平衡功能测试与评估系统数据预处理方法研究
2017-05-25马天亮毛志勇吉小军
马天亮 毛志勇 王 典 蔡 萍 吉小军
(上海交通大学电子信息与电气工程学院仪器科学与技术系动态检测研究室,上海 200240)
平衡功能测试与评估系统数据预处理方法研究
马天亮 毛志勇 王 典 蔡 萍 吉小军
(上海交通大学电子信息与电气工程学院仪器科学与技术系动态检测研究室,上海 200240)
压力中心(COP)测量在评价人体平衡功能的实验中有着广泛的应用,本文介绍了一种基于FPGA的平衡功能测试系统,该系统以FPGA作为控制核心,实现了六个力分量的同步测量,动态测量出被试者压力中心并绘制轨迹。针对高频干扰严重影响测量准确性的问题,对数据预处理中平滑窗的合理设置展开了实验研究。实验结果表明,使用二分之一数据帧长度的均值平滑窗能有效提高轨迹平滑度。基于本系统,采用不同负重的方式进行工效评估,证明本系统能准确评价平衡功能。测量过程中应根据晃动剧烈程度选择动摇轨迹总长度和轨迹包络面积这两个指标作为评价依据。
压力中心 平衡能力 轨迹平滑
1 引 言
平衡功能是人体维持身体各种姿势以及在外力作用时产生适当反应的能力[1]。平衡过程中,踝、膝、髋关节以及下肢肌群和躯干在中枢神经系统的指挥下,参与姿势的调整与控制,使身体的重心垂直投影在双腿支撑面上,从而达到身体的平衡与稳定。影响人体保持平衡能力的因素除了与个体的前庭感觉以及肌肉和骨骼力量有关外,还与服装附加质量及关节受约束情况有关。
对舱外航天服的工效进行评估对于确保航天员在太空中保持良好工作状态具有重要意义。工效学是根据人的心理、生理和身体结构等因素,研究人、机械、环境相互间的合理关系,以保证人们安全、健康、舒适工作的综合性学科。工效的评估可从多个层面进行,利用平衡觉进行穿戴服装的工效评估是其中之一。现有舱外航天服质量大多在100公斤左右,压力服内压差20~40kPa,虽然太空中重力加速度比在地球上小,但质量和惯量对运动的影响是一样的。航天员在舱外进行行走、转体和搬运物体等作业时,质量分布不合理造成的质心位置不合理和附加惯性矩会增加宇航员的体能消耗,影响平衡能力[2]。
目前基于压力中心的平衡能力评价方法应用最为广泛,人体压力中心通过测量地反力Fx,Fy,Fz三个力以及Mx,My,Mz三个力矩得到,设航天员所穿航天靴的厚度为h,具体表达式为[3]
(1)
(2)
根据压力中心坐标的变化对平衡功能进行评估。
由于模拟电路与数字电路共电以及高速数据采集等引起的高频干扰严重影响压力中心的准确评估。本文针对自主研发的多维测力台的信号特点,对数据平滑处理进行了深入研究。在此基础上从平衡觉角度对舱外航天服进行工效评估实验,研究并得出最适合用来评估平衡功能的评价指标。
2 系统构成
人体平衡功能评估系统包括测量Fx,Fy,Fz三个力及Mx,My,Mz三个力矩的多维测力台、信号调理电路、ADC模块、FPGA主控芯片和USB模块。系统框图如图1所示。
多维测力台的六个电桥通过独立的六路放大电路进行放大之后通过六路并行模数转换电路转成数字量,再经过FPGA芯片打包成数据帧,测量数据通过USB模块发送到上位机。上位机经过解算显示出被测者晃动时压力中心轨迹变化图像。多维测力台示意图如图2所示。下位机主控FPGA程序采用模块化的编程思想。主要包括时钟分频、A/D采样控制、USB通信控制这三个模块。FPGA中的顶层文件原理框图如图3所示。
2.1 时钟分频模块
在该系统中,外部输入的时钟频率为20MHz,A/D模块中的芯片需要一个周期为25μs的转换开始的上升沿,本设计中采样设定延迟500个时钟周期的方法得到所需的A/D芯片转换启动信号。
2.2 A/D转换控制模块
本设计数据采集系统使用的A/D转换器为ADI公司的高速6路并行16位AD7656芯片,能够在3us时间内并行完成6路输入数据的模数转换。
2.3 USB通信控制模块块
FPGA作为控制核心,采用异步Slave FIFO方法实现与CY7C68013 USB控制芯片的数据传输。进行数据传输时,FPGA首先设定USB芯片向上位机传输数据的传输端口和USB的FIFO信道地址选择端口,然后将数据全部写入USB芯片。
3 数据预处理
由于测量电路的数字电路和模拟电路使用同一组电源以及快闪式A/D转换对高频噪声敏感[4]等原因,采集到的数字信号信噪比不高;此外,系统中下位机向上位机传送数据采用的是块传送方式,采集过程不连贯,也导致轨迹图像平滑性严重降低[5]。因此,需要对数字信号进行平滑处理。
下位机上传给上位机的一帧数据中包含313次模数转换数据,考虑到下位机采样率、硬件传输延迟和上位机数据解算时间,从采集到处理完毕一帧数据的时间大约为0.2s。为保证系统显示的同步性,至多延时0.5s显示当前位置,实验中平滑窗口大小最大设置为两帧数据长度。设计窗口大小分别为1/8,1/4,1/2,1和2倍帧长度,测试人员直立静止双足站立测力台上30s,按时间顺序读取全部采集到的压力中心轨迹坐标点,不同数据预处理方式的轨迹图像如图4~图6所示。
由图4~图6可以看到,未经过平滑的原始数据图像受到高频噪声影响显著,数据点随机波动情况明显,轨迹线多数重合在一起,压力中心变化细节从图上几乎无法分辨。平滑之后改进效果明显,平滑窗口大小在二分之一帧及以上时细节已经清晰可辨。取二分之一帧大小和一帧大小的窗平滑图像时结果变化不大。当平滑窗大小为两帧时,开始出现细节丢失(左上方转向突变轨迹消失)。考虑到数据显示延迟的影响,取二分之一帧大小的窗口,平滑度和图像细节都令人满意,延时也较小(0.1s)。因此通过实验,上位机编写程序采用每读取二分之一帧数据进行一次均值平滑,从而获得一个图像点的方式绘制压力中心轨迹图像。
4 负重对平衡功能影响的实验研究
本文用模拟负重的方法探究舱外航天服对航天员平衡功能的影响,三组实验描述如下。实验一:受试者不负重和背部20kg负重,双足静立对比实验;实验二:受试者不负重和背部20kg负重,单足静立对比试验;实验三:受试者双手臂外展无负重和双手臂外展各负重10kg,双足静立对比实验。
目前用于评定人体平衡状态的测试指标多达二十种,通过筛选,本研究选择COP动摇轨迹总长和COP包络面积作为平衡能力的评价指标。COP动摇总轨迹长表示测试时间段内压力中心动摇轨迹的总长度,可体现足底压力中心在水平面上总体动摇情况。包络面积为力中心在多维测力台上投影的轨迹曲线包络线所围绕的面积,主要表征身体中心动摇幅度大小。
三组实验轨迹图像如图7~图9所示,测试指标对比结果如表1所示。
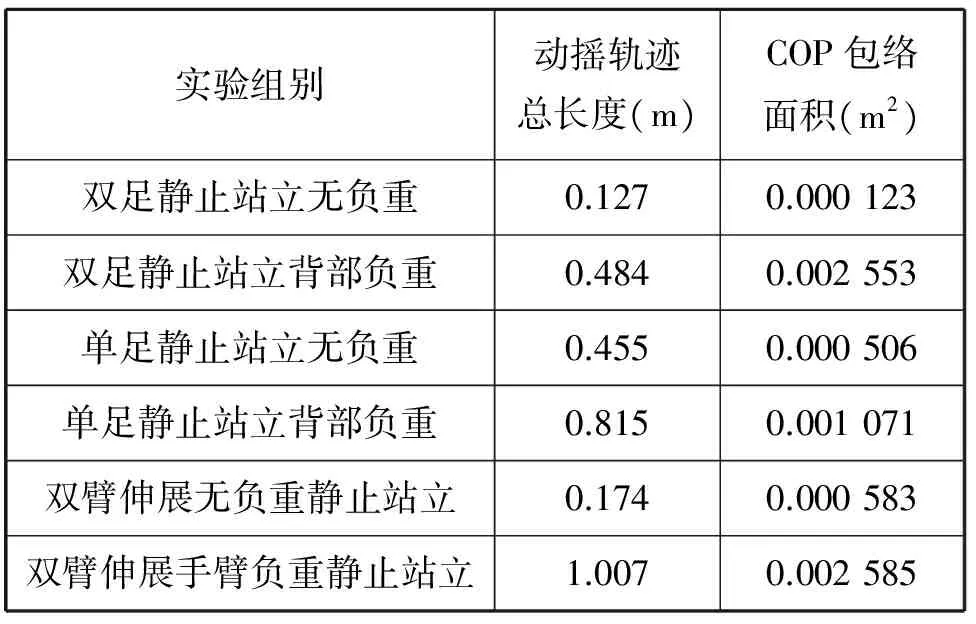
实验组别动摇轨迹总长度(m)COP包络面积(m2)双足静止站立无负重0.1270.000123双足静止站立背部负重0.4840.002553单足静止站立无负重0.4550.000506单足静止站立背部负重0.8150.001071双臂伸展无负重静止站立0.1740.000583双臂伸展手臂负重静止站立1.0070.002585
从实验结果可以看到,双足静立背部负重实验中,负重组与不负重组轨迹总长度之比为3.81,而包络面积之比达到20.75;单足静立背部负重试验中,负重组与不负重组轨迹总长度之比为1.79,包络面积之比达到2.11;双臂伸展臂部负重实验中,负重组和不负重组轨迹总长度之比为5.79,包络面积之比为4.43。受试者自我感觉负重前后保持平衡困难程度三组实验递增,负重和不负重相比晃动程度三组实验递增。当晃动不太明显时,晃动速度低,轨迹线短,包络面积比动摇轨迹总长度更灵敏,应选择包络面积作为主要评价指标;当晃动比较明显时,晃动速度大,轨迹往返明显,动摇轨迹总长度能更好评价平衡状况。
5 结束语
本文介绍了一种基于FPGA的平衡功能测试系统数据预处理方法,选择二分之一数据帧长度的数据平滑窗进行数据预处理之后,图像平滑程度有较大改善。通过不同情况负重实验,对比分析了两种常用平衡功能评价指标。实验结果表明,被测者晃动不明显时,采用动摇轨迹包络面积能更灵敏的反映平衡功能;当晃动明显时,采用动摇轨迹总长度这一指标更能准确反映平衡状况。该系统可望用于舱外航天服工效评估。
[1] 蔡楷.人体足底压力及平衡功能测试系统关键技术研究及实现[D]. 上海交通大学, 2013.
[2] 陈卓鹏.航天员低重力步行模拟训练被动外骨骼系统概念研究[D]. 南京航空航天大学,2014.
[3] D.Lafond, M. Duarte,F.Prince.Comparison of three methods to estimate the center of mass during balance assessment [J].Journal of Biomechanics 2004(37):1 421~1 426.
[4] 高琴.基于嵌入式软核处理器技术的便携式人体足底压力分布测量系统[D]. 西安工程大学, 2007.
[5] 裴鹏.足底压力形成与人体多影响因素关系机理及测量系统研究[D].河北工业大学,2013.
Research on Data Preprocessing Method of Balance FunctionTest and Evaluation System
MA Tian-liang MAO Zhi-yong WANG Dian CAI Ping JI Xiao-jun
(Dynamic measurement group, school of electronic information and electrical engineering,Shanghai Jiao Tong University, Shanghai 200240, China)
In experiment for evaluation of human body balance function, the center of pressure (COP) trajectory measuring method has been widely used. This paper introduces a kind of balance function test system based on FPGA. As the control center of the system, it realizes the measurement of six forces synchronously, calculating the center of pressure (COP) and plotting the trajectory simultaneously. Aimed at the problem that high frequency interference seriously affects accuracy of the measurement, research about reasonable setting of the smooth window in data preprocessing has been carried out. The result shows that using a smooth window which is half the length of the data frame can improve the smoothness of the trajectory effectively. Based on this system, experiment has been carried out using the method of bearing load to evaluate ergonomics. The result shows that this system can evaluate balance function accurately. During measurement, the length of trajectory and the area of envelope curve should be chosen depending on the shaking intensity to evaluate the balance function.
Balance function Center of pressure Trajectory smoothness
2016-05-24,
2016-12-22
国家自然科学基金重大项目(61190124),国家科技支撑计划重点项目课题(2009BAI71B06)
马天亮(1992-),男,硕士研究生,主要研究方向:压力传感器技术及FPGA的开发。
1000-7202(2017) 02-0022-04
10.12060/j.issn.1000-7202.2017.02.05
TH823
A
