基于模糊控制算法的电动助力转向控制器的设计
2017-05-30于锋陈帅
于锋 陈帅
DOI:10.19392/j.cnki.16717341.201714167
摘要:针对当前汽车电动助力转向系统存在的响应慢,鲁棒性差等问题,设计了一电动助力转向系统的硬件结构,提出了一种模糊控制算法,利用图标的方法表示了模糊控制算中的隶属函数,并对模糊论集进行了规划,最后用matlap对控制算法进行了仿真和验证,试验表明电动助力转向系统运行良好,达到了预期目标,说明该控制器的设计比较成功。
关键词:模糊控制;电动助力;转向;汽车
汽车电动助力转向系统能够减轻驾驶员驾驶疲劳强度,提高汽车行驶的安全性与平顺性,与传统液压系统相比存在以下优点:减少了液压系统繁杂的油路布置,不存在液压油的泄露问题,能够有效提高转向系统的响应精确性,故障相对较少,因此逐渐得到了广泛应用。国内对汽车电动助力转向系统的研究也取得了大量的研究成果。文献[12]从的硬件结构上对电动助力系统进行了研究,取得了良好的效果。文献[35]利用软件模拟的方法对电动助力转向系统进行了分析和论证。文献[68]从软件控制的方法上对电动助力转向系统进行了优化和设计,但上述控制方法鲁棒性较差,实现起来较为困难,设计费用较高,经济性差。针对上述问题,本文利用模糊控制方法对汽车电动助力转向系统控制方法进行了优化和控制,并设计了系统的电子硬件结构。
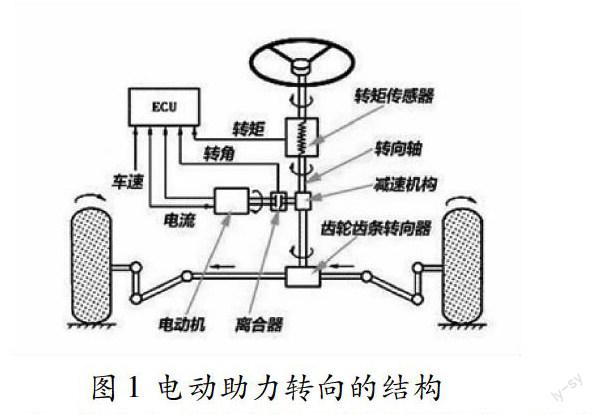
1 电动助力转向的结构
由图1可知,汽车电动助力转向装置的构成主要有如下结构:齿轮齿条式转向器,转向轴和转向柱,转矩传感器,电机和电机控制器,以及控制电脑ECU。工作原理如下:驾驶员在转向过程中,由转矩传感器感知驾驶员转向角度和转向力矩,并把这个信号通过LIN总线传送给ECU,ECU通过CAN总线获取汽车行驶速度,电脑根据汽车的行驶速度和转矩信号判断此时转向系统的状况,并输出一个控制信号给驱动电机放大器,电器放大器放大驱动信号驱动电机转动相应的角度,电机转动通过减速机构驱动转向轴旋转,实现了转向助力。系统还实现了闭环控制,通过一个转角传感器实时监测电机转角,并把电机转角反馈给控制电脑,电脑根据此信号判断电机转动情况,实现闭环控制。
2 模糊控制系统
模糊控制是近代控制理论中建立在模糊集合论基础上的一种基于语言规则与模糊推理的控制理论,它是智能控制的一个重要分支。由于电动助力转向系统驾驶员转向动态不易掌握,难以用定性的数学模型来表达,但,可以由汽车电动助力转向系统转向过程的定性认识出发,比较容易建立语言控制规则, 且,由于电动助力转向模型的控制算法和系统设计方法的始发点和控制目标不同,比较容易造成较大差异。但,模糊控制算法却可以利用电动助力转向的控制规律间的模糊连接,轻松找到折中的方法,使控制效果优于常规控制器,另外由于模糊控制是基于启发性的知识及语言决策规则设计的,在电动助力转向过程中可以模拟驾驶员转向的过程和方法,提高电动助力转向控制系统的适应能力,使系统具有一定的预判性和智能学习的能力,其次模糊控制系统的鲁棒性比较强,抗干扰能力和外部參数变化对控制效果的影响被极大的减弱,非常适合于非线性、时变及纯滞后系统的控制[9],因此本文使用模糊控制策略。
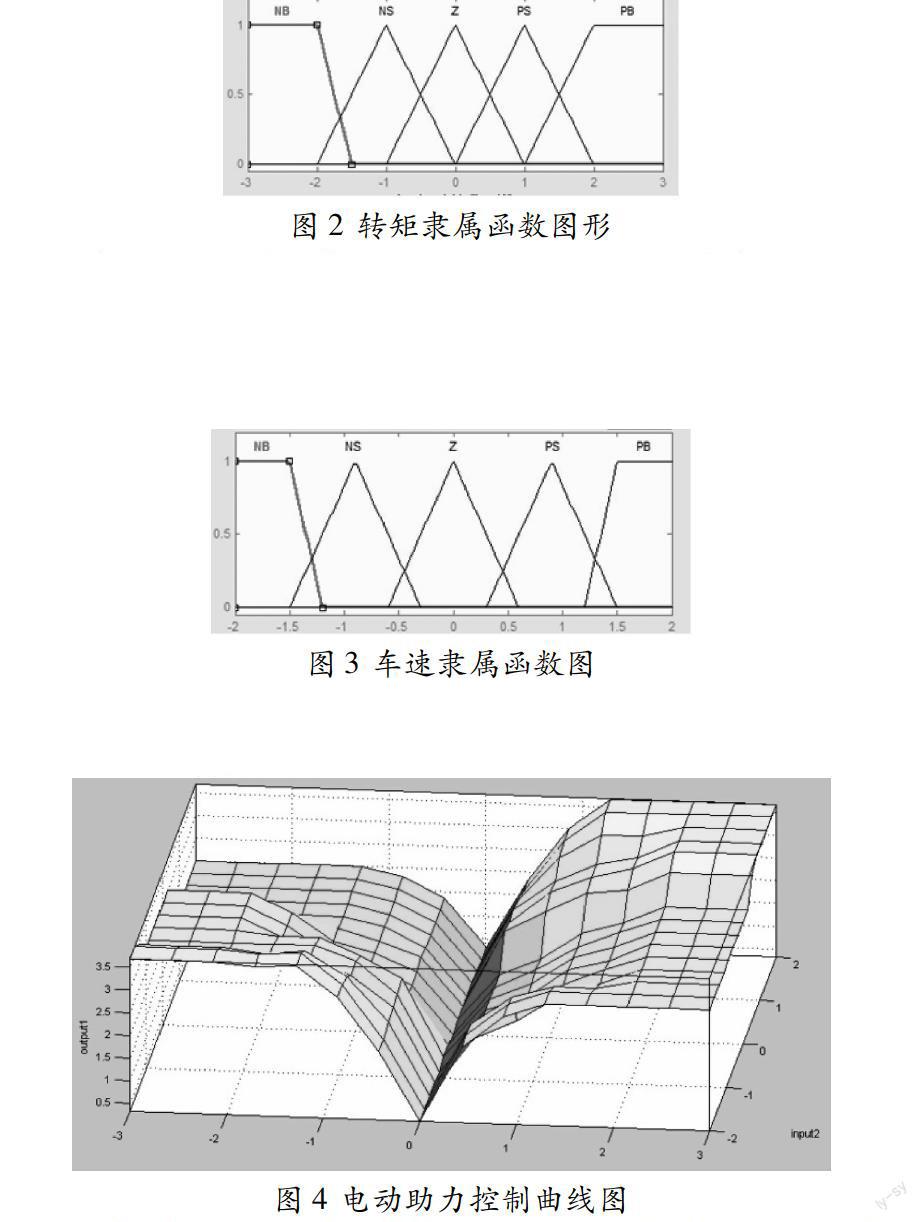
当驾驶员转向时,电动助力转向系统控制器的输入量为转矩传感器传来的转矩信号和从CAN总线传来的车速信号,控制对象为电动助力转向系统的驱动电機。在控制器设计中,取转矩信号误差范围值为[4,4],相应的模糊论域取值为[4,4],量化,7个等级,其余为边界值,如记转矩信号为E,即得出:[4,3,2,0,2,3,4],模糊子集为{PB(正大),PS(正小),Z(零),NS(负小),NB(负大)},输入量的隶属函数可以用图片表达。如图2所示:
车速模糊论域取值为[20,180],180表示最高车速,20表示最低车速,用V表示,即:V=[20,60,100,140,180],模糊子集为{ZE(零), PZ(正零), PS(正小), PM(正中), PB(正大]},隶属函数则用图3函数图表示:
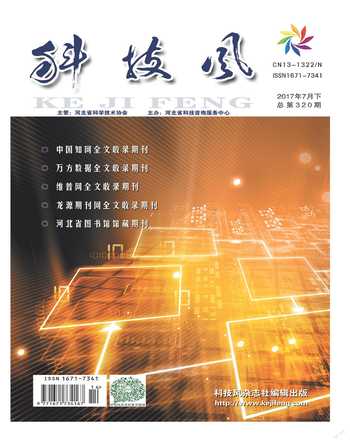
电动助力转向电机隶属函数可以参考文献[10]内容所载。然后利用matlap软件对上述隶属函数图形进行仿真,得出图4.
图4中X坐标为车速信号,Y坐标为转矩信号,Z坐标为电动助力转向系统的控制信号,从图4可以看出控制曲面和线条平滑,并且按照预先设定的规律走向,说明控制系统良好。
接下来对进行实车试验,首先将设计好的控制器装入国产夏利A+的改装车上,通过CAN总线将仪表盘车速信号引接至电动助力转向系统的输入接口,通过常火线对系统供电,并将负极搭铁,启动汽车。开始时以30Km/h速度前进,驾驶员操纵转向盘转向,记录测试驾驶员感觉状况,紧接着以5km/h速度前进,转动转向盘记录驾驶员感觉情况,最后以100km/h速度行驶,转动方向盘记录驾驶员感觉,三次试验表明电动助力转向系统能够明显减轻驾驶者的操纵力度,长时间驾驶能够减少驾驶员劳动强度,减少了方向盘的转数,特别是减少了停车转向时的操纵力,回正力矩较大,验证了电动助力转向系统的成功。
3 结论
在设计了汽车电动助力转向系统的硬件架构的基础上,使用模糊控制策略的方法对硬件结构进行了优化和仿真,结果表明该系统运转良好,系统响应性高,回正力矩较大,异响较小,助力作用明显,起到了良好的设计效果。
参考文献:
[1]李伟,光林颖,王元聪.汽车电动助力转向系统的硬件设计[J].华南理工大学学报(自然科学版),2006,34(2):5256.
[2]赵景波,贝绍轶,刘海妹.纯电动汽车电动助力转向系统驱动装置设计[J].电机与控制应用,2011,38(9):2123.
[3]杨翔宇,吕世明,李楠,徐腾飞.汽车转向系统回正力矩模型的比较及仿真研究[J].机械设计与制造,2016(2):258260.
[4]张钟光.汽车EPs动力学模型分析及控制系统设计[J].青岛大学学报,2003,18(3):7275.
[5]徐中明,胡康博,余烽,张志飞.电动助力转向系统控制策略的仿真分析[J].重庆大学学报,2010,33(8):8084.
[6]陈无畏,王奇瑞.电动助力转向系统的模糊自调整PD控制[J].江苏大学学报(自然科学版),2004,25(2):112115.
[7]陈慧鹏,陈国金,陈立平,龚友平.电动助力转向系统多领域鲁棒控制模型的降阶方法[J].控制理论与应用,2011,28(10):14361440.
[8]刘增俊.基于微控制器和模糊算法的EPS系统设计[J].电子器件,2015,38(3):667669.
[9]丁鹏,田学锋,葛如海,王莹.农用车空气悬架的混沌振动特性[J].江苏农业科学,2017, 45(8):202205.
[10]丁鹏,葛如海.基于模糊控制算法的纯电动汽车空调控制器的研发[J].计算机测量与控制,2015,23(12):40794083.