一种共视接收机相对时延校准方法
2017-05-25陈婧亚许龙霞李孝辉
陈婧亚,许龙霞,李孝辉
一种共视接收机相对时延校准方法
陈婧亚1,2,3,许龙霞1,2,李孝辉1,2
(1. 中国科学院 国家授时中心,西安 710600;2. 中国科学院 精密导航定位与定时技术重点实验室,西安 710600;3. 中国科学院大学,北京 100049)
定时接收机的时延校准方法主要有相对时延校准和绝对时延校准两种,对参与共视时间比对的多台接收机,只需进行相对时延校准。研究了一种接收机相对时延的流动校准方法,该方法使用一套接收机设备作为参考,将参考接收机搬移到不同的地点,测量参考接收机与待校准接收机间的相对时延,实现多台待校准接收机间相对时延的测量。该方法整体考虑接收机端的各项时延,校准步骤简单,对环境没有特殊要求。试验结论表明该方法的相对校准精度可达纳秒级,对于纳秒级的时间比对可以采用该方法对接收机进行相对时延校准。
共视接收机;相对时延;绝对时延;流动校准
0 引言
卫星导航系统是进行高精度时间频率传递的重要手段,目前广泛使用的授时方法是基于导航卫星的单向授时技术,此种方法可以同时为多个用户提供授时服务,且系统的服务容量不受限,用户最高只能获得约15 ns的授时精度[1]。对授时有高精度需求的用户,使用基于GPS、GLONASS、BDS等GNSS系统的共视时间传递技术,可以实现优于10 ns的时间比对精度。共视接收机作为时间比对的工具,其时延的测量精度是直接影响时间比对结果的重要因素之一。因此,在进行时间比对之前需要精确测量参与比对的接收机之间的相对时延。
目前,接收机时延的校准方法主要有相对时延校准和绝对时延校准[2]。接收机绝对时延的测量一直是一项国际难题,现有的测量方法大都复杂并且成本高。接收机时延的相对测量只需要测量两台接收机的时延差,不需要考虑接收机的绝对时延,具有操作简单,校准精度高的优点。对共视时间比对而言,只需要对参与时间比对的共视接收机进行相对时延测量即可。本文研究了一种接收机相对时延的流动校准方法,参与时间比对的共视接收机分别与同一台流动的接收机进行相对时延校准,获得相对于流动接收机的相对时延,进而测得参与比对接收机之间的相对时延差。在该校准方法中,校准时将接收机端的各部分时延包括天线时延、天线电缆时延、接收机内部时延以及参考电缆时延等作为一个整体考虑,实施校准。该方法简化了校准步骤,并且适合搬移到各个待校准地点,不影响待校准接收机的正常运行。
1 接收机相对时延校准方法分析
目前国际上主要有两种接收机相对时延校准方法,一种是以一台内部时延已精确测定的标准定时型接收机作为参考,待校准接收机与参考接收机进行相对时延测量,实现相对时延测量。另一种是利用GNSS信号模拟器测量待校准接收机之间的相对时延,这种校准方法首次被定义和使用是在科罗拉多大学,并首次在NRL进行运用[3]。
1.1 基于参考接收机的相对时延校准方法
该方法通常选用一台在实验室长期稳定运行的共视接收机作为参考接收机。接收机在长期运行过程中需要定期对其绝对时延进行标校。以这台接收机为参考,待校准接收机与参考接收机零基线共钟(即使用相同的时间参考源)配置,同时接收卫星信号进行比对测量,实现对待校准接收机时延的测量。BIPM对全球各实验室之间的共视时间比对接收机均采用这种校准方法。图1给出了待校准接收机与参考接收机相对时延校准的示意图。在待校准地点按照规定的程序和文件格式对接收机单元及参考钟信号之间的所有延迟进行测量。两台接收机使用同一台钟输出的时频信号作为参考[4-5]。
该方法的缺点是在进行相对校准之前需要对参考接收机进行绝对时延的测量,而参考接收机的物理参数也会在使用过程中发生变化,所以需要对参考接收机定期进行绝对时延的校准,而绝对时延的测量是设备时延校准的难点,在不具备绝对校准条件的实验室很难进行应用。
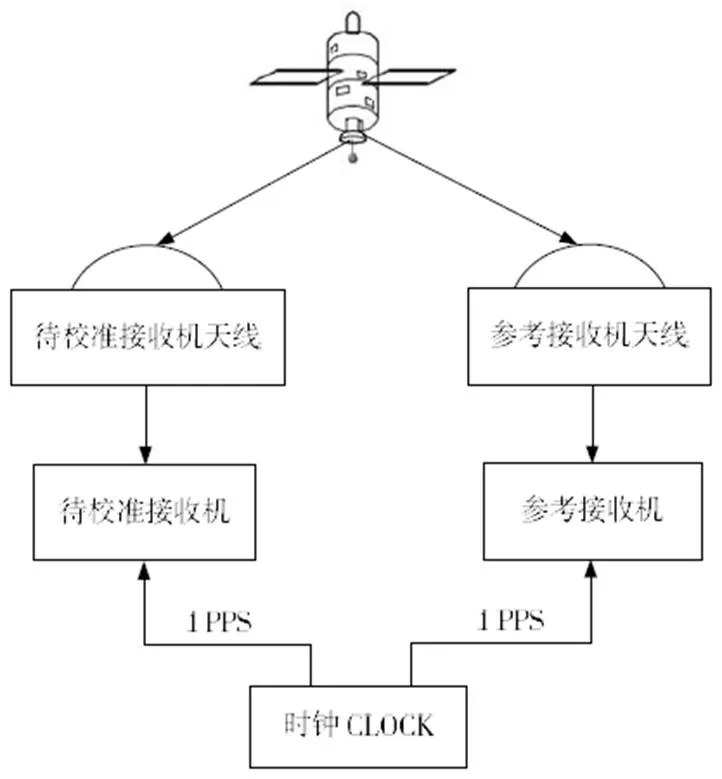
图1 基于参考接收机的相对时延校准方法
1.2 基于信号模拟器的相对时延校准方法
使用信号模拟器进行接收机相对校准的原理如图2所示,信号模拟器输出两路信号,一路为模拟的GNSS射频信号,一路为1 PPS参考信号[3]。利用功率分配放大器将GNSS模拟信号分成功率、相位一致的两路信号分别输入至参考接收机和待校准接收机,两台接收机在零基线共钟的配置条件下同时运行,保存观测数据,进行时间比对。与1.1节中的方法相比,该方法只是将真实的导航信号用模拟的导航信号替代,两种方法的校准原理是一致的,都需要事先测得参考接收机的绝对时延。
该方法的优点是信号模拟器能提供实时,重复可用的卫星星空环境。同时在校准时由于模拟器输出的导航信号直接输出给接收机,所以既不存在卫星端的星钟、星历误差,也避免了信号传播路径中的电离层对流层延迟误差和多径效应的影响。不足是采用的模拟器模拟出的导航信号与真实的导航信号存在差异,对于不同类型的接收机数据处理的方法也不同,且校准成本高昂[3-4]。
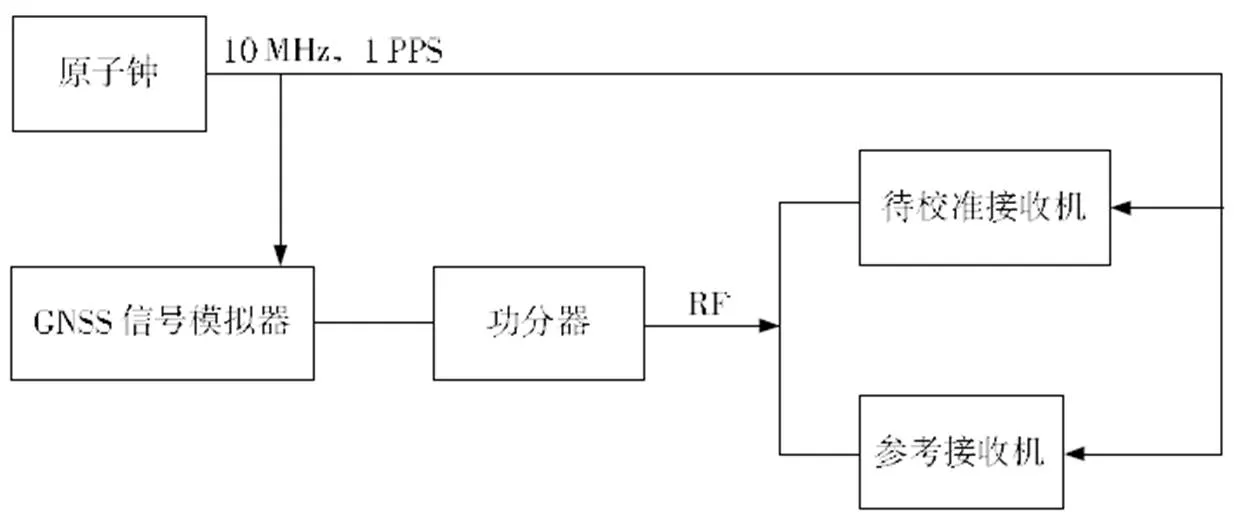
图2 使用信号模拟器进行相对时延校准的原理图
2 接收机相对时延的流动校准方法
对于远距离的多台接收机间的时间比对,使用一套与各校准站点接收机类似的接收机流动校准是较好的方法。首先将第一台待校准的接收机选为参考接收机,将流动接收机与参考接收机在零基线同参考源条件下进行校准,再将流动接收机搬运到其他待校准地点进行校准,最后,将流动校准接收机移动至参考接收机处,再次进行相对时延的测量。测量过程中,固定一套接收机单元、天线、天线电缆及参考电缆,组成接收机流动校准系统,原理如图3所示。参考接收机与流动校准系统在循测开始和循测结束前的相对时延观测量反映了参考接收机和流动校准系统在该次完整校准过程中的变化。在计算各校准站间的相对时延时,需要考虑该变化的影响。

图3 接收机相对时延的流动校准方法原理图
以待校准接收机数量为两台说明上述校准过程,设两台待校准接收机编号为A,B,放置两台接收机的站点为A,B站点,流动校准系统用编号M表示。校准过程包括以下5个步骤:
① 流动校准系统搬运至A接收机所在地,在零基线共钟条件下测量与待校准接收机A的相对时延,校准原理如图3所示。流动校准系统输出的时差值用表示,含义是本地参考与导航系统时间之间的时差。则两者的相对时延值可用式(1)表达:

② 流动校准系统在A站完成测量后,被搬运到B站,在零基线共钟条件下测量与待校准接收机B的相对时延,可用式(2)表示:
。 (2)
③ 流动校准系统再次返回A站,与A站接收机再次进行相对时延的测量,校准结果可用式(3)表示:

, (4)

。 (6)
至此完成了一次完整的测量。该方法固定流动校准系统的组成,不需要单独考虑各个部分的时延,相对1.1节与1.2节中的相对校准方法简单易操作,且上述校准方法对环境没有特殊要求。最重要的是,不需要事先测量流动校准系统的绝对时延值,避免了绝对校准的难题,同时考虑了流动校准系统在校准期间时延发生变化引起的测量不确定性。
3 接收机相对时延校准结果
针对第二部分提出的相对时延校准方法,开展相对时延校准试验。数据来源于中国科学院国家授时中心的两台型号相同的多模(GPS/GLONASS)多通道共视接收机,一台作为流动接收机记为A,另一台为待校准接收机记为B。两台接收机均以国家授时中心保持的UTC(NTSC)时间信号为参考,零基线运行,接收机每分钟输出一组符合标准共视格式GGTTS的数据,包括卫星号(PRN),时标(STTIME)及本地钟相对于GPS/GLONASS系统时的偏差(REFGPS)这些观测数据作为试验数据。接收机可以同时接收GPS和GLONASS系统的信号,数据中的代表本地参考时间UTC(NTSC)与导航系统时间的时差。
以接收机接收GPS信号为例,接收机A观测某颗GPS卫星(1~32)得到的记为,同理接收机B观测某颗GPS卫星得到的记为,在同一时刻,A接收机观测到颗GPS卫星,B接收机观测到颗GPS卫星,接收机相对时延(包含接收机缆线时延,内部时延,外部参考时延)记为。则在每个时刻有:
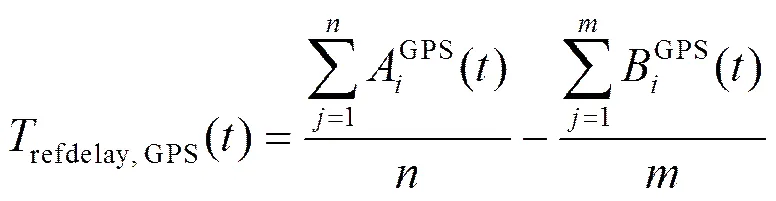
同理,可以得到接收机在时刻通过观测GLONASS卫星获得的相对时延值。图4所示为两台接收机分别基于GPS和GLONASS卫星在1个月(约化儒略日57126~57156)内的相对时延变化。
图4 基于GPS,GLONASS的共视接收机相对时延变化

表1 GPS,GLONASS相对时延的均值和方差 ns
为了分析相对时延随着时间的变化情况,本文分析计算了相对时延校准结果在不同的取样间隔下的稳定度,即时间方差TDEV,其是一种时间稳定度的表征手段:

图5和图6分别为基于GPS,GLONASS的相对时延在一个月时间的时间方差图。通过GPS测得的相对时延在取样间隔1 d时对应的时间稳定度为4×10-10,取样间隔为5 d时的时间稳定度约为1×10-10。通过GLONASS测得的相对时延在取样间隔1 d时对应的时间稳定度为4×10-10,取样间隔为5 d时的时间稳定度约为2×10-10。从结果来看,基于两种导航系统测得的结果的时间稳定度基本是一致的,反映了两台接收机间相对时延的变化特性,即平均1 d的影响是0.4 ns,平均5 d的影响为0.1 ns。对于精度纳秒量级的授时方法而言,该方法测得的相对时延精度可以满足要求。
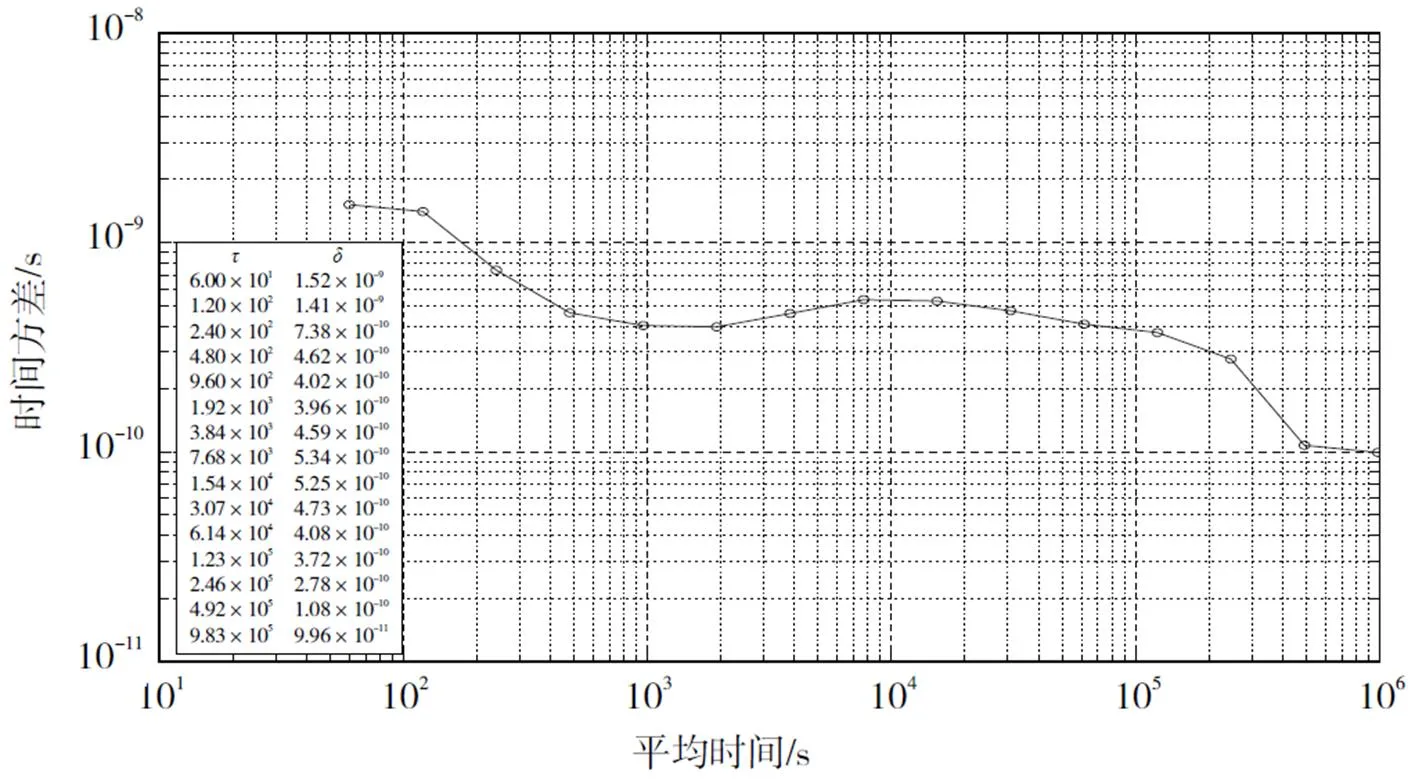
图5 基于GPS卫星的接收机相对时延的时间方差
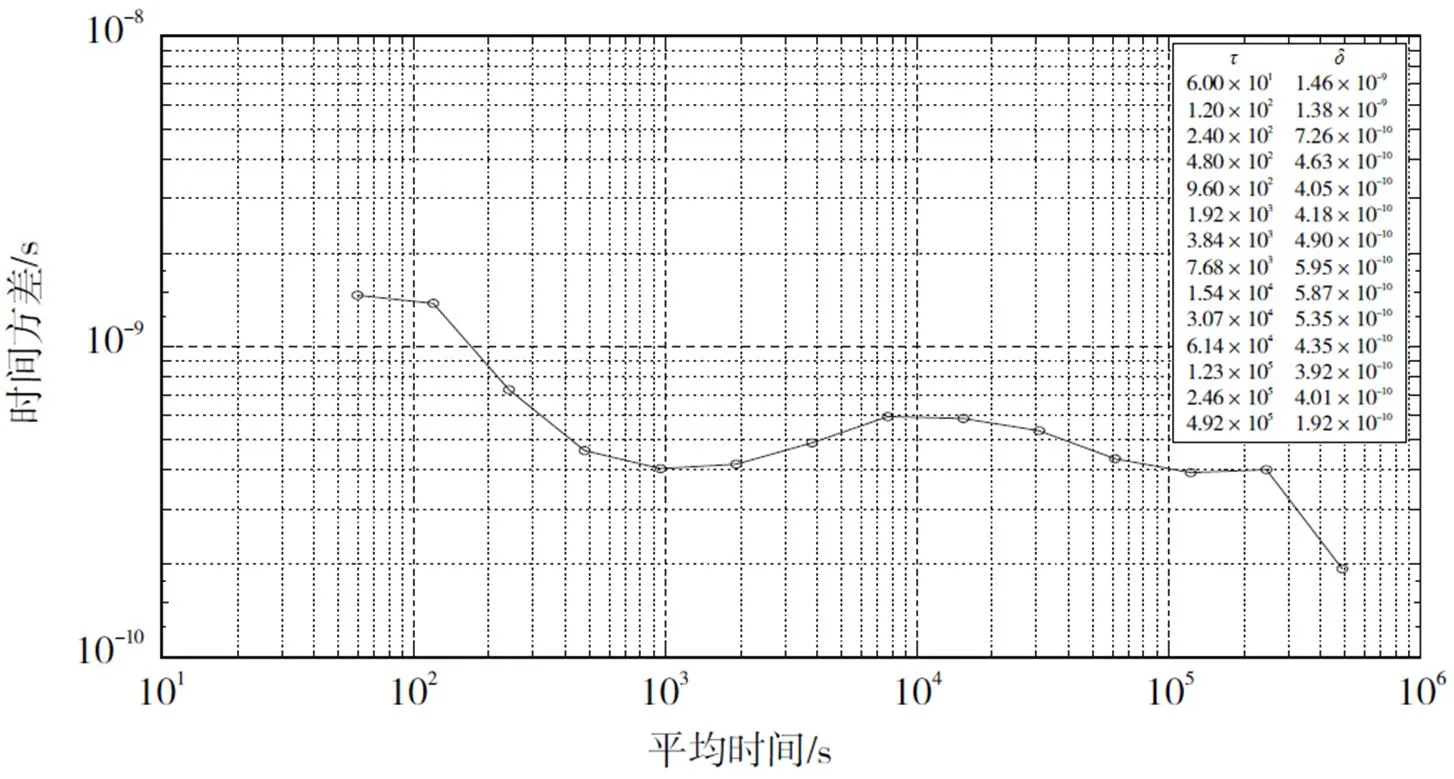
图6 基于GLONASS卫星的接收机相对时延的时间方差
GPS与GLONASS系统采用的信号调制技术是不同的。GPS使用码分多址技术,接收机端通过复现不同卫星的PRN码来识别卫星。GLONASS使用频分多址技术,所有卫星的PRN码是相同的,通过不同的载波频率来区分不同的卫星。每颗GLONASS卫星的L1,L2载波频率设计如下:

, (10)
式(9)和(10)中,为频率通道号,变化范围从-7~6。根据GLONASS频率号与卫星号的关系[4, 7],对于L1频点,= 6时对应卫星号为4和8,= -7时对应卫星号为10和14。这两对卫星的载波频率相差最大,在分析频间偏差对相对时延的影响时,重点分析这4颗卫星的相对时延变化。
在考虑单颗卫星对接收机相对时延的影响时,接收机A,B在相同时刻,观测到某颗GLONASS卫星,通过两台接收机输出此时刻的本地参考时间与GLONASS卫星时间的时差值和,得到接收机相对时延为

GLONASS 4颗卫星在约化儒略日57 126~57 156时间的相对时延变化规律如图7所示。
图7 GLONASS载波频率对接收机相对时延校准结果的影响
由图7可以看出当GLONASS卫星的载波频率相同时,对应的相对时延值也较为接近,如4,8号卫星对应的相对时延值,10,14号卫星对应的相对时延值。而当载波频率相差较大时,相对时延值就有较明显的变化。为了进一步分析,建立对应不同卫星不同频率的接收机时延查找表如表2所示。该表给出所有GLONASS卫星对应不同频率的相对时延值,从表中数据可以看出当频率范围在1605.3750~ 1600.8750MHz时,除个别卫星外不同卫星的相对时延值变化不大,但当载波频率再减小超出上述范围时,相对时延有较明显的减小趋势,可见GLONASS频间偏差对相对时延的影响不呈线性关系,最大影响量为6 ns,是共视时间比对中不可忽视的因素。因此,在使用GLONASS进行接收机相对时延校准时,需要针对不同的载波频率分别校准。
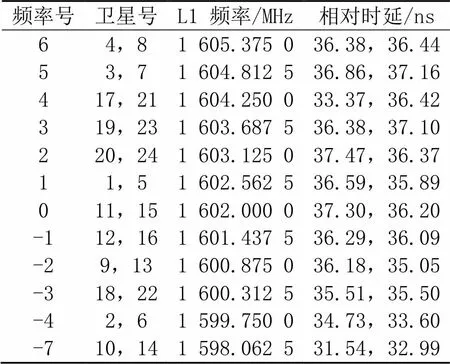
表2 GLONASS不同卫星不同频率的接收机时延表
4 结论
本文研究了一种接收机时延的相对校准方法,该方法没有对接收机每部分的时延值分别考虑,利用一套流动校准设备整体实现对待校准接收机的时延测量,可以方便灵活地对时间比对链路中的接收机进行高精度的校准。基于该方法开展了试验,分析了在基于不同导航系统进行接收机相对时延校准获得的相对时延的稳定度,分析结果表明该方法可以实现精度优于1 ns的相对时延测量,可应用于纳秒级的时间比对接收机校准。根据GLONASS卫星的相对时延校准结果,分析验证了GLONASS频间偏差对接收机相对时延的影响,为用户使用该方法进行相对时延校准提供了参考。
[1] 许龙霞. 基于共视原理的卫星授时方法[D]. 西安: 中国科学院国家授时中心, 2012.
[2] 吴海涛, 李孝辉, 卢晓春, 等. 卫星导航系统时间基础[M]. 北京: 科学出版社, 2011.
[3] PROIA A,CIBIEL G,YAIGRE L. Time stability and electrical delay comparison of dual-frequency GPS receivers[C]//Proceeding of the 41st Annual Precise Time and Time Interval System and Applications Meeting, New Mexico: Ion publications, 2009: 293-302.
[4] WHITE J, BEARD R, LANDIS G, et al. Dual frequency absolute calibration of a geodetic GPS receiver for time transfer[C]// Proceeding of the 15th European Frequency ang Time Forum, Neuchâtel, Switzerland: [s.n.], 2001: 167-172.
[5] FOKS A, NAWROCKI J, LEWANDOWSKI W. Latest calibration of GLONASS P-Code time receivers[C]// 36th Annual Precise Time and Time Interval(PTTI) Meeting, Washington DC: [s.n.], 2004: 99-104.
[6] 李孝辉, 杨旭海, 刘娅, 等. 时间频率信号的精密测量[M]. 北京: 科学出版社, 2010.
[7] 朱峰. 卫星导航中的时间参数及其测试方法[D]. 西安: 中国科学院国家授时中心, 2015.
A method for calibrating relative delay of common-view receivers
CHEN Jing-ya1,2,3, XU Long-xia1,2, LI Xiao-hui1,2
(1. National Time Service Center, Chinese Academy of Sciences, Xi’an 710600, China; 2. Key Laboratory of Precision Navigation and Timing Technology, National Time Service Center, Chinese Academy of Sciences, Xi’an 710600, China; 3. University of Chinese Academy of Sciences, Beijing 100049, China)
The methods for calibrating the delay of timing receivers mainly include differential calibration method and absolute calibration method. For the several receivers participating in common-view observations, only the relative calibration is needed. A mobile calibration method for receiver time-delay is studied, in which a set of traveling receiver equipment is used as the reference and the relative delays between the mobile receiver and the receivers needed to be calibrated are measured, then the relative delays among the several receivers can be obtained. The calibration steps are simplified in this method because all kinds of receiver delays are treated integrally, moreover, no special environment is required for this method. Experiment results indicate that the calibration accuracy can reach the order of nanoseconds, therefore this relative calibration method can be used to calibrate the relative delay of receivers in nanoseconds-level time transfer.
common-view receivers; relative delay; absolute delay; mobile calibration
TN965.5
A
1674-0637(2017)01-0019-08
10.13875/j.issn.1674-0637.2017-01-0019-08
2016-05-18
国家自然科学基金青年基金资助项目(11503030);地理信息工程国家重点实验室开放研究基金资助项目(SKLEIE2014-M-2-5);中国科学院“西部之光”人才培养计划“西部博士”资助项目(2013BS24)
陈婧亚,女,硕士,主要从事接收机校准和共视授时相关研究。
