灯泡贯流式机组负荷调节问题的分析与处理
2017-05-30谢亚平李渭杰冯启文谢传萍
谢亚平 李渭杰 冯启文 谢传萍
DOI:10.19392/j.cnki.16717341.201714175
摘要:本文针对湖南桃源水电站灯泡贯流式机组功率调节超调问题,结合PID算法原理,分析了现场调节中功率调节系数kp、功率误差e、最大脉冲plus_max、扫描周期ST等主要调节参数对调节动态过程稳定性的影响,并得到满足现场需要的调节参数。
关键词:灯泡贯流式机组;传统PID算法;功率调节
灯泡贯流式水轮发电机组有结构紧凑、体积小、消耗材料少、重量轻,水力损失少、运行方式多、建设周期短、投资省等等诸多优点,是开发利用低水头水利资源的较好方式。然而正因为贯流式机组运行水头低、引用流量大,机组转动惯量小,水流惯性时间常数较大,造成机组在动态负荷调节或者响应大波动的过渡过程时稳定性较差,甚至出现严重的反调现象。传统PID算法因其独立于对象的数学模型,具有结构简单,鲁棒性强等特点,在水电站控制工程实践中得到广泛的应用。当工程现场使用传统PID算法调节灯泡贯流式机组的负荷时,对调节参数进行整定应充分考虑调节速度与调节效果的关系,尽量避免超调。
1 背景
湖南桃源水电站位于湖南省常德市桃源县城附近的沅水干流上,是沅水干流最末的水电开发梯级,装设9台单机容量20MW的灯泡贯流式机组,电站多年平均年发电量7.93亿kW·h,装机年利用小时数4404h。采用NARI公司的计算机监控系统。现场运行时负荷调节较慢,安装单位和业主对PID调节参数进行了整定,使有功PID调节速度达到要求,但功率超调严重,甚至出现过负荷事故停机的情况。
2 功率PID调节
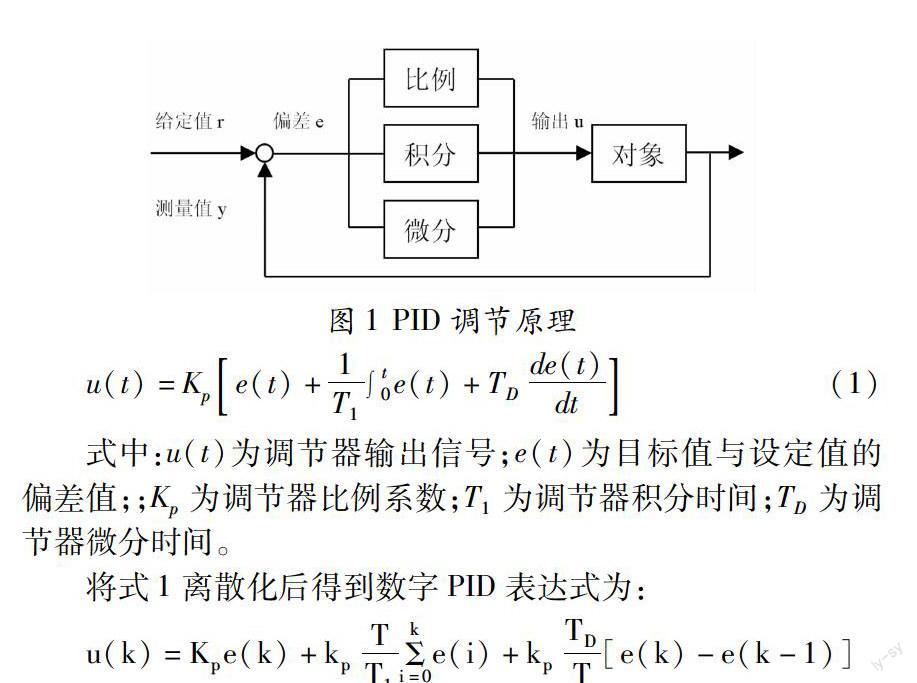
常规PID控制原理图如图1所示,其表达式为:
u(t)=Kpe(t)+1T1∫t0e(t)+TDde(t)dt(1)
式中:u(t)为调节器输出信号;e(t)为目标值与设定值的偏差值;;Kp为调节器比例系数;T1为调节器积分时间;TD为调节器微分时间。
将式1离散化后得到数字PID表达式为:
u(k)=Kpe(k)+kpTT1Σk[]i=0e(i)+kpTDT[e(k)-e(k-1)]
=Kpe(k)+KIΣki=0e(i)+KD[e(k)-e(k-1)](2)
式中:u(k)为调节器输出,e(k)为目标值与设定值的偏差值;T为采样周期;k为采样次数;Kp为调节器比例系数;K1=KPTT1为调节器积分系数;KD=KPTDT为调节器微分系数。
水电站监控系统现场在功率调节时,采用脉冲宽度调节,即监控系统调节器输出为定频调宽方式,且可以不做微分及积分调节,其表达式为:
u(k)=KPE(k)u(k)u(k)=umaxu(k)>umax(4)
式中:u(k)为调节器输出;e(k)为目标值与设定值的偏差值;KP为调节器比例系数;k为采样次数;umax为最大调节脉冲。
分析可知,KP决定系统的动态响应速度和稳态调节误差,KP越大动态响应越快,稳态调节误差越小,但KP过大会导致系统超调震荡,甚至系统发散;umax只影响系统的动态响应速度,在KP不变的情况下,umax越小,系统动态响应速度慢,系统越稳定;同时,在离散调节系统中,扫描周期越长,系统动态响应速度越慢,系统越稳定。
3 现场原因分析
现场试验发现,调节初期,监控系统输出负荷调节指令,负荷小范围有反调现象。在调节末期,监控系统对负荷调节已无输出,但机组功率仍然在增加,最终导致超调。反调现象原因可能有两个,一个原因是执行机构误动作,反向调节;第二个原因是水轮发电机的水锤效应导致功率的反向变化;超调现象的原因可能有两个,一个原因是监控系统无输出,但调速器导叶开度仍然在自动增加;第二个原因是监控系统及调速器导叶开度均不变,但由于机组惯性大,负荷延迟一段时间达到稳定。
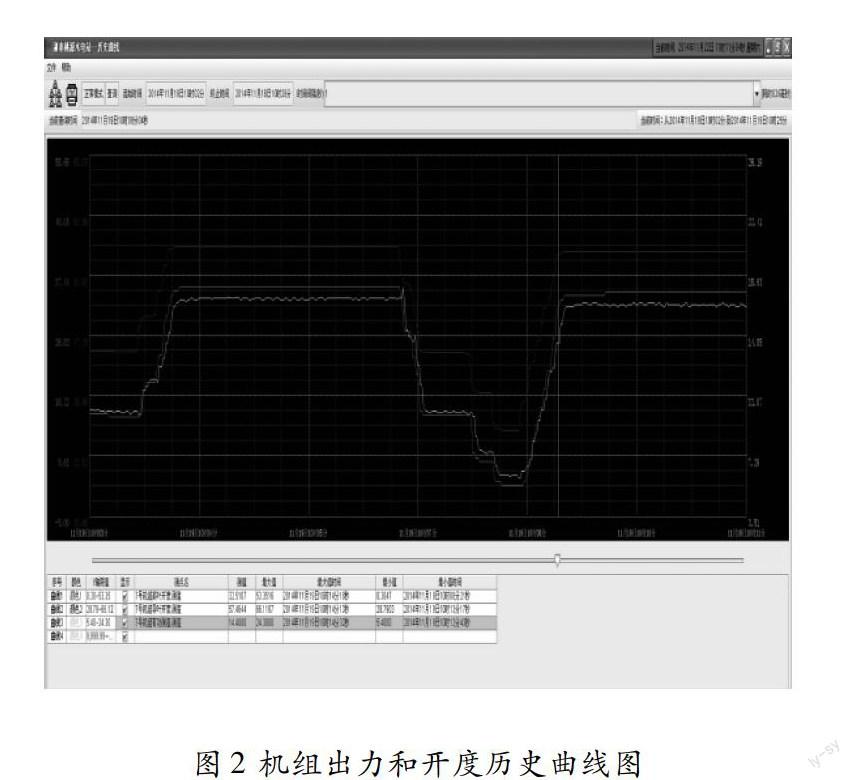
针对上述原因,查询历史曲线发现,调节初期,监控系统输出正常,调速器导叶随即动作,导叶的变化使得作用在水轮机叶片上的水压变化,机组功率相应发生变化,此即水轮发电机的水锤现象;调节末期,监控系统及调速器导叶开度均不变,负荷仍然在增加,跟第二原因相吻合。由此可知,调节末期超调的原因为机组具有比较大的惯性即具有比较大的调节延迟特性;如图2所示。
为了确定机组的延迟特性,对机组进一步做调节阶跃试验:监控系统开出1s~2s的调节脉冲,监视机组动态特性,如图3所示。
由图中曲线可知,调节脉冲输出后,调速器接收到动作脉冲,导叶开始打开,在导叶稳定后,负荷尚未稳定;从调节脉冲到导叶开度稳定,最后到负荷稳定,大约需要约10s的时间。
功率调节单次调节量的大小主要由下面四个方面的因素决定。
1)功率调节系数kp,同等条件下kp越大,理论脉冲输出kp*e越大。
2)功率误差e,同条件下e越大,理论脉冲输出kp*e越大。
3)最大脉冲plus_max,实际脉冲输出为理论脉冲输出kp*e与plus_max中取最小值;单次调节量与实际脉冲输出成正比,即动态调节速度与实际脉冲输出成正比。
4)扫描周期ST,PID模块以ST为周期计算PID调节输出,调速器将所有输出累加后输出。
綜上所述,超调的原因为机组具有水锤效应,且惯性较大,功率反馈延时,监控系统在功率未稳定时多次输出调节脉冲,经调速器累加后输出,导致导叶过度开启,最终负荷超调。
由原因分析可知: 导叶开度增加后,有功负荷并不能实时跟随延时较长,且在初期由于水锤效应甚至会减小,若监控系统在负荷尚未稳定时继续控制导叶增加开度,则必然超调;故监控调节周期需与机组的延迟特性相当;从试验可知,调节末期,负荷延迟与调节约6s,考虑到调速器的积分效应,为了保护机组调节稳定性,故将PID扫描周期由原来的5s延长为7s,最大脉冲plus_max原来的3s缩短为1.8s,功率调节系数kp原来的2 设定为5;重新整定参数后,有功负荷从5MW升至20MW约85s。
4 结语
灯泡贯流式机组现场整定PID调节参数时,应做负荷阶跃响应试验;从而确定扫描周期,有效防止超调;尤其在调节末期,如果调节幅度过大,由于水錘效应的存在,负荷波动会比较大,影响系统的稳定;机组在不同工况下,有功负荷对导叶开度的响应特性不同,可考虑依导叶开度分段调节。
随着机组容量的增大,对机组负荷调节动态过程的要求增高,传统PID算法在有些情况下难以达到预期效果。且影响机组运行的因素并不是唯一的,结合智能优化算法对机组的运行进行优化,可以保证机组安全稳定地运行,同时提高电站的经济效益。
参考文献:
[1]匡和碧,龚崇权,宋海辉.参数自整定FuzzyPI复合控制技术在灯泡贯流式机组中的应用,2002(6):5455.
[2]魏守平.水轮发电机组的惯性比率,2011(4):3132.
[3]王胜强.灯泡贯流式机组运行特点分析,2014:73.
[4]伍奎,等.水电站计算机监控系统的模糊PID功率调节,2004(5):1720.
作者简介:谢亚平(1969),男,硕士,工程师,主要从事水电厂自动化研究工作。