模型导入到ADAMS的前处理器ADAMS/View中,由于Solidworks直接输出的格式并不适用于直接使用,所以采取在Solidworks中输出parasolid格式,然后再将此格式的模型导入到ADAMS/View中。将模型导入后,需要手动加载各关节零件的材料属性,保持质量、重心及转动惯量不变,为了物理量加载及后续约束加载方便,可利用布尔组合命令,将机器人中相互固定的零件设置为同一零件。
3.2 仿真平台的构建
添加完约束后,为了使机器人能够按照实际情况进行运动,还需要在各个关节处添加驱动,然后在各个驱动中写入位移-时间控制参数来对各个关节的运动进行控制。添加完驱动后即可对机器人进行仿真。根据机器人运动的情况,可以将驱动速度设定为匀加速-匀速-匀减速的工况,运用STEP函数即可实现此功能[7]。下面是对各关节的STEP函数设定。
(1)第一关节转动控制函数
STEP(time,0,0,0.5,72d)+STEP(time,0.5,0,5.5,0)+STEP(time,5.5,0,6,-72d),
(2)第二关节转动控制函数
STEP(time,0,0,1,40d)+STEP(time,1,0,9,0)+STEP(time,9,0,10,-40d)
(3)第三关节转动控制函数
STEP(time,0,0,1,40d)+STEP(time,1,0,9,0)+STEP(time,9,0,10,-40d)
(4)第四关节转动控制函数
STEP(time,0,0,1,50d)+STEP(time,1,0,7,0)+STEP(time,7,0,8,-50d)
(5)第五关节转动控制函数
STEP(time,0,0,1,60d)+STEP(time,1,0,6,0)+STEP(time,6,0,7,-60d)
(6)第六关节转动控制函数
STEP(time,0,0,1,80d)+STEP(time,1,0,5,0)+STEP(time,5,0,6,-80d)
由于机器人在运动时会产生摩擦,所以在六个转动副处添加摩擦,在第六关节处添加负载,将时间设定为5s,步数设定为500,之后开始进行动力学仿真工作,其运动状态如图3所示。

图3 机器人动力学仿真参数
通过对整个机器人动力学仿真过程的分析,可以看出机器人在运动过程没有出现运动干涉的现象,证明该协作机器人结构设计合理,各关节及连杆的布置对机器人的运动没有影响。
4 基于ADAMS的机器人动力学仿真分析
4.1 机器人各关节角速度的测量
机器人各关节角速度是动力学中的重要参数,对机器人的整体结构设计有着十分重要的作用,因此在仿真过程中需要测量各个关节的角速度变化情况。根据3.2节确定的各关节角速度数值,利用STEP函数设定后,得到各关节角速度曲线如图4所示。

图4 机器人各关节的角速度曲线
从各关节角速度曲线图中可以看出,机器人在整个动力学仿真过程中,各关节的角速度变化情况符合设定的匀加速启动-匀速运行-匀减速制动的工作状况,并且在加速阶段和减速阶段的过渡比较平稳,没有突变的现象,机器人各关节的运行比较符合实际情况,不会对机器人的整体性能造成影响。
4.2 机器人各关节动能的测量
由于机器人各关节的运动惯性大,运行平稳性较差,实现低速启动,高速运转,低速停止的状态比较困难,所以需要研究各关节在动力学仿真中动能的变化情况。根据3.2中的参数设定后,仿真得到各关节动能曲线如图5所示。

图5 机器人各关节动能
由图5可以看出,各关节的动能曲线可以看出大约在1.5s左右各关节的动能达到最大值,此时各关节都已经进入匀速运动状态,并且关节速度都达到了最大值,各关节的运动比较平稳,没有产生大的震动,符合运动的需求。
4.3 机器人各关节力和力矩的测量
各关节所受的力和力矩也是机器人动力学仿真中的重要参数。通过测量各关节所受的力矩可以验证选择的驱动电机扭矩是否符合要求,同时也可以验证选择的谐波减速器的减速比和力矩是否符合设计要求,所以动力学仿真在机器人的设计中有着非常重要的作用,UR10机器人各关节受力和所受力矩情况如图6所示,UR10机器人各关节可承受的力矩值如表2所示。
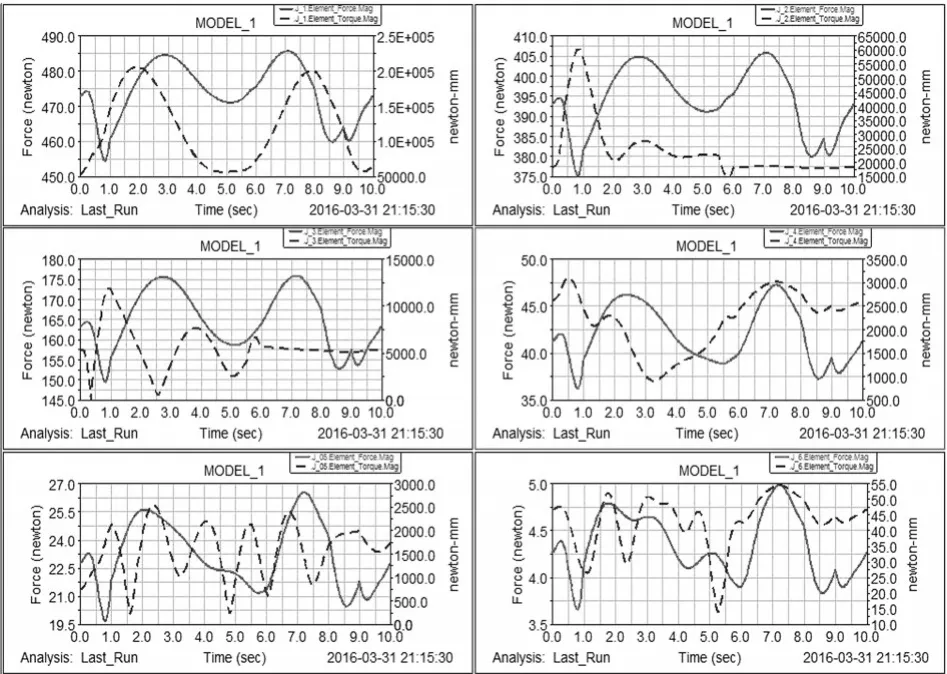
图6 各关节受力和所受力矩情况
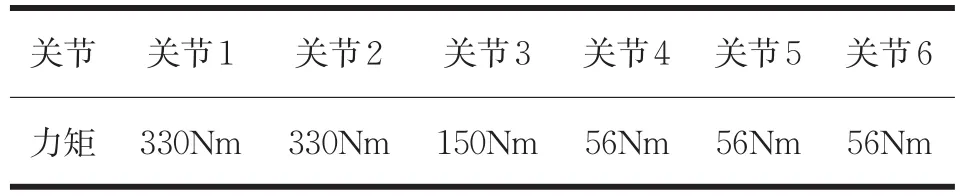
表2 UR10机器人各关节可承受的力矩值
由图6可以看出,机器人在运动过程中各关节的受力和所受力矩情况均在表2所示的UR10机器人各关节能承受的力矩范围内,符合运动的需求。
5 结论
针对UR10模块化协作机器人的构型特点,采用D-H坐标变换法建立其运动学坐标系,采用逆变换法对机器人进行逆运动学求解,求得各个关节转角。运用拉格朗日法对UR机器人进行动力学分析,利用ADAMS多体动力学仿真软件对其进行动力学仿真。结果证明,该模块化协作机器人具有良好的静态平衡性能、运动稳定性和动态响应特性。
[1]Chen L M,Yang G,Kang In-Gyu.Numerical inverse kinematics for modular reconfigurable robots[J].Journal of robotic Systems,1999,16(4):213-225.
[2]Hirzinger G,Sporer N,Albu-Schaffer,et al.DLR’s torque-controlled light weight robot II-Are we reach⁃ing the technological limits now[C].Proceedings of the IEEE International Conference on Robotics and Auto⁃mation,Washington,2002(2):1710-1716.
[3]刘昆,李世中,王宝祥.基于UR机器人的直接示教系统研究[J].科学技术与工程,2015,15(28):22-26.
[4]付大鹏.服务机器人手臂模块化关节的研制[D].哈尔滨:哈尔滨工业大学,2008.
[5]于慧.布局高端装备-盾安环境发布新型人机协作机器人[N].中国工业报,2015-11-30B04.
[6]何庆稀,游震洲,孔向东.一种基于位姿反馈的工业机器人定位补偿方法[J].中国机械工程,2016,27(7):872-876.
[7]陈正水,邓益民.基于UG的STEP运动仿真函数对运动时间的控制分析[J].宁波大学学报:理工版,2012,25(4):103-106.
Movement Characteristics Analysis and
Dynamic Simulation of Modular Collaborative Robot
MA Guoqing,LIU Li,YU Zhenglin,CAO Guohua
(School of Mechatronical Engineering,Changchun University of Science and Technology,Changchun 130022)
For configurational characteristics of UR10 robot,the D-H coordinate transformation method is adopted to establish the kinematics coordinate system,the inverse transform method was used to solve the inverse kinematics of the robot,each joint angle is obtained.Lagrange method was used to analysis the dynamics of UR robot,multibody dynamics simulation software AD⁃AMS was used to its dynamic simulation.The results show that the modular Collaborative robot has good static balance of perfor⁃mance,stability and dynamic response of the motion.
modular collaborative robot;movement characteristics analysis;dynamic simulation
TP242
A
1672-9870(2017)02-0064-06
2016-09-13
国家高技术研究发展计划(863计划)资助项目(2015AA7060112);吉林省科技发展计划资助项目(20160204016GX);吉林省省级产业创新专项资金资助项目(2016C088);长春理工大学青年科学基金(XQNJJ-2016-04)
马国庆(1988-),男,博士研究生,讲师,E-mail:magq@cust.edu.cn
于正林(1971-),男,教授,博士生导师,E-mail:contribute_yu@126.com